Scarica matlab Lez6 e più Dispense in PDF di Analisi Matematica I solo su Docsity!
Interpolazione polinomiale ed
approssimazione di funzioni.
Approssimazione di funzioni
Interpolazione composita
Spline
Lucia Gastaldi
Dipartimento di Matematica
http://dm.ing.unibs.it/gastaldi/ Lezione 6 (22 ottobre 2003)
Approssimazione polinomiale
Data una funzione
g
continua sun un intervallo chiuso e limitato
[
a, b
]
, poniamo
g ‖ ∞
= max
a ≤
x ≤
b (^) | g ( x ) | .
Sia Teorema di Weierstrass
f
: [
a, b
]
R
una funzione continua sull’intervallo chiuso e
limitato
[
a, b
]
. Allora per ogni
ε >
esiste un intero
n
n ( ε )
e un
polinomio
P
n
di grado
n
tali che:
f (^) ( x ) (^) −
P
n ( x ) ‖ ∞
ε.
1
Errore di approssimazione
Teorema
stima dell’errore di interpolazione
Dati
n
nodi di interpolazione
x i
per
i
= 0
, n
Sia
f
una funzione derivabile con continuit`
a
n
volte in un intervallo
I
contenente tutti i nodi di interpolazione, allora per ogni
x
∈
I
, esiste
un punto
ξ
∈
I
tale che
E
n ( x )
=
f (^) ( x ) (^) −
n ( x ) =
f (^) ( n +1)
ξ )
n
n
i ∏
x
−
x i ) .
2
Funzione di Runge
Si consideri la
funzione di Runge
f (^) ( x
) =
x 2 , x ∈ [
1]
Interpolare con polinomi di grado Esercizio
N
, la funzione
data, usando
N
punti equispaziati nell’intervallo
[
1]
Con-
funzione data e calcolare per ciascun valore difrontare il grafico di ciascun polinomio interpolatore con quello della
N
l’errore
f
−
(^) Π
n ‖ ∞
Soluzione dell’esercizio
errore=norm(abs(yy-px),inf);plot(x,y,’o’)plot(xx,px,’r’)hold onplot(xx,yy)figurepx=polyval(p,xx);p=polyfit(x,y,n);yy=1./(1+25xx.^2);xx=linspace(-1,1);y=1./(1+25x.^2);x=linspace(-1,1,n+1);% % xx punti in cui valutare la funzione e il polinomio% y valori della funzione% x nodi di interpolazione% n grado del polinomio interpolatore function [errore]=Runge(n)
4
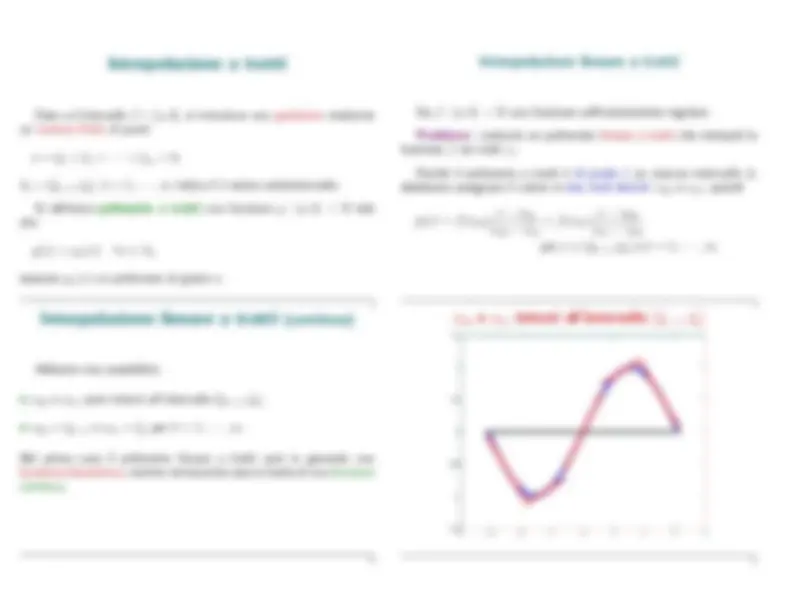
Interpolazione di Chebyshev
Il fenomeno di Runge pu`
o essere evitato utilizzando
opportune
distribuzioni
di nodi.
Nell’intervallo
[
a, b
]
consideriamo i nodi
x i
dati da:
x i
=
a (^) +
b
b
−
a
ˆx i
con
ˆx i =
(^) cos(
n πi
) , i
,... , n.
I punti
ˆx i
si dicono
nodi di Chebyshev
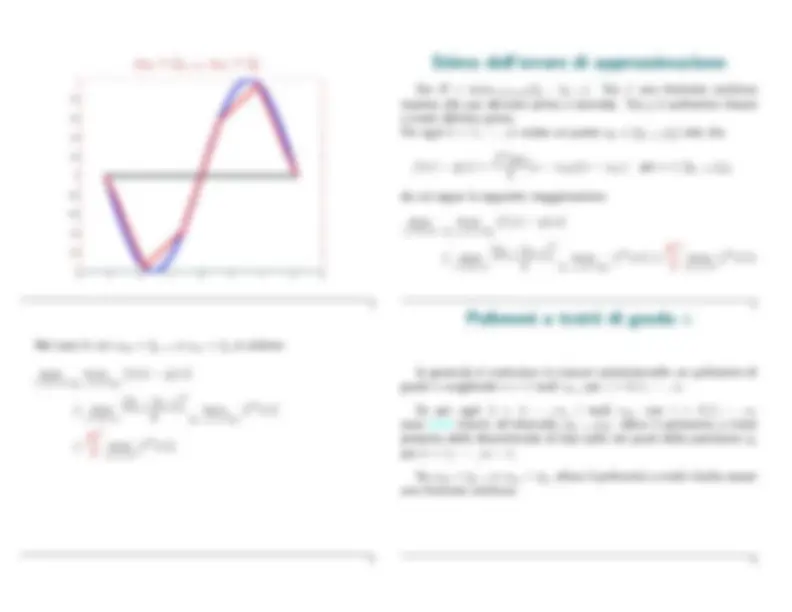
Teorema di Bernstein
Sia
f
: [
a, b
]
R
una funzione continua.
Sia
n
il polinomio interpolatore di grado
n
costruito usando i nodi
di Chebyshev. Allora
lim
n →∞
f − Π n ‖ ∞
5
Esercizio
Data una funzione
f
: [
a, b
]
R
Scrivere una
function
che calcoli il polinomio interpolatore
P
n
di
grado
n
di
f (^) , usando i nodi di Chebyshev e calcoli l’errore
f
−
(^) P
n ‖ ∞
.
Riportare nella stessa figura il grafico della funzione
f
e del polinomio
interpolatore sull’intervallo
[
a, b
]
Input
a,b
estremi dell’intervallo
Input
n
grado del polinomio
Input
f
nome della funzione che si vuole interpolare.
Output
errore
‖ f − P n ‖ ∞.
Per calcolare l’errore usare la funzione
norm
come segue:
norm
vettore
inf
6
Soluzione dell’esercizio
% xn nodi di interpolazione;% f nome della funzione che si vuole interpolare% n grado del polinomio interpolatore% a,b estremi dell’intervallo di interpolazione function [errore]=chebyshev(a,b,n,f)
y valori della funzione
errore=norm(abs(yy-px),inf);plot(xn,y,’o’)plot(xx,px,’r’)hold onplot(xx,yy)figurepx=polyval(p,xx);p=polyfit(xn,y,n);x=xx; yy=eval(f);xx=linspace(a,b);x=xn; y=eval(f);endxn(i)=ab2-bamcos(pi(i-1)/n);for i=1:n+1ab2=(a+b)/2; bam=(b-a)/2;%% xx punti in cui valutare la funzione e il polinomio
7
x k 0 = ξ k
− 1 , x k 1 = ξ k
12
Stima dell’errore di approssimazione
Sia
H
= max
1 ≤
k ≤ m
( ξ k
−
ξ k −
1 ) .
Sia
f
una funzione continua
insieme alle sue derivate prima e seconda. Sia
g
il polinomio lineare
Per ognia tratti definito prima.
k
= 1
, m
esiste un punto
η k
∈
[
ξ k − 1 , ξ
k ]
tale che
f (^) ( x
) −
g ( x ) =
f (^) ′′ ( η k )
x
−
x k 0 )(
x (^) −
x k 1 )
per
x
[
ξ k −
1 , ξ
k ] ,
da cui segue la seguente maggiorazione:
max
1 ≤
k ≤
m
max
ξ k − 1 ≤ x ≤
ξ k | f (^) ( x ) (^) −
g ( x ) |
max
1 ≤
k ≤
m
ξ k
−
(^) ξ
k −
1 ) 2
max
ξ k − 1 ≤ x ≤
ξ k | f (^) ′′ ( x ) | ≤
H
2
max
a ≤
x ≤
b (^) | f (^) ′′ ( x ) | .
13
Nel caso in cui
x k 0
=
ξ k − 1 e x k 1 = ξ k
si ottiene:
max
1 ≤
k ≤
m
max
ξ k − 1 ≤ x ≤ ξ k | f (^) ( x )
−
(^) g
( x
) |
max
1 ≤
k ≤
m
ξ k
−
ξ k −
1 ) 2
max
ξ k − 1 ≤
x ≤ ξ k | f (^) ′′ ( x ) |
H
2
max
a ≤
x ≤
b (^) | f (^) ′′ ( x ) | .
14
Polinomi a tratti di grado
n
In generale si costruisce in ciascun sottointervallo un polinomio di
grado
n
scegliendo
n
nodi
x ki
, per
i
= 0
, n
Se
per
ogni
k
, m
i
nodi
x ki
,
con
i
, n
sono
tutti
interni all’intervallo
[
ξ k −
1 , ξ
k ] , allora il polinomio a tratti
presenta delle discontinuit`
a di tipo salto nei punti della partizione
ξ k
per
k
, m
Se
x k 0
=
ξ k −
1
e
x kn
ξ k , allora il polinomio a tratti risulta essere
una funzione continua.
15
Polinomi a tratti (le funzioni di base)
Si pu`
o costruire una base per i polinomi a tratti usando lo stesso
principio usato per i polinomi di Lagrange.
Fissato un nodo
x ki
per l’interpolazione a tratti, la corrispondente funzione di base
g ki
soddisfa:
g ki
( x `j
) =
se
` = k e j = i
se
`
k
o
j
6
i.
La function
base
disegna nell’intervallo
[
1]
(diviso in due parti)
le funzioni di base polinomiali a tratti continue di grado
n
. Si richiama
>> base(3)con il seguente comando:
16
Spline
Siano
x i ,
per
i
, n
n
nodi
distinti
e
ordinati
sull’intervallo
[
a, b
]
, tali che
a
=
x 0
< x
1
<
< x
n
=
b .
La funzione
s m
: [
a, b
]
R
`e una
funzione spline
di grado
m
relativa ai nodi
x i
se
s m
( x )
per
x
∈
[
x i −
1 , x
i ] , i
= 1
, n
, `
e un polinomio di grado
m
La funzione
s m
`e
continua
sull’intervallo
[
a, b
]
insieme alle sue
derivate fino all’ordine
m
La spline
s 1
`e una funzione lineare a tratti continua.
La spline pi`
u usata `
e la
spline cubica
s 3 .
17
Costruzione della spline cubica interpolante
Dati
n
punti distinti
x i , f
x i ))
, la spline cubica interpolante
si ottiene imponendo le seguenti condizioni:
s 3 ( x i ) =
f (^) ( x i )
per
i
= 0
, n,
lim
x →
x i−
s 3 ( x ) =
lim
x →
x i+
s 3 ( x ) ,
lim
x →
x i−
s 3 ′ ( x ) =
lim
x →
x i+
s 3 ′ ( x ) ,
lim
x →
x i−
s 3 ′′ (^) ( x ) =
lim
x →
x i+
s 3 ′′ (^) ( x ) .
Oss
le incognite sono
n
(4 coefficienti per ciascun intervallo
[
x i − 1 , x
i ] ). Le equazioni sono
n
n
(^) + 1
passaggi per i punti e 3
condizioni di continuit`
a in ciascun punto interno).
Restano libere 2
seconda si annulli negli estremi dell’intervallo (incognite che vengono fissate imponendo, ad esempio, che la derivata
s 3 ′′ (^) ( a ) =
s 3 ′′ (^) ( b ) = 0
); in
questo caso si parla di
spline cubica naturale
18
Le funzioni MATLAB per l’interpolazione
Funzione
Significato
interp
Interpolazione in una tabella di punti (1D).
interp1q
Interpolazione lineare (1D).
interpft
Interpolazione mediante il metodo FFT.
interp
Interpolazione in una tabella di punti (2D).
interp
Interpolazione in una tabella di punti (3D).
spline
Spline cubica interpolante.
griddata
Interpolazione e fitting per superfici.
19