



Modern Control Systems
Dr. Mohammad Al Janaideh








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Automatic Control Automatic Control
Typology: Slides
1 / 16

This page cannot be seen from the preview
Don't miss anything!
Properties of State Transition Matrix
Φ ( 0 ) e A^^0 I
1 2 1 2 1 2 Φ ( t t ) e A ( t^ t^ ) e A t e A^ t
Φ ^1 ( t ) Φ ( t )
[ Φ ( t )] n^ Φ ( nt )
Φ ( t (^) 2 t 1 ) Φ ( t 1 t 0 ) Φ ( t 2 t 0 )
s
s s s
sI A 2
3 1 1 2
1 1 ( )( )
( )
( )( ) ( )( )
( ) ( )( ) ( )( )
1 2 1 2
2
1 2
1 1 2
3 1
s s
s s s
s s s s
s
sI A
t t t t
t t t t t e e e e
e e e e t e 2 2
2 2
2 2 2
A^2 ( )
x ( t ) ax ( t ) bu ( t ) x ( t ) x ( t ) bu ( t )
[ ( ) ( )] [ e x ( t )] e bu ( t ) dt
d e at^^ x t ax t at at
We shall begin by considering the scalar case:
By multiplying the both side e at
Integrating this equation between 0 and t gives:
(^)
t e at^ x t x e a bu d 0
( ) ( 0 ) ^ ()
(^00) 0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
4 x(0)= x(0)= x(0)= -
t=0:0.01:4; for x0=-1:1:1; n=size(t); y=x0*exp(-t)+exp(-t)+ plot(t,y) hold on end
x ( t ) Ax ( t ) B u ( t ) x ( t ) x ( t ) B u ( t )
[ ( ) ( )] [ e ( t )] e ( t ) dt
d e ^ A t^^ x t Ax t A t x A t Bu
Considering the vector case:
Integrating this equation between 0 and t gives:
(^)
t e t^ t e u d 0
A x ( ) x ( 0 ) A (^) B ()
x u
x x
x
1
0 2 3
0 1 2
1 2
1
u ( t ) 1
t t t t
t t t t t e e e e
e e e e t e 2 2
2 2
2 2 2
A^2 ( )
d e e e e
e e e e x t e t t t t
t t t t ( ) t^ ( ) [ ] ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) 1 1
0 2 2 2
2 (^0 )
2 2
A x
x ( t ) ?
(^)
t t
t t
e e
e e x t
x t t (^) 2
2
2
(^1 )
1 2
1
( )
( ) x ( 0 ) 0 x ( )
(^00 1 2 3 4 5 6 )
x 1 (t) x 2 (t)
t=0:0.01:7; x1=0.5-exp(-t)+0.5exp(-2t); x2=exp(-t)-exp(-2*t); plot(t,x1) hold on plot(t,x2,'red')
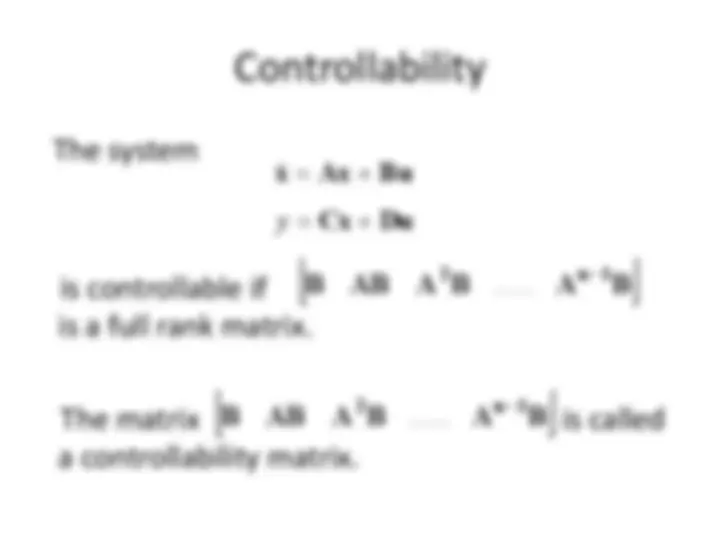
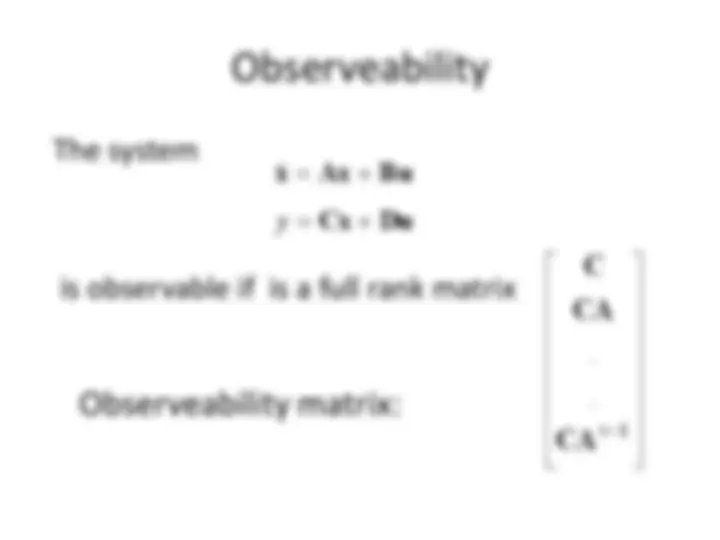
Cx Du
x Ax Bu
y
Cx Du
x Ax Bu
y
CA n^ ^1
CA
C
.
.
Observeability matrix:
(^0) 1
1 1 A
(^0)
1 B
(^) 0
1 0
1 0 1
1 1 AB
(^00)
1 1 B AB
Not controllable
(^) 2 1
1 1 A
(^1)
0 B
C 1 0
CA 1 1
0 1
1 1 CA
C
(^1) 1
0 1 B AB Controllable
Observable