


Lecture 15: Basic Multi-View Geometry












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Material Type: Notes; Professor: Tappen; Class: COMPUTER VISION; Subject: Computer Applications; University: University of Central Florida; Term: Unknown 1995;
Typology: Study notes
1 / 28

This page cannot be seen from the preview
Don't miss anything!
Lecture 15: Basic Multi-View Geometry
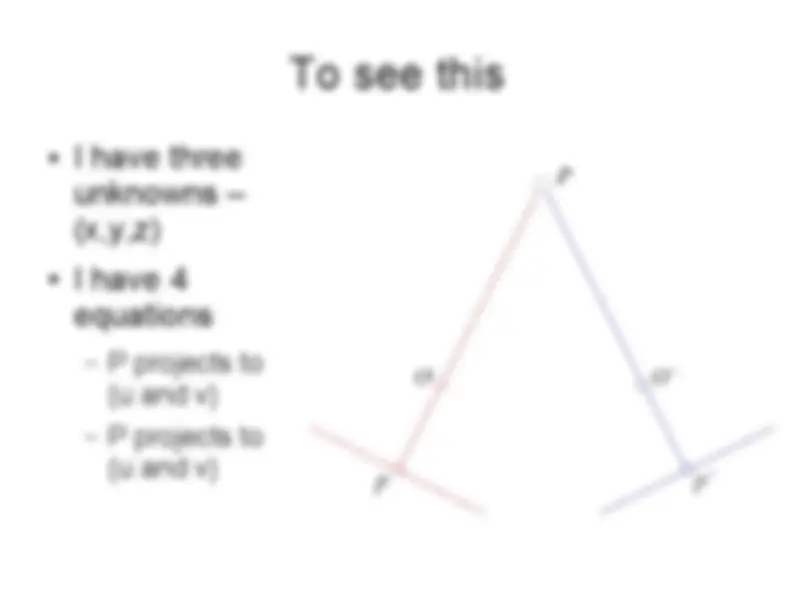
● If I needed to find out how far point is away from me, I could use triangulation and two views scene pointscene point optical centeroptical center image plane image plane (Graphic from Khurram Shaffique)
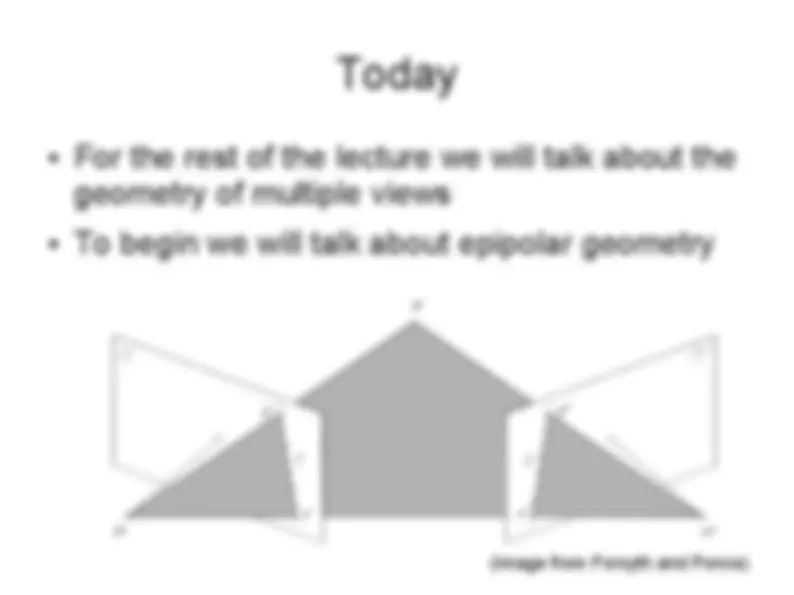
● For the rest of the lecture we will talk about the geometry of multiple views ● To begin we will talk about epipolar geometry (Image from Forsyth and Ponce)
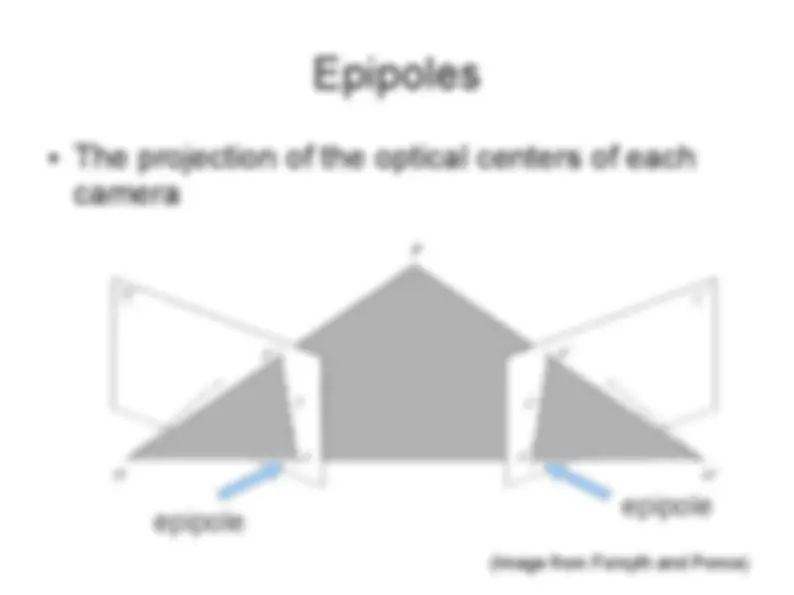
● The projection of the optical centers of each camera (Image from Forsyth and Ponce) epipole epipole
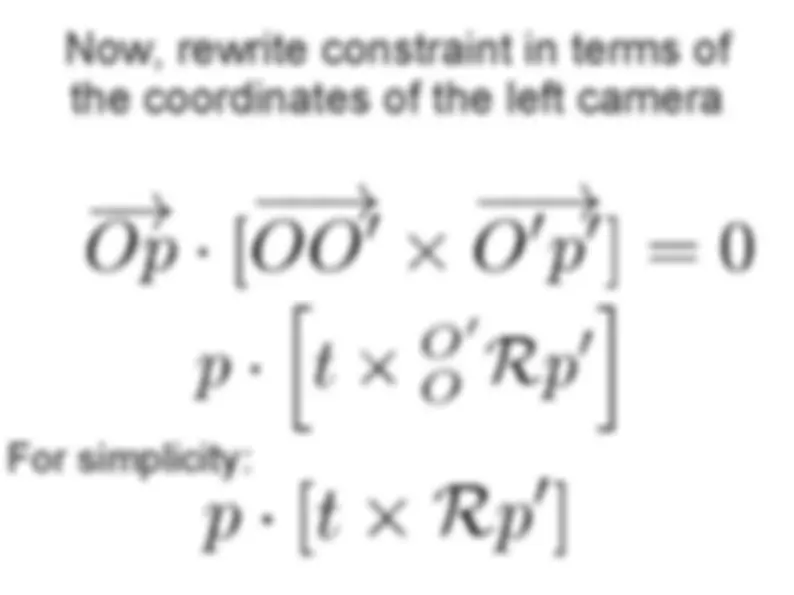
● The vectors , , and are coplanar ● Can be expressed as (Image from Forsyth and Ponce)
● The vector returned by the cross product is perpendicular to the two vectors ● Can be thought of as a normal to a plane ● If the lines in the plane, it should also be perpendicular to that normal (Image from Forsyth and Ponce)
● Starting with: ● A cross product can be rewritten as a matrix multiplication, leading to the constraint is called the essential matrix
● The relationship still holds, but we have to calibrate the cameras first. ● Those calibration matrices, combined with the essential matrix are known as the fundamental matrix ● Encodes information from the intrinsic and extrinsic parameters ● Also Rank 2
● Basic algorithm: 8-point algorithm ● Find 8 corresponding points in the images ● Once you have the corresponding p and p' points, ● Is linear in F c
● Text also describes the geometry of 3 or more views (From Forsyth and Ponce)
● It can tell us where to look for points in the other image ● The quantity is a vector ● So, defines a line ● This tells us where to look for the point that corresponds to p ● (Demo) c
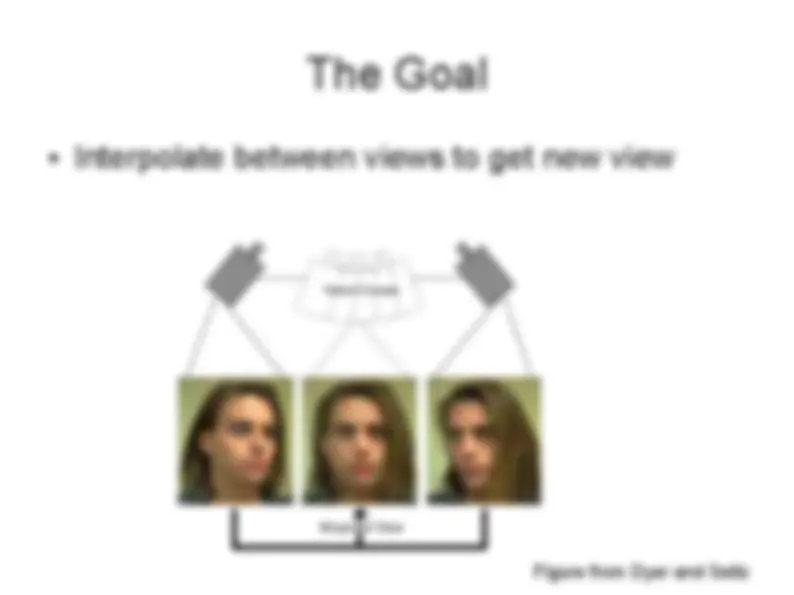
● Interpolate between views to get new view Figure from Dyer and Seitz
Figure from Dyer and Seitz