Download 2. State Space Search and more Study notes Artificial Intelligence in PDF only on Docsity!
Introduction to Artificial Intelligence
2. State Space Search
Prof. Jan Snajderˇ Assoc. Prof. Marko Cupi´ˇ c Prof. Bojana Dalbelo Baˇsi´c
University of Zagreb Faculty of Electrical Engineering and Computing
Academic Year 2021/
Creative Commons Attribution–NonCommercial–NoDerivs 3.0 v3.
Motivation
Many analytical problems can be solved by searching through a space of possible states Starting from an initial state, we try to reach a goal state Sequence of actions leading from initial to goal state is the solution to the problem The issues: large number of states and many choices to make in each state Search must be performed in a systematic manner
Formal description of the problem
Let S be a set of states (state space) A search problem consists of initial state, transitions between states, and a goal state (or many goal states)
Search problem
problem = (s 0 , succ, goal) (^1) s 0 ∈ S is the initial state (^2) succ : S → ℘(S) is a successor function defining the state transitions (^3) goal : S → {>, ⊥} is a test predicate to check if a state is a goal state
The successor function can be defined either explicitly (as a map from input to output states) or implicitly (using a set of operators that act on a state and transform it into a new state)
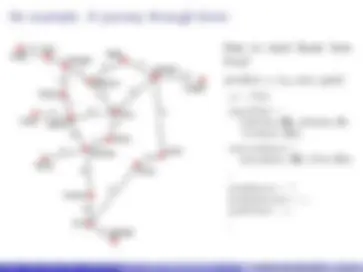
An example: A journey through Istria
How to reach Buzet from Pula? problem = (s 0 , succ, goal) s 0 = Pula succ(Pula) = {Barban, Medulin, Vodnjan} succ(Vodnjan) = {Kanfanar , Pula} .. . goal(Buzet) = > goal(Motovun) = ⊥ goal(Pula) = ⊥ .. .
Another example: 8-puzzle
initial state:
goal state:
What sequence of actions leads to the goal state? problem = (s 0 , succ, goal) s 0 =
succ( ) =
goal( ) = >
goal( ) = ⊥
goal( ) = ⊥ .. .
State space search – the basic idea
State space search amounts to a search through a directed graph (digraph) graph nodes = states arcs (directed edges) = transitions between states Graph may be defined explicitly or implicitly Graph may contain cycles If we also need the transition costs, we work with a weighted directed graph
State space vs. search tree
Search tree is created by searching through the state space Search tree can be infinite even if the state space is finite NB: state space contains cycles ⇒ search tree is infinite
State vs. node
Node n is a data structure comprising the search tree A node stores a state, as well as some additional data:
Node data structure
n = (s, d) s – state d – depth of the node in the search tree
state(n) = s, depth(n) = d
initial(s) = (s, 0)
Node expansion
When expanding a node, we must update all components stored within it:
Node expansion
function expand(n, succ) return { (s, depth(n) + 1) | s ∈ succ(state(n)) }
The function gets more complex as we store more data in a node (e.g., a pointer to the parent node)
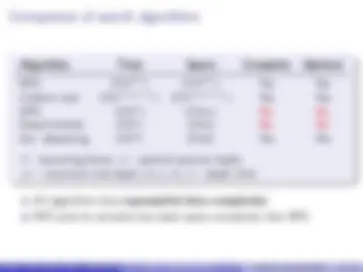
Comparing problems and algorithms
Problem properties: |S| – number of states b – search tree branching factor d – depth of the optimal solution in the search tree m – maximum depth of the search tree (possibly ∞) Algorithm properties: (^1) Completeness – an algorithm is complete iff it finds a solution whenever the solution exists (^2) Optimality (admissibility) – an algorithm is optimal iff the solution it finds is optimal (has the smallest cost) (^3) Time complexity (number of generated nodes) (^4) Space complexity (number of stored nodes)
Search strategies
There are two types of strategies: Blind (uninformed) search Heuristic (directed, informed) search
Today we focus on blind search.
Blind search
(^1) Breadth-first search (BFS) (^2) Uniform cost search (^3) Depth-first search (DFS) (^4) Depth-limited search (^5) Iterative deepening search
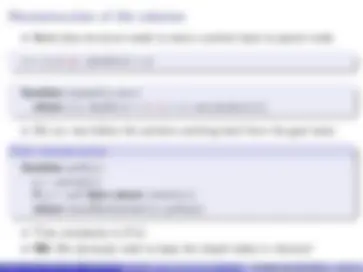
Breadth-first search – implementation
We get the BFS strategy if we always insert the generated nodes at the end of the open nodes list
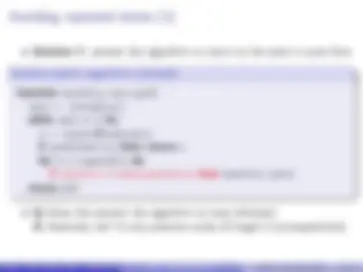
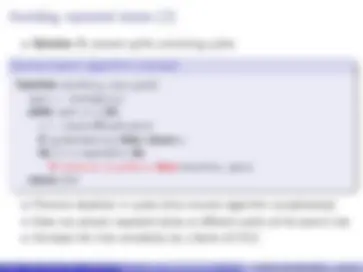
Breadth-first search
function breadthFirstSearch(s 0 , succ, goal) open ← [ initial(s 0 ) ] while open 6 = [ ] do n ← removeHead(open) if goal(state(n)) then return n for m ∈ expand(n, succ) do insertBack(m, open) return fail
List open now functions as a queue (FIFO)
Breadth-first search – example of execution
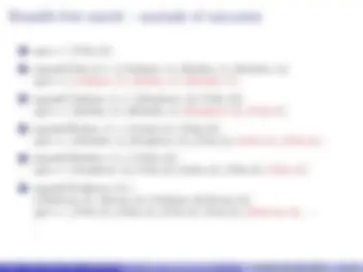
(^0) open = [ (Pula, 0) ] (^1) expand(Pula, 0) = {(Vodnjan, 1), (Barban, 1), (Medulin, 1)} open = [ (Vodnjan, 1), (Barban, 1), (Medulin, 1) ] (^2) expand(Vodnjan, 1) = {(Kanfanar , 2), (Pula, 2)} open = [ (Barban, 1), (Medulin, 1), (Kanfanar , 2), (Pula, 2) ] (^3) expand(Barban, 1) = {(Labin, 2), (Pula, 2)} open = [ (Medulin, 1), (Kanfanar , 2), (Pula, 2), (Labin, 2), (Pula, 2) ] (^4) expand(Medulin, 1) = {(Pula, 2)} open = [ (Kanfanar , 2), (Pula, 2), (Labin, 2), (Pula, 2), (Pula, 2) ] (^5) expand(Kanfanar , 2) = {(Baderna, 3), (Rovinj , 3), (Vodnjan, 3)(Zminj , 3)} open = [ (Pula, 2), (Labin, 2), (Pula, 2), (Pula, 2), (Baderna, 3),... .. .