Nur auf Docsity: Lade robotica industrielle und mehr Grafiken und Mindmaps als PDF für Rechtsmedizin herunter!
Animée par : M.JRHILIFA
2024 - 2025 HESTIM - Hautes Etudes des Sciences et Techniques de l’Ingénierie et du Management Etablissement d’Enseignement Supérieur Privé, Autorisé par le Ministère de l’Enseignement Supérieur et de la Formation des Cadres sous le numéro 245 / 2006
Niveau & Filière : 4 A-GIL
Matière
Robotique Industrielle
Matière : Robotique Industrielle
Classe : 4A GIL
Professeur : ISMAEL JRHILIFA
Année Universitaire : 2024/
Biographie Photo Formation :
- Doctorat en Génie électrique
- Master génie électrique Expériences professionnelles :
- Enseignant vacataire à EMSI Rabat Autres Activités :
- La recherche scientifique Enseignant Permanant à HESTIM
Objectif: Types de robots, les articulations, les degrés de libertés, matrice de
rotation, la cinématique directe, la cinématique inverse.
Répartition du volume horaire :
CM : 17h
TD : 3,5h
TP : 3,5h
Mode d’évaluation: Examen (70%) , TP (30%)
Année Universitaire :2024/ Objectifs du cours
I. Introduction
I. Introduction Les avantages de la robotisation tournent autour de 3 critères :
- Les enjeux économiques : travaille 24/7 sans fatigue, seul ( une fois correctement programmé) => réduction des coûts, amélioration de la qualité des produits (car plus précis et robuste qu’un humain)
- Les enjeux humains: soulage l’employé face à certaines tâches difficiles (charge lourdes, la manipulation de produits toxiques et dangereux), tâches répétitives et rébarbatives.
- Les enjeux environnementaux: optimise une ligne de production (économie des matières premières et diminution des déchets – exemple: robot soudeur qui réalise une soudure parfaite en peu de temps )
I. Introduction
Différents fabricants des robots
II. Définition d’un robot Définition : automate doté de capteurs et d'effecteurs pour exécuter un mouvement sans fatigue, en suivant le même chemin, avec haute précision qui reste inchangée et avec la même finesse => dépasse les capacités d'un être humain (précision, répétabilité, fatigue, force, ...)
- Domaines d'utilisation Robotique industrielle : fabrication de pièces, soudage à l'arc, inspection de production, cobots (utilisés pour assister l'homme) avec différents degrés d'interactivité (attention normes de sécurité) :
- Collaboration directe : travail simultané sur une même pièce
- Collaboration indirecte : travail alterné sur une même pièce
- Coexistence : travail en autonomie sur différentes pièces
- Assistance physique guidée par l'opérateur
- Assistance physique fixée à l'opérateur comme les exosquelettes
II. Définition d’un robot Robot anthropomorphe :
- Ressemble à un bras humain avec divers axes placés en série avec des joints
- Applications infinies
- Avantage : tâches exécutées à haute endurance avec rapidité et précision élevées Robot cartésien :
- Minimum 3 axes perpendiculaires 2 à 2 avec articulations prismatiques
- Couvre un grand rayon d'action, rigide au niveau mécanique et grande précision
- Désavantage : lent et difficilement déplaçable
- Utilisation dans le chargement de grandes machines Structures d’agencement d’axes des robots industriels:
II. Définition d’un robot Structures d’agencement d’axes des robots industriels: Robot Scara :
- 4 axes (parallèles) avec 2 articulations rotoides et une prismatique
- Adapté pour des tâches de montage vertical, manipulation de petits objets (comme pick and place)
- Mouvements précis et peuvent être très rapides
II. Définition d’un robot
II. Définition d’un robot Comment faire bouger le robot dans l'espace afin de ne pas heurter un objet ou un être humain? Cette question concerne la sécurité et la navigation du robot dans son environnement de travail, en évitant les collisions. Comment placer un objet et comment le robot va-t-il prendre cet objet? Cela touche à la manipulation d'objets par le robot, en termes de préhension, de positionnement et de déplacement. Comment faire interagir le robot avec le reste de la ligne de production ou avec un être humain? Cette question aborde l'intégration et la collaboration du robot avec son environnement, que ce soit au niveau de la production ou avec les opérateurs. Les questions à se poser avec ces robots sont:
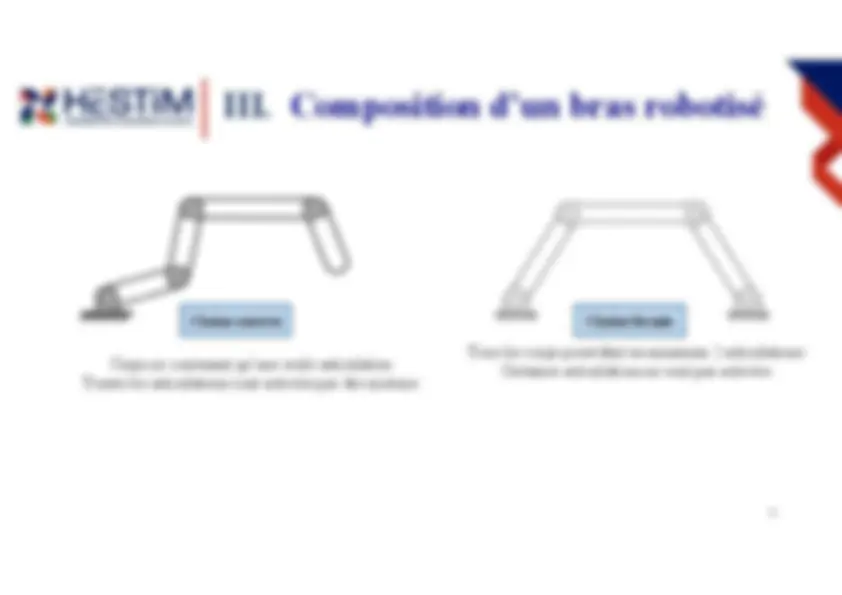
III. Composition d’un bras robotisé Composition d'un bras robotisé: Le bras : composé de corps (= liens) auxquels on peut associer un repère, liés par des articulations (fixes ou mobiles) commandées par des moteurs (pas forcément toutes). Bras robotisé dans le plan avec deux liens (similaire au bras d'un être humain) : Corps mobile Corps mobile Articulation mobile Articulation fixe Corps fixe Pince
III. Composition d’un bras robotisé Corps ne contenant qu’une seule articulation Toutes les articulations sont activées par des moteurs Tous les corps possèdent au minimum 2 articulations Certaines articulations ne sont pas activées Chaine ouverte Chaine fermée