Download Bode Diagrams-Control System-Paper Solution and more Exams Control Systems Analysis in PDF only on Docsity!
Solution to the first sessional
examination
Chapter 1. Problem Statement
The Avemar ferry, shown in Figure 1(a), is a large 670-ton ferry hydrofoil built for Mediterranean ferry
service. It is capable of 45 knots (52 mph). The boat's appearance, like its performance, derives from the
innovative design of the narrow "wavepiercing" hulls which move through the water like racing shells.
Between the hulls is a third quasihull which gives additional buoyancy in rough seas. Loaded with 900
passengers and crew, and a mix of cars, buses, and freight cars trucks, one of the boats can carry almost
its own weight. The Avemar is capable of operating in seas with waves up to 8 ft in amplitude at a speed
of 40 knots as a result of an automatic stabilization control system. Stabilization is achieved by means of
flaps on the main foils and the adjustment of the aft foil. The stabilization control system maintains a
level flight through rough seas. Thus, a system that minimizes deviations from a constant lift force or,
equivalently, that minimizes the pitch angle? has been designed. A block diagram of the lift control
system is shown in Figure 1(b).The desired response of the system to wave disturbance is a constant-
level travel of the craft. Establish a set of reasonable specifications and design a compensator G_c (s) so
that the performance of the system is suitable. Assume that the disturbance is due to waves with a
frequency ?=6 rad/s (Dorf, 2005). Use Loopshaping technique for the design. Provide necessary plots to
show the performance of the designed compensator.
Figure 1(a)
Figure 1(b)
However, this selection of loop gain will result into an improper compensator. To avoid this, we add two
more poles at higher frequencies so that the magnitude of the loop gain designed in earlier steps is not
disturbed in the operating region. The expression for the compensator will be simplified if we take the
same quadratic factor which appears in the transfer function of the plant, i.e.,
Transfer function: s^2 + 4 s + 10
s^5 + 80 s^4 + 2536 s^3 + 2880 s^2 + 90000 s
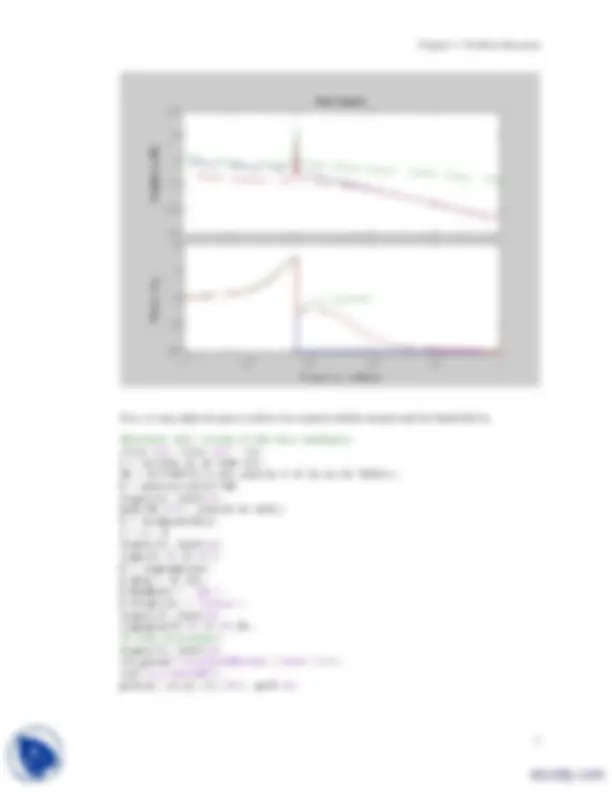
Now, we may adjust the gain to achieve the required stability margins and the bandwidth etc.
%Evaluate this string in the base workspace clear all; close all; clc; G = tf([50],[1 80 2500 0]); GK = tf(2500[1 4 10],conv([1 0 36 0],[1 80 2500])); K = minreal(inv(G)GK) figure(1); hold on; bode(GK,'k'); xlim([0.01 100]); T = feedback(GK,1) S = 1 - T figure(2); hold on; sigma(S,'k',T,'b'); P = sigmaoptions; P.XLim = [0 30]; P.MagUnits = 'abs'; P.FreqScale = 'linear'; figure(3); hold on sigmaplot(T,'k',S,'b',P); %% with disturbance figure(6); hold on; set_param('sessional1M/Gain','Gain','1'); sim('sessional1M'); plot(y(:,1),y(:,2),'k'); grid on;