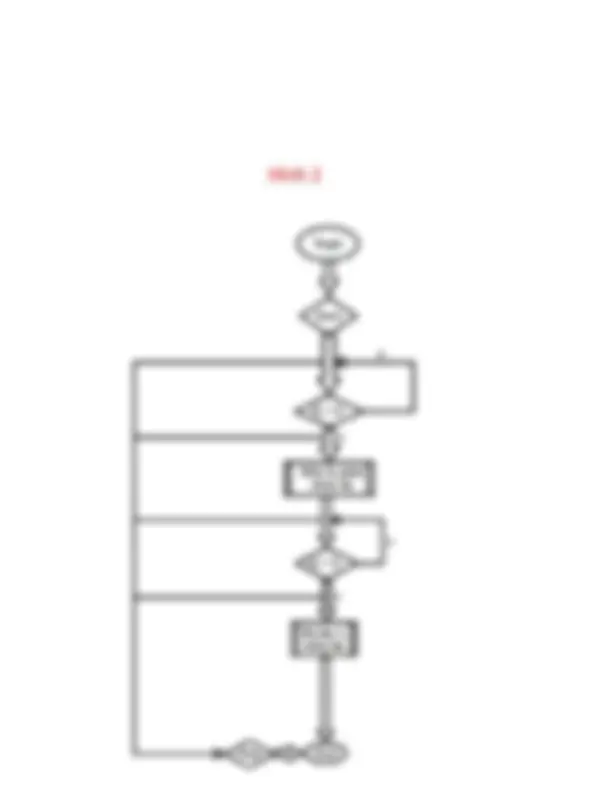
Cho một hệ thống sấy hoạt động theo quy trình sau:
1> Khi mới hoạt động thì hệ thống sấy duy trì nhiệt độ buồng sấy với nhiệt độ là
T1 và duy trì chế độ này trong khoảng thời gian X1 phút.
2> Sau đó, hệ thống sấy duy trì nhiệt độ ở mức T2 và cho tới khi độ ẩm trong buồn
sấy đạt tới mức A (RH) thì tắt hệ thống.
Có 2 nút start để bắt đầu quy trình sấy, và stop để cưỡng bức tắt
quy trình sấy
Các giá trị T1, X1, T2, A< được chỉnh bằng các sử dụng các biến trở.
Khi hệ thống đã chạy thì việc chỉnh T1, X1, T2, A< sẽ không tác động tới quá trình
chaỵ. Nếu muốn tác động thì phải nhấn stop để ngưng chạy và chỉnh sau.
Các giá trị T1, X1, T2, A' được hiển thị trên 4 góc của'LCD.' ' ''
Hãy thưc hiện các yêu cầu sau:
a> Thiết kế phần cứng phù hợp
b> Vẽ lưu đồ
c> Viết chương trình điều khiển và mô phỏng<