



EE3813 Control System
Dr. Aamer Iqbal Bhatti
h
b()
T
A: Zees
h
an Ba
b
ar
(
S1
)
Abdul Raheem (S2)
Docsity.com
























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture was delivered by Ali Zaffar Khan for Introductory Control Systems course at Amity Business School. It includes: Control, Systems, Nasty, Stabilized, Platform, Inverted, Pendulum, Electromagnetic, Levitation, Actuate, Sense
Typology: Slides
1 / 43

This page cannot be seen from the preview
Don't miss anything!
h^ b
(^ ) TA : Zeeshan Babar (S1)Abdul Raheem
(S2)
Course
Book
Controls
?
Systems^ ^ Definition
d ^ Air‐conditioners ^ Bracket
fans ^ Amplifiers^ Amplifiers ^ Humans
(Combination
of^ sub
‐systems)
^ Power
Supply
of^ a^ PC
Some
Nasty
Systems
Systems
can
be^
Nasty
too…
Stabilized Platform
NXT
Ballbota bot
NXT
Chimney
Climbery
Robotic
Arm
Electromagnetic Levitation SystemElectromagnetic
Levitation
System
Where
Controls
fit^
in
C^
t^
f M d
C^
t^ l
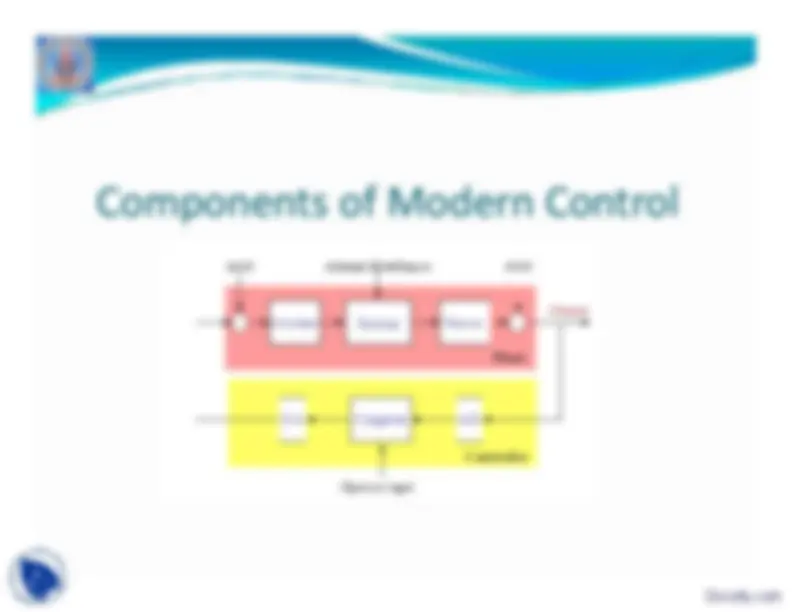
Components
of^ M
odern
Control
Implementation^ ^ Modern
^ Piece
of^ Software ^ Housed
in^ a^ PC H^ t d
i^ E
b dd d
^ Hosted
in^ an^ Embedded
Processor
^ Real Time^
(Fast^ Processing)
is^ the^
key