



Computer Graphics
3D Affine transforms
Docsity.com
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The concept of 3d affine transformations in computer graphics, which includes position (translation), size (scaling), orientation (rotation), and shapes (shear). It also discusses the representation of points in 3d and the use of homogeneous coordinates for matrix multiplication. Examples and code snippets for translations, scalings, and rotations in 3d.
Typology: Slides
1 / 26

This page cannot be seen from the preview
Don't miss anything!
Computer Graphics3D Affine transforms
Introduction to Transformations n Introduce 3D affine transformation: n Position (translation) n n Size (scaling)Orientation (rotation) n Previously developed 2D (x,y)^ n^ Shapes (shear) n n Now, extend to 3DExtend transform matrices to 3D or (x,y,z) case n Enable transformation of points by multiplication
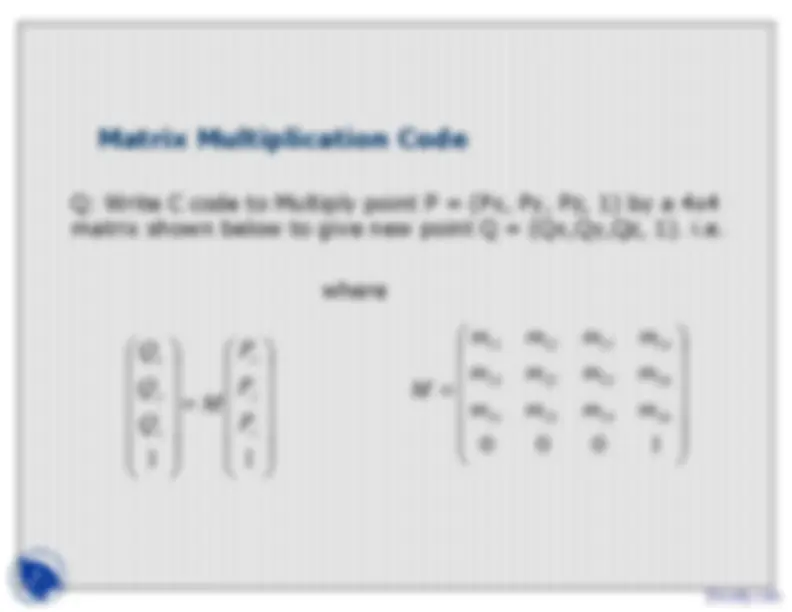
Transforms in 3D n n 2D:3D: 3x3 matrix multiplication4x4 matrix multiplication: homogenous coordinates n n Recall: transform object = transform each verticeGeneral form:
031 032 033 134
21 22 23 24
11 12 13 14 m m m m
m m m m
m m m m M
1 1^ z
y
x z
y
x P
P
P QQ M Xform of P Q
Recall: 3x3 2D Translation Matrix
x y^ ' ' ^ =^ x y + tt yx
y
x
= (^) *
ßPreviously, 2D :
2D Scaling ßScale: Alter object size by scaling factor (sx, sy). i.e
x’ = x. Sxy’ = y. Sy
(1,1)
(2,2) Sx = 2, Sy = 2 (2,2)
(4,4)
yx '' = Sx 0 Sy^0 yx
Recall: 3x3 2D Scaling Matrix
xy '' = Sx 0 Sy^0 yx
y
x Sy
Sx y
x
Example: OpenGL Table Leg // define table leg//-------------------------------------------------------------------------- void tableLeg(double thick, double len){------ glPushMatrix();glTranslated(0, len/2, 0); glScaled(thick, len, thick);glutSolidCube(1.0); } glPopMatrix();
Recall: 3x3 2D Rotation Matrix
(x,y)
(x’,y’) θ r φ
yx '' = ^ cos(sin( θθ )) −cos(sin( θθ )) yx
sin( ) cos( ) 0
cos( ) sin( ) 0 1
y
x y
x θ θ
θ θ
Rotating in 3D n New terminology n X-roll: rotation about x-axis n n Y-roll: rotation about y-axisZ-roll: rotation about z-axis n Which way is +ve rotation n Look in –ve direction (into +ve arrow) n CCW is +ve rotation
x
y z+
Rotating in 3D
Rotating in 3D
= − 0 0 0 1
0 0
0 1 0 0
0 0 s c
c s Ry β
A y-roll:
0 0 0 1
0 0 1 0
0 0
0 0 s c
c s Rz β
A z-roll:
Rules:•Rotate row, column int. is 1•Rest of row/col is 0 •c,s in rect pattern
OpenGL: glrotated( θ, 0,1,0 )
OpenGL: glrotated( θ, 0,0,1 )
Example: Rotating in 3D
= − 1
1
1
4
1
3
0 0 0 1
0 0
0 1 0 0
0 0 s c
c s Q
Q: Using y-roll equation, rotate P = (3,1,4) by 30 degrees: A: c = cos(30) = 0.866, s = sin(30) = 0.5, and
E.g. first line: 3.c + 1.0 + 4.s + 1.0 = 4.
Matrix Multiplication Code n Outline of solution: n Declare P,Q as array: n Declare transform matrix as 2-dimensional array^ • Double P[4], Q[4]; n Remember: C indexes from 0, not 1^ • Double M[4][4]; n Long way: • Write out equations line by line expression for Q[i]
Matrix Multiplication Code n Using loops looks like: n for(i=0;i<4;i++) {temp = 0; for(j=0;j<4;j++){ } temp += P[j]*M[i][j]; }Q[i] = temp; n n Test matrice code rigorouslyUse known results (or by hand) and plug into your code