


Spacecraft and Aircraft Dynamics
Matthew M. Peet
Illinois Institute of Technology
Lecture 9: 6DOF Equations of Motion











Besser lernen dank der zahlreichen Ressourcen auf Docsity

Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo

Prüfungen vorbereiten
Besser lernen dank der zahlreichen Ressourcen auf Docsity
Download-Punkte bekommen.
Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo
111111111111111111111111111111111
Art: Grafiken und Mindmaps
1 / 24

Diese Seite wird in der Vorschau nicht angezeigt
Lass dir nichts Wichtiges entgehen!
Illinois Institute of Technology^ Matthew M. Peet
Lecture 9: 6DOF Equations of Motion
Lecture 9
In this Lecture we will cover: Newton’s Laws
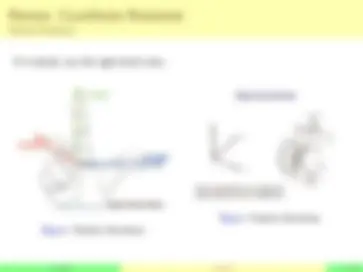
Roll-Pitch-Yaw
There are 3 basic rotations an aircraft can make:
Forces
These forces and moments have standard labels. The Forces are: X Axial Force Net Force in the positive x-direction Y Side Force Net Force in the positive y-direction Z Normal Force Net Force in the positive z-direction
Forces Newton’s Second Law tells us that for a particle F = ma. In vector form: F^ ~ = ∑ i
F^ ~i = m d dt
That is, if F~ = [Fx Fy Fz ] and V~ = [u v w], then Fx = m du dt Fx = m dv dt Fz = m dw dt
L^ ~ = mV~ is referred to as Linear Momentum. Newton’s Second Law is only valid if F~ and V~ are defined in an Inertial coordinate system.
A coordinate system is Inertial if it is not accelerating or rotating.
Moments Using Calculus, this concept can be extended to rigid bodies by integration over all particles. M^ ~ = ∑ i
M^ ~i = d dt
Where H~ = ∫^ (~rc × ~vc)dm is the angular momentum. Angular momentum of a rigid body can be found as H^ ~ = I~ωI where ~ωI = [p, q, r]T^ is the angular rotation vector of the body about the center of mass.
Examples:
Homogeneous Sphere
Isphere =^25 mr^2
Ring
Iring = mr^2
Examples:
Homogeneous Disk
Idisk =^14 mr^2
1 + (^13) r^ h 2 0 0 0 1 + (^13) r^ h 2 0 (^0 0 )
(^) kslug − f t^2
Thus we have
Fx Fy Fz
(^) = m
u˙ v ˙ w ˙
(^) + m det
xˆ ˆy zˆ p q r u v w
(^) = m
u˙ + qw − rv v ˙ + ru − pw w ˙ + pv − qu
and
Ixx −Ixy −Ixz −Iyx Iyy −Iyz −Izx −Izy Izz
p˙ q ˙ r ˙
(^) + ~ω ×
Ixx −Ixy −Ixz −Iyx Iyy −Iyz −Izx −Izy Izz
p q r
Ixx p˙ − Ixy q˙ − Ixz r˙ −Ixy p˙ + Iyy q˙ − Iyz r˙ −Ixz p˙ − Iyz q˙ + Izz r˙
(^) + ~ω ×
pIxx − qIxy − rIxz −pIxy + qIyy − rIyz −pIxz − qIyz + rIzz
Ixx p˙ − Ixy q˙ − Ixz r˙ + q(−pIxz − qIyz + rIzz ) − r(−pIxy + qIyy − rIyz ) −Ixy p˙ + Iyy q˙ − Iyz r˙ − p(−pIxz − qIyz + rIzz ) + r(pIxx − qIxy − rIxz ) −Ixz p˙ − Iyz q˙ + Izz r˙ + p(−pIxy + qIyy − rIyz ) − q(pIxx − qIxy − rIxz )
Which is too much for any mortal. For aircraft, we have symmetry about the x-z plane. Thus Iyz = Ixy = 0. Spacecraft?
Reduced Equations With Ixy = Iyz = 0, we have, in summary:
Fx Fy Fz
(^) = m
u˙ + qw − rv v ˙ + ru − pw w ˙ + pv − qu
and (^)
Ixx p˙ − Ixz r˙ − qpIxz + qrIzz − rqIyy Iyy q˙ + p^2 Ixz − prIzz + rpIxx − r^2 Ixz −Ixz p˙ + Izz r˙ + pqIyy − qpIxx + qrIxz
Right now,
Example: Snipers Simplified EOMs: Using q = r = 0, we simplify to u ˙ = 0 v˙ = pw w˙ = −pv. Solution: For initial condition u(0) = 0, v(0) = V and w(0) = 0 has solution u(t) = 0 v(t) = v(0) cos(pt) w(t) = −v(0) sin(pt) Since p is very small compared to flight time, we can approximate u(t) = 0 v(t) = v(0) w(t) = −v(0)pt Which yields displacement N (t) = 0 E(t) = v(0)t U (t) = − 12 v(0)pt^2 Conclusion: For a target at range E(ti) = 4km, we have ti = 4s and hence the error at target is: N (ti) = 0 U (ti) = − 12 ∗ 2000 ∗. 0000727 ∗ 16 = − 1. 1635 m Of course, if we were firing west, the error would be +1. 1635 m.
Issue: Equations of motion are expressed in the Body-Fixed frame. Question: How do determine rotation and velocity in the inertial frame. For intercept, obstacle avoidance, etc. Approach: From Lecture 4, any two coordinate systems can be related through a sequence of three rotations. Recall these transformations are:
Roll Rotation (φ) : R 1 (φ)
=
0 cos φ − sin φ 0 sin φ cos φ
Pitch Rotation (θ): R 2 (θ)
=
cos θ 0 sin θ 0 1 0 − sin θ 0 cos θ
Yaw Rotation (ψ): R 3 (ψ)
=
cos ψ − sin ψ 0 sin ψ cos ψ 0 0 0 1
To move a vector Body-Fixed Frame ⇒ Inertial Frame we need to Invert the Rotations. Rotation matrices are easily inverted, however Ri(θ)−^1 = Ri(−θ) Thus V~I = (R 1 (φ)R 2 (θ)R 3 (ψ))−^1 V~BF , where (R 1 (φ)R 2 (θ)R 3 (ψ))−^1 = R 3 (ψ)−^1 R 2 (θ)−^1 R 1 (φ)−^1 = R 3 (−ψ)R 2 (−θ)R 1 (−φ)
=
cos ψ − sin ψ 0 sin ψ cos ψ 0 0 0 1
cos θ 0 sin θ 0 1 0 − sin θ 0 cos θ
0 cos φ − sin φ 0 sin φ cos φ
cos θ cos ψ sin φ sin θ cos ψ − cos ψ sin ψ cos φ sin θ cos ψ + sin φ sin ψ cos θ sin ψ sin φ sin θ sin ψ + cos φ cos ψ cos φ sin θ sin ψ − sin φ cos ψ − sin θ sin φ cos θ cos φ cos θ
These transformations now describe a Roll-Pitch-Yaw.
Velocity vector
Thus to find the inertial velocity vector, we must rotate FROM the body-fixed coordinates to the inertial frame:
dx dt dy dt dz dt
(^) = R 3 (−ψ)R 2 (−θ)R 1 (−φ)
u v w