Download Pseudo Controls Method for Cooperative Airplane Operation: A Case Study on HARV and more Lecture notes Design in PDF only on Docsity!
NASA/TP- 1998-
A Method for Integrating Thrust-Vectoring and
Actuated Forebody Strakes With Conventional
Aerodynamic Controls on a High-Performance
Fighter Airplane
Frederick J. Lallman, John B. Davidson, and Patrick C. Murphy
Langley Research Center, Hampton, Virginia
National Aeronautics and
Space Administration
Langley Research Center
Hampton, Virginia 23681-
September 1998
The use of trademarks or names of manufacturers in the report is for accurate reporting and does not constitute[ an official endorsement, either expressed or implied, of such products or manufacturers by the National[ Aeronautics and Space Administration. I
Available from the following:
NASA Center for AeroSpace Information (CASI) 7121StandardDrive Hanover, MD21076- (301) 621-
National Technical Information Service (NTIS) 5285 Port Royal Road Springfield, VA 22161- (703) 487-
I'll
'I_ I
Abstract
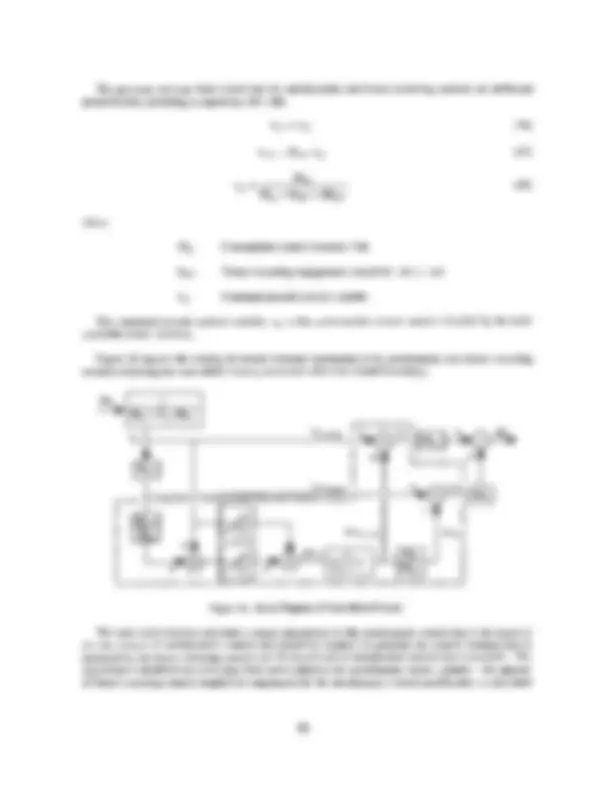
A method, called pseudo controls, of integrating several airplane controls to achieve cooperative operation is presented. The method eliminates conflicting control motions, minimizes the number of feedback control gains, and reduces the complication of feedback gain schedules. The method is applied to the lateral directional controls of a modified high-performance airplane. The airplane has a conventional set of aerodynamic controls, an experimental set of thrust-vectoring controls, and an experimental set of actuated forebody strakes. The experimental controls give the airplane additional control power for enhanced stability and maneuvering capabilities while flying over an expanded envelope, especially at high angles of attack.
The flight controls are scheduled to generate independent body-axis control moments. These control moments are coordinated to produce stability-axis angular accelerations. Inertial coupling moments are compensated. Thrust-vectoring controls are engaged according to their effectiveness relative to that of the aerodynamic controls. Vane-relief logic removes steady and slowly varying commands from the thrust- vectoring controls to alleviate heating of the thrust turning devices. The actuated forebody strakes are engaged at high angles of attack.
This report presents the forward-loop elements of a flight control system that positions the flight controls according to desired stability- axis accelerations. This report does not include the generation of the required angular acceleration commands by means of pilot controls or the feedback of sensed airplane motions.
Summary
The pseudo controls method for integrating lateral/directional aerodynamic and thrust-vectoring controls on fighter-type jet airplanes is presented. The NASA High-Alpha Research Vehicle (HARV) discussed in this report is a modern high-performance twin-engine jet fighter that is modified to carry an experimental thrust-vectoring apparatus and an experimental set of actuated forebody strakes. The experimental controls augment the conventional aerodynamic controls (ailerons, twin rudders, and a horizontal stabilator capable of differential deflections) to extend the flight envelope to high angles of attack and slow airspeeds.
The purpose of the pseudo controls method is to integrate the conventional aerodynamic controls with experimental thrust-vectoring and actuated forebody strake controls. The pseudo controls method organizes the aerodynamic and thrust-vectoring control activity to cause moments about the airplane axes that satisfy the demands of stability augmentation feedback loops, pilot commands, and inertial decoupling. The pseudo controls method converts stability-axis roll and yaw angular acceleration commands into coordinated control deflections. This reduces the number of commanded items from the
number of controls available to commanded roll and yaw accelerations and simplifies the task of the designer of the feedback part of the control system. The acceleration commands are generated from pilot control inputs and stabilizing feedback sensor signals. This may be accomplished by any accepted control law design method and is not addressed in this report. The acceleration commands are distributed
Figure I. The High Angle-of-Attack Research Vehicle (HARV)J
(St. Louis, MO) and the Northrop Corp. (Newbury Park, CA) and was previously used for high angle of attack and spin testing. The HARV was powered by two General Electric (Lynn, MA) F404-GE- afterburning turbofan engines.
Several modifications were made to the airplane to prepare it for flight tests (references 4 and 5). A research flight control system (RFCS) using Pace 1750A computers (Performance Semiconductor Corp., Sunnyvale, CA) was added to the airplane avionics. Research control laws and flight test software were programmed in the RFCS computers. An emergency spin recovery parachute assembly was mounted to the upper aft portion of the airplane between the engines. High angle-of-attack in-flight flow visualization and pressure measurement equipment was installed. Flight-test instrumentation and real- time air-to-ground data links were installed. Various indicators, switches, etc., were provided in the cockpit to allow the pilot to monitor and control the special flight test equipment.
Turning vanes were added to the HARV to provide thrust-vectoring capability (figure 2). In order to accommodate the vane installation, the engines were modified by removing the divergent flap portion of the nozzle. The convergent nozzle hardware was modified to maintain structural integrity and the engine controller was modified to increase the engine stall margin. The inside trailing edges of the stabilators were modified slightly to provide clearance for the thrust-vectoring hardware.
Three vanes were positioned about the periphery of each engine nozzle. The vanes were made of Inconel 625 ® steel and each was moved by a modified aileron electrohydraulic actuator. The larger top vanes generate nose-down pitching moments, while the smaller lower (inboard and outboard) vanes moved collectively to generate nose-up pitching moments. Other combinations of vane positions were designed to cause the generation of yaw and rolling moments.
In order to initially evaluate the vectoring capability and isolated nozzle performance of the thrust- vectoring system, a static (wind-off) test was conducted on a 14.25 percent scaled model, Vane sizes and actuation geometries were tested over a range of deflections and nozzle pressure ratios with military- power and afterburning-power nozzles. The test examined the effects of vane deflections on thrust vectoring and resultant thrust losses. The test results favored the simple rotating vane actuation system that was implemented on the HARV airplane over a more complicated translating-rotating vane concept (reference 6).
Iphotographs supplied by NASA Dryden Flight Research Center, Edwards, CA. ®Inconel 625 is a registered trademark of Huntington Alloy Products Division, International Nickel Co., Huntington, WV.
Figure2. HARVThrust-VectoringSystem.
A wingtip-supported,partiallymetric,0.10-scale(cold)jet-effectsmodelofanF-18prototypeaircraft
wasmodifiedwith hardwareto simulatethethrust-vectoringcontrolsystemof theHARV. Afterbody
aerodynamicandthrust-vectoringforcesandmomentsweremeasuredat free-streamMachnumbers
rangingfrom0.30to0.70,atanglesof attackfrom0° to70°,andatnozzlepressureratiosfrom1.0to 5.
with afterburningandmilitary powernozzles(reference7). Thesedatawereusedto designa
Mixer/Predictorprogramthatcouldpositionthevanesto getcommandedpitch,yaw,androll moments
(reference8). TheHARVexperimentsusedpitchandyawthrust-vectoringmomentstomaintainstable
flightathighanglesof attack.Theroll thrust-vectoringcapabilitywasnotusedin theflighttestprogram
becausethe roll momentsproducedwerelimitedby priority logic in the Mixer/Predictorprogram.
Figure3showsthethrust-vectoringsystemdeflectingenginethrustduringapropulsionsystemtest.
Figure3. HARVThrust Vectoring Test.
The HARV airplane initially flew with thrust-vectoring controls during 1991. A flight test program established the utility of thrust-vectoring controls and demonstrated controlled, maneuvering flight at post-stall angles of attack. The flight control law used at that time was developed jointly by NASA and McDonnell Aircraft Company. A second thrust-vectoring control law, known as the NASA-1A control
-'1 II
deflectionsandpitch,axisthrustvectoringtoachieverapid(agile)pitchingmotionstocommandedangles
of attack.Theleading-edgeandtrailing-edgeflapsfollow the schedulesof the productionFIA-
airplane.Thelateral/directionalcontrollerusedstability-axisroll andyawangularaccelerationsto
controlstability-axisroll rateandsideslipangle.Feedbackcontrolgainscheduleswerecalculatedusing
directeigenspaceassignmentwithtradeoffsamongcontrolpower,robustness,agility,andflyingqualities
metrics(reference14).Thecontrollawswereprogrammedin theFORTRANprogramminglanguagefor
ground-basedtesting.A simulationprogramof abaselineF/A-18airplane(reference15)wasmodifiedto
representtheHARVairplaneincludingtheTVCSandANSERcontrols(reference16). Testingof these
programswasperformedby anACSL(AdvancedContinuousSimulationLanguage,reference17)batch-
modesimulation.Pilotedevaluationof theHARVairplaneandtheANSERcontrollawswasconducted
in theDifferentialManeuveringSimulator(DMS)atNASALangleyResearchCenter(reference18).
TheDMSis a fixed-basedsimulatorhavingwide-anglevisualdisplaysandis capableof simulatingtwo
airplanesastheymaneuverrelativetoeachother.Theevaluationsusedaseriesof pilotingtasksdesigned
totestthelongitudinalandthelateral/directionalcontrolsystemsthroughouttheHARVflight envelope
(reference12). TheANSERcontrollawswereinstalledin theRFCScomputersonboardtheHARV
airplaneandhardware-in-the-loopsimulationsatNASADrydenFlightResearchFacility.Theflighttests
weredesignedto provideaerodynamicmeasurements,flowfieldvisualizations,airplanecontrollability,
andagility ratings. Theseflight testswereconductedfrom 1995to 1996at NASA DrydenFlight
ResearchFacility.
Onechallengeof theANSERcontrolsystemwastodeterminehowtobestschedulethemanycontrol
effectors,especiallyathighanglesof attack.Theorganizationof thesecontrolstoprovideindependent
channelsof control of lateraland directionalmotionsthroughoutthe flight test envelopewas
accomplishedby usingthepseudocontrolsmethod.An earlyversionof thepseudocontrolsmethodis
describedin references19and20for a jet fighterconfigurationhavingroll andyawthrust-vectoring
capabilitiesin additionto ailerons,rudder,anddifferentialhorizontaltail availablefor control. The
controlswerecoordinatedto formonecontrolchannelthataffectedtheDutchroll modeandanother
channelthataffectedtheroll andspiralmodesof theairplane(reference19).Thismethodwasapplied
overa rangeof trimmed,levelflight conditionsto produceschedulesthatdistributedtheindividual
channelcommandsamongthefourcontroleffectors.Feedbackloopswereaddedandbatchsimulation
resultsdemonstratedpromisingresults.Lateralcontrolstickdeflectionscausedstability-axisroll rates
withsmallDutchroll excitationandrudderpedaldeflectionscausedsteadysideslipswith smallsteady-
stateroll rates(reference20).
Thepseudocontrolsmethodwasapplied to the mathematical model of the HARV airplane as a way of
coordinating all its lateral/directional controls and reducing the number of feedback control channels. For the HARV airplane, an envelope was defined over a wide range of angle of attack, Mach number, and engine thrust settings without reference to trimmed flight. Unfortunately, the calculated distributions were very sensitive at some conditions and it was felt that the scheduling of the results of the early pseudo controls method would be impractical for the HARV airplane. The pseudo controls method was modified for use on the HARV airplane. The lateral and directional control channels were configured to produce stability-axis accelerations instead of affecting the dynamic modes of motion as was previously attempted. The remainder of this report provides a detailed description of the modified pseudo controls method as it was implemented on the HARV airplane.
-171!
Symbols and Nomenclature
Numerical values, where given, are nominal values for the HARV airplane.
Symbol Value Unit Description
ANSER - - Actuated Nose Strakes for Enhanced Rolling AOA - degree angle of attack ay - ft/sec 2 lateral acceleration at the sensor location
acg - ft/sec 2 lateral acceleration at the center of gravity ay,corr - ft/sec 2 lateral accelerometer correction ay,TV -- ft/sec 2 interference of thrust vectoring on lateral per ft-lb accelerometer ay,F S - ft/sec 2 interference of actuated forebody strakes on lateral per fi-lb accelerometer b 37.42 ft wing span ------4 - ft-lb 3-vector of roll moments Croll
Cyaw -- ft-lb 3-vector of yaw moments
d -^ -^ solution^ of optimization^ problem c.g. - - center of gravity C18a - deg -1 aileron roll control derivative Cj_ - deg -! differential tail roll control derivative C18 r -- deg -! rudder roll control derivative Cn8 a - deg -1 aileron yaw control derivative
Cn&1 - deg -1 differential tail yaw control derivative Cn8 r - deg q rudder yaw control derivative Croll -- -- aerodynamic roll moment coefficient available from conventional controls
Cyaw - - aerodynamic yaw moment coefficient available from conventional controls CRAFT Control power, Robustness, Agility, and Flying qualities Tradeoffs ---" - - roll distribution 3-vector droll
dyaw - yaw distribution 3-vector
Faero - pound lateral aerodynamic force including conventional controls FFs - pound lateral force of actuated forebody strakes FTV - pound lateral thrust-vectoring force HARV - - High-Angle-of-Attack Research Vehicle
Symbol Value Unit Description
lbs,max - rad/sec 2 maximum stability-axis roll acceleration q - rad/sec body-axis pitch rate
- lb/ft2 dynamic pressure r - rad/sec body-axis yaw rate f - rad/sec 2 body-axis yaw acceleration rcmd rad/sec 2 commanded body-axis yaw acceleration fmax - rad/sec (^2) body-axis yaw acceleration capability rad/sec 2 stability-axis yaw acceleration S 400 ft 2 reference wing area STV 0 tO 1 thrust-vectoring engagement variable
STV r 0 tO 1 roll^ TV^ engagement^ variable
STvy 0 to 1 yaw^ TV^ engagement^ variable T - lb total engine thrust T c - sec vane^ relief^ filter^ time^ constant^ § TED - - trailing edge down TEU - - trailing edge up TV - - Thrust Vector __-) U
3-vector of normalized control deflections
V (^) ft/sec velocity v A -1 to +1 aerodynamic^ pseudo^ control^ variable^ §
VA,no m -- 1 to + 1 nominal^ aerodynamic^ pseudo^ control^ variable^ § v C -1^ to^ +1^ command^ pseudo^ control^ variable^ § Vdir rad/sec^^2 directional^ pseudo^ control^ variable Vlat rad/sec^2 lateral^ pseudo^ control^ variable Vroll -1^ to^ +1^ roll^ pseudo^ control^ variable vTV -1 to +1 - thrust-vectoring pseudo control variable §
vTV,nom -1 to +1 - nominal thrust-vectoring pseudo control variable §
Vyaw -1 to +1 - yaw pseudo control variable W - (ft-lb) 2 (3x3) matrix (products of moment coefficients) ct - degree angle of attack ACI8 a - - roll moment coefficient for maximum aileron deflection ACI8 d - - roll moment coefficient for maximum differential stabilator deflection
§variable may refer to either roll or yaw axis depending on application.
9
Symbol Value Unit Description
ACI8 r - - roll moment coefficient for maximum rudder deflection ACn8a - -- yaw moment coefficient for maximum aileron deflection ACn& 1 - - yaw moment coefficient for maximum differential stabilator deflection ACn& - - yaw moment coefficient for maximum rudder deflection ACn,FS - - yaw moment coefficient for maximum actuated forebody strake deflection Av A __1 - aerodynamic vane relief increment §
AVA,filt +1 - filtered aerodynamic vane relief increment § 8 a - degree aileron deflection angle
8am 25.0 degree maximum aileron deflection angle 8a - degree differential tail deflection angle 8dm 17.25* degree maximum differential tail deflection angle 8FS -+90.0 degree maximum differential actuated forebody strake deflection _r - degree rudder deflection angle 8rm 30.0 degree maximum rudder deflection angle grvr - degree rolling thrust-vector angle 8TVrm 15.0 degree maximum rolling thrust-vector angle
_"vy - degree yawing thrust-vector angle _Vym 10.0 degree maximum yawing thrust-vector angle §variable may refer to either roll or yaw axis depending on application. *each horizontal tail surface deflects from -24.0 to +10.5 degrees.
Pseudo Controls Overview
This section presents a brief overview of the integrated lateral/directional controls system designed for the HARV airplane. The system as shown in figure 5 is partitioned into a feedback control portion and a pseudo control portion. The feedback controls, depicted on the left side of the figure, combine signals from the pilot controls and the airplane sensors to calculate the airplane accelerations required for stability in flight and response to piloting commands. The feedback gains are calculated using the CRAFT methodology reported in reference 14. This process uses Direct Eigenspace Assignment to make the airplane's stability characteristics have level 1 (satisfactory) flying qualities where possible. Lateral control stick gains are scheduled to achieve the roll rates specified by the design guidelines reported in reference 12. Rudder pedal gains are scheduled to achieve 10 degrees of sideslip angle. Lateral control stick and rudder pedal signals are cross-fed to minimize the angle of sideslip during rolling maneuvers.
Axis Transformation
The commands from the feedback controls to pseudo controls are the lateral pseudo control variable,
Vlat, and the directional pseudo control variable, Vdir. The lateral pseudo control variable commands an
instantaneous angular acceleration about the velocity vector that is a combined rolling and yawing
acceleration about the airplane body axes as is shown in figure 6a. The directional pseudo control
variable commands an instantaneous acceleration about an axis that is perpendicular to the velocity vector
as is shown in figure 6b. The lateral and directional pseudo control variables are combined in the
following axis-transformation formulas (1) to produce the body-axis acceleration commands.
0emil =[COS( )-s,r,(,,lrv,°,]
i'cmd ] Lsin(o0 cos(ct)JLVdirJ
(1)
r md
rs = Vdir
a) Lateral Command, Via t. b) Directional Command, Vdir. Figure 6. Stability-Axis Commands.
Moment Commands
The moments required to produce the desired roll and yaw accelerations are functions of the inertial
characteristics of the airplane and the desired accelerations. Gyroscopic coupling also causes
accelerations during airplane rotational motions. Additional moments required to cancel this inertial
coupling are calculated as functions of the inertial characteristics and the angular body-axis rates of the
airplane.
FL m'l:[-LNcmd.j IXZ - I×zq[Pcm'l+[Izzjkrcmd 3 Iyy-IXZ-Ixx Izz-IYYl[(Pq)l+Ixz J[(rq)j (2)
The first term on the right-hand side of equation (2) translates the desired angular accelerations into the
required body-axis moments and the second term compensates for inertial coupling.
Pseudo Control Variables
The above development yields the roll and yaw moments required for the airplane to respond to the
stability-axis acceleration commands and to offset the effects of inertial coupling. The required moments
are divided by the available moments to yield pseudo control variables that indicate the fraction of the available moments needed. The roll pseudo control variable, Vroll, is the fraction of the available body-
axis roll moment and the yaw pseudo control variable, Vyaw, is the fraction of the available body-axis yaw moment.
Roll control moments are generated by coordinated deflections of the conventional aerodynamic controls (ailerons, rudders, and differential motions of the horizontal stabilators) and may be supplemented with roll control moments generated by the thrust-vectoring system. Similarly, yaw control moments are generated by coordinated deflections of the conventional aerodynamic controls and may be supplemented with yaw control moments generated by the thrust-vectoring system and by differential deflections of the ANSER (actuated forebody strakes) controls.
Generation of yaw control moments by the thrust-vectoring system also causes rolling moments because the center of gravity of the airplane is displaced vertically from the line of thrust of the engines. This displacement is a vertical moment-arm on which the yaw-vectoring forces act, resulting in rolling moments. The ratio of the rolling moments to the yawing moments caused by yawing-moment commands equals the ratio of the vertical moment arm, lz, to the distance that the thrust-vectoring apparatus is aft of the center of gravity, 1TV. The rolling moments are compensated by cross-feeding a portion of the yawing moment command into the rolling moment command.
Vyaw = Ncm d/Navail (3)
Lcm d - l z
Roll Acceleration
The roll acceleration capability of the airplane about its stability axis is calculated. This value is provided for use in scheduling lateral (roll) commands derived from lateral motions of the control stick (see reference 11). Equations (5)-(7) are used to calculate this value. Figure 7 depicts the geometry upon which the equations are based.
Ps,max = lgmax cosot + rmax sina (5)
where
l_max ----- Lavai_l (6) Ixx
- Navail rmax = --- IZZ (7)
The calculated stability-axis roll acceleration capability is the sum of the contributions of the body- axis roll and yaw acceleration capabilities. The body-axis accelerations are calculated from the available roll and yaw moments and the body-axis moments of inertia. The effects of the cross product of inertia, Ixz, are ignored. The calculations do not account for the balance between the roll and yaw axis controls required for coordination.
The roll and yaw control coefficients are primarily functions of angle of attack and examples are given in figures 8 and 9. These figures depict the rolling and yawing moments produced by each of the conventional controls when deflected to its limit. These data were derived from a HARV simulation model (references 15 and 16) having the leading- and trailing-edge flaps in the clean configuration.
AC l
0.07 -_ I I t t t
o.o5f- i...... i i.....i .....i L! i \i i i i I _ AClo o.o4-: _ _ _ i .......i...........i _ or
0.03 ,. _ _ i " E_
0.01 "
-0.Ol --- t t [ t t J -10 0 10 20 30 40 50 60 70 80 90 AOA, degrees
Figure 8. Example Roll Control Moment Coefficients of Conventional Controls, Mach 0.2, altitude 30 000 ft, stabilator --6.75 deg.
AC (^) n
0.02_ _. I t t -I t I _
i i i : "! -0.
-0.
-0.
-0.
-O.lO
-0. -10 0 10 20 30 40 50 60 70 80 90 AOA, degrees
Figure 9. Example Yaw Control Moment Coefficients of Conventional Controls, Mach 0.2, altitude 30 000 ft, stabilator -6.75 deg.
Distribution Schedule Calculations
Let u be a vector containing the deflections of each of the conventional controls normalized by its
maximum value. Let Croll be a vector containing the roll moment coefficients that result from maximum
--
deflection of each conventional control. Let Cyaw be a vector containing the yaw moment coefficients
resulting from maximum deflection of each conventional control.
__, V_Sa/_am 1 u =|_r/_rm[
L_Sd/SdmJ
VACI_I
Croll = |ACl_r[ (11)
LaCl_j
--4 rAcnS_] C,aw 1 LACn_J
The roll and yaw control coefficients for deflections of the conventional controls are calculated as the
scalar products of equations (10) and (11), and of equations (10) and (12), respectively.
T Croll = Croll u (13)
T Cyaw = Cyaw u (14)
Let the normalized control deflections be specified by linear combinations of two control distribution
vectors as follows.
U = droll Vroll + dyaw Vyaw (15)
where Vroll and Vyaw are pseudo control variables for roll and yaw control moments, respectively,
and where droll and dyaw are the corresponding distribution vectors. Distribution vectors are desired
such that the distribution vector for roll control, droll, causes maximum rolling moment with a minimum
yawing moment while the distribution vector for yaw control, dyaw, causes a maximum yawing moment
with a minimum rolling moment. The roll distribution vector is the solution of the following optimization
problem: