Download Lateral Stability Analysis of an Airplane: Solution Equations and Roots and more Exercises Differential Equations in PDF only on Docsity!
Cn
cm
m
)“
.1, ;/. /.’. —.^ ‘. (^) , ~,
FOR AERONAUTICS
TECHNICAL NOTE 2129
METHOD OF CALCULATING THE LATERAL
BASED ON THE LAPIACE TRA~FORM
;*
By Harry E. Murray and &ederic<&.&.$Grant
t
OF AIRCRAFT
.2: -.: 4
Langley Aeronautical:’Labora/~yh.
Langley Air Force Base, Va*J~.‘:
Washington
July 1950
.-. -.. .— .. ..- ...... ... .—, -.... .._ ....... .. .... ... ----- (^). —..
TECHLIBRARYKAFB,NM
“ Iullllfll[l!loulnil
NATIONAL ADVISOFCfCOMMITTEE FOR AERONAUTIC 00L537a
TEamcfi Nom 2x
METHOD OF CALCULATING THE LATERAL MOTIONS OF AIRCRAFT
HASED ONTHE
By Hsrry E. Murray
LAJ?LACETRANSFORM
and Frederick C. Grant
SUMMARY
The lateral motions of aircraft are obtained by mgans of the Laplace tiansfomn which gives solutions expressed in terms of elementary functions for “thefree and forced motions. These equations permit the calculation of the free motion of an aircraft following any initial condition or the fprced motion following the application of constant external forces and moments. These forced motions can be used to obtain by means of Duhamel’s integral the response to any srbitrsry forcing function. All the classical stability concepts can be^ deduced from these same solution equations largely by inspection. These equations for the lateral motion are applied to the calculation of the lateral stability of a specific airplane and to the calculation of certain of its free and forced motions. (^)..
INTRODUCTION
The lateral motions of aircraft are represented by three simultaneous differential equations which are generally assumed to be line=. The fundamental problem of lateral dynsmics involves the solution of these differential equations in terms of the aerodynamic and mass parameters of the airplane. The solutions can thenbe used to obtain numerically the motion of the airplane as a function of time.
The recent application of the Laplace transform to the solution of systems of linear differential,equationspermits a more general analysis of the problem of airplane motion than that of,reference 1, which is based upon Heaviside’s operational calculus. Heaviside’s operational calculus permits a calculation of the forced motion, which is the motion following the application of external forces and moments. The Laplace transform permits these same calculations and also permits the direct calculation of the free motion, which is the motion following finite initial values of the variables and their first derivatives in the
.
NACA TN 2129
comIcIENTs ANDSYMBOLS
c~
Cn
% w L. M N Y
Hr
s b 7 a e P v m g
trti lift coefficient (W cos 7/@)
rolling-moment coefficient (L/q%)
yawing-moment coefficient (I?/qSb)
lateral-force coefficient (Y/@)
airplane weight, pounds
rolling moment
pitching moment
yawing moment
lateral force
aileron hinge tint ‘
elevator hinge moment
rudder hinge moment
dynamic pressure (PV2/2)
whg area, square feet
wing span, feet
..
inclination of flight path to,horizontal (positive in clinib),degrees . angle of attack, degrees (^) #
angle of pitch, degrees
mass densi~ of air, slugs per ctiic foot
free-stream veloci~, feet per second
airplane mass, sl~s (^) (w/g)
acceleration due to gravity, feet per second per second
...—. ...—.._— .________ . (^) ~— .—_____ _
4 mcA TN 2129
%
t
P
r
nondimensional
time, seconds
inclination of
time (tVfi)
principal longitudinal axis of inertia (positive for axis above flight path at nose), degrees
airplane
angle of
angle of
relative-density factor (m/pSb)
r)
t bank, radians p at o
yaw or azimuth, radians (^) (r’r t’)
rolling veloci~ about stabili~ X-tis, radians per second
yawing velocity about stability Z-axis, radians per second
angle of side81ip, radians
rolling-moment coefficient of forcing-function couple in roll
yawing-mconent in yaw
lateral-force
coefficient of
coefficient of
@eriods of oscilhtory modes,
—
forcing-function couple
lateral forcing function
seconds
times to damp to half-amplitude of oscillatory modes, seconds
cycles to damp to half-amplitude of oscillatory modes
aileron deflection, degrees
rudder deflection, degrees
.
.
-. —^ — -.—
A,B,C,D,E
R
A19A2>A39A4>A5>A
%YB2YB3P4JJ5)B
cl,c2,c3,c4,c
RA
1A
RB
IB
RA’
1A‘
RB’
IB’
NAcflmf ZL
hagiaary part of L1 and ~ when Al and ~ are complex conjugates
coefficients of stability quartic
Routh’s discriminant
amplitude coefficients for @
amplitude coefficients for ~
amplitude coefficients for j
real part of A3 and A4 when X3 and
complex conjugates
imaginary & of A3 and A4 when A
are complex co~ugates
real part of B3 and B4 when X3 and
complex conjugates
Kpt of B3 and^ B4^ when^ X
=e complex conjugates
real part of C3 and C4 when X3 and
complex conjugates
haginary part of C3 and C4 when X
are complex co~ugates
real part of Al and A2 when Al and complex conjugates
~i~prt of Al and A2 when Xl sre complex conjugates
real part of B1 and ~ when L1 and complex conjugates
imagidary @t of Bl and B2’when Xl and ~
. sre complex conjugates
.
—.
.
~. —.--——
mcA m 2129
,
%’
Ic ‘
real part of Cl and C2 when Al and ~ are complex conjugates
, haginary^ ~rt^ of^ Cl^ and^ C2^ when^ Xl^ and^ ~ are complex conjugates
for @ oscillation corre-
conjugate roots X3 and ).
KA amplitude coefficient
spending to complex
(2 +-)
KB (^) amplitude coefficient spending to complex , %
for ~ (^) oscillation corre-
conjugate roots A~ and A
.($^2 B2^ + IB2 ) Kc wnplitude coefficient spending to complex
for !3 oscillation corre- conjugate roots X3 and ~
$
KA’ , (^) for @ oscillation corre- conjugate roots Al and L
amplitude coefficient spending to complex
“ (2$-)
KB’ (^) amplitude coefficient for * oscillation corre- spending to complexconjugate roots Al and ~
(2V$-)
“Kcl anylitude coefficient
spending to complex
for ~ oscillation corre. conjugate roots Xl and X
phase angle for @ conjugate complex
% oscillation corresponding to
‘( )
tan-l Q RA
phase angle for * conjugate complex
oscillation corresponding to
roots X3 and X4, radians
()
tin-l Q RB
-, .
—. ... --. — —.- .-. ..— __ .____ —_— —........ ... __ —— —
NACA TN 2129 9
&y Cyr = —
()
a$
.
acy cy=—
P ap
b@blYb2Yb3)b4)b /
Subscripts:
a
coefficients appearing in numerator terms of ampli- tude coefficients for @
coefficients appearing in numerator terms of smpli- tude coefficients for ~
coefficients appearing in numerator terms of ampli- tude coefficients for ~
initial value
transformed variable
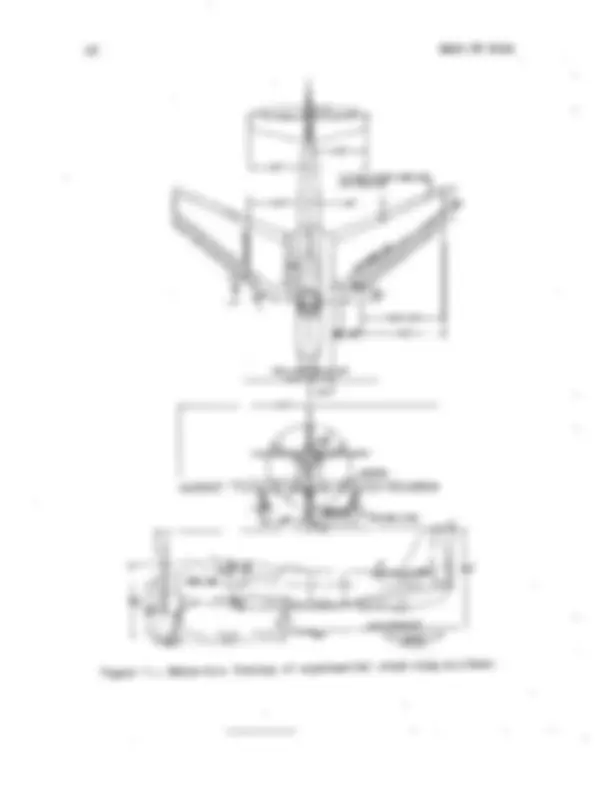
The linear equations of in figure 1 and representing
ANALYSIS
motion, referred to the -s system shown the lateral motion of an airplane are
..— - — -.— -—-- —.-—.-..-.— -— —.-———---—-—-—--- - ——-- .—
10 NACA TN^2129
2L9J+#-cy==o
,.
The terms Czc, c%) ad Cyc^ are forcing functions which represent disturbances tiposed upn the state of motion of the airplane by control movement or a-spheric turbulence. These terms, in general, are arbi- trary functions of time, but^ for the purpose of this analysis, they are considered to be constants applied at zero time. After a solution has “ been obtained in terms of constant forcing quantities this solution can be used to obtain a new solution for an arbitrary forcing function by Duhamel’s integral as explained %n references 4 and 5.
, Transformation of Equations
~n the Laplace transform is applied (reference 6, p. 8), the 0 transformed equations become after multiplying throughby a Y
(wxq(w$l + (&&z.) (%$0+ Czc
}
(2a)
,
— —–—. ---.—- —^ —–..——
12
and the constants are given by
(1 D
Kx^2 K=’
‘Xz %
NACA TN 21.
.
.
——— .-. ..—^ -.^ —-.^ ———.^
NACA TN 2129”
\l CYp^ o^ cYr
H)
Czr Clc
P%C
Ilr Cnc
.
———— .——^ -^ ...—.^ —^ -— —-—
NACA TN 2129 15
E=
o
cl P Cnp
1
Czr
c (^) Ilr
t-any
expression for
bou5 + blak + b2a3 + b3a2 + b~ + b~
u a2A
where the comtants are given by
(
b. = ~ 8%3 ‘X
‘z
bl =
*()2Pb
%z KZ
Km
KZ
1
cZr
%r
.2cyf
cl _ 2%2 P Cnp
KZ
— .——-. ——-—.-—---——----—- —.. ._—^ .—. —.—-..——^ .—
.
16 NACA TN^2129
.
-D2 =
(
Czp
(WOO-2%
Cnp
II
CZP KX2 +
c% ‘z
(1 I
o KX2^ Kxz^ Czp^ Clp^ Czr
_o i% c% cnp Cnr ‘h” ‘XZKZ2 -_*
%p CYP w.
Cyp Cyp Cyr
,
)
+
(1 (l
Cz CZC %?
c~ Czp P
H)
Czc C2P
POW) p +2~c%cncK~+k
c%c%
c% (^) Cnp Cy 47yc o $
.
.
——. —...
.
18.^ NACA TN^2129 ~
.
K= Cz hr
I ‘1) (
Czp Km P ~ t= 7CL (^) + (woo * Kz2 C c~r + Cnp KZ
np
o. Cyp Cyr (^4)
K=* Cz Km P
Czp Czr 21# Km c KZ ‘P
1 -2 tan 7CL O
c% Cnr
o K+ Km Czc Czp Czr
Kx2 Czc -~ (^) C% Cnp Onr (^) -% “o Km $2 - 4% Km C% c,= c, Cyr c,= ‘c, Cyr P P
.
.
.
.
_ ——. — —^ —^ .—
.
NACA TN 2129
.
(
C3 = do &L
All the determinants given in this paper are expanded in the appendix. (^).
In order to obtain the actual variables @, 4, and ~ from the transformed variables an inverse LaPlace transformation must be applied to %v 4U, and^ Ba.^ The expressions for^ !%, ~a, and 1% we Of the form pa/~ where pa and ~ are polynomials, the degree of ~ being higher than that of pa. Reference 6, inverse transform of a function of this type used hefein)
This equation assumes all the roots & of
page 45, indicates that the
is (in terms of the variables .
~ = O to be distinct. All roots of ~ = O are distinct for 13a;however,”for @a. and Vgj ~ = O has double zero roots. (^) (See equations (3), (5), and (6).) The.
. ..
. ---- .——.-—-. -—___ _—_____ __ - ___ . __ . __ (^) —— .. (^) —... _ __ _ .