



Brightness Constancy
16-385 Computer Vision (Kris Kitani)
Carnegie Mellon University






















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
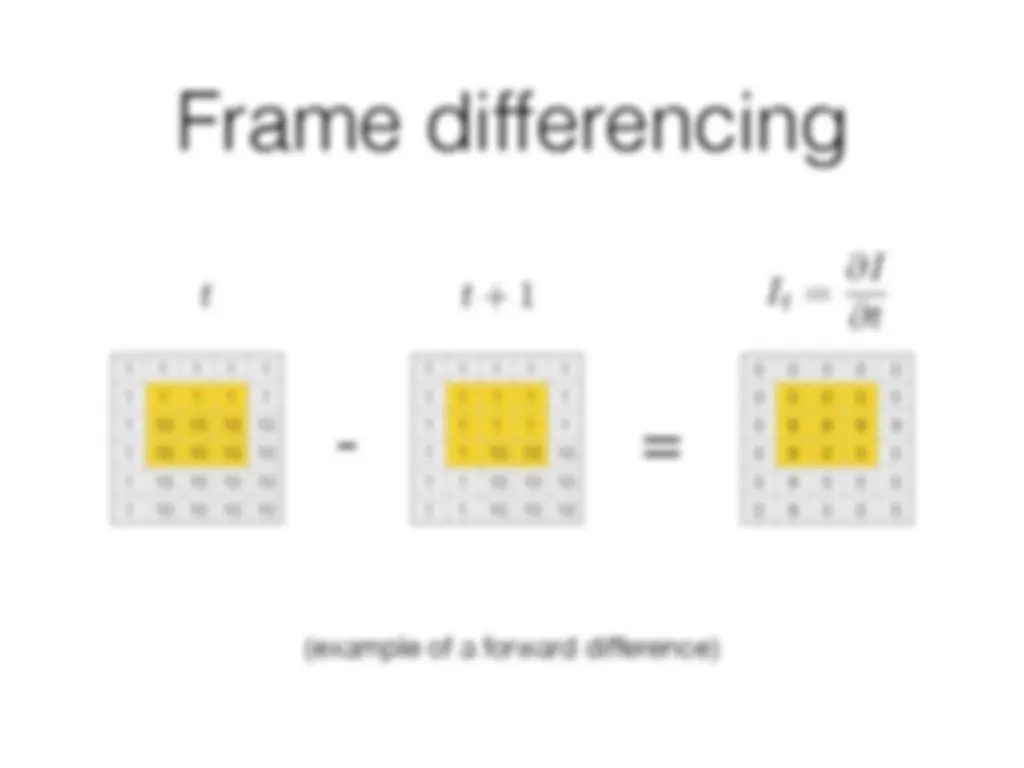
The problem of estimating the motion of each pixel in consecutive image frames using brightness constancy and small motion assumptions. It presents the brightness constancy equation and its derivation through multivariable Taylor series expansion. The document also explains how to compute the flow velocities and image gradients using spatial and temporal derivatives, forward difference, frame differencing, Sobel filter, and Scharr filter. related to computer vision and could be useful for study notes, lecture notes, summaries, and assignments.
Typology: Study notes
1 / 39

This page cannot be seen from the preview
Don't miss anything!
16-385 Computer Vision (Kris Kitani) Carnegie Mellon University
Problem Definition Assumptions Brightness constancy Small motion Given two consecutive image frames, estimate the motion of each pixel
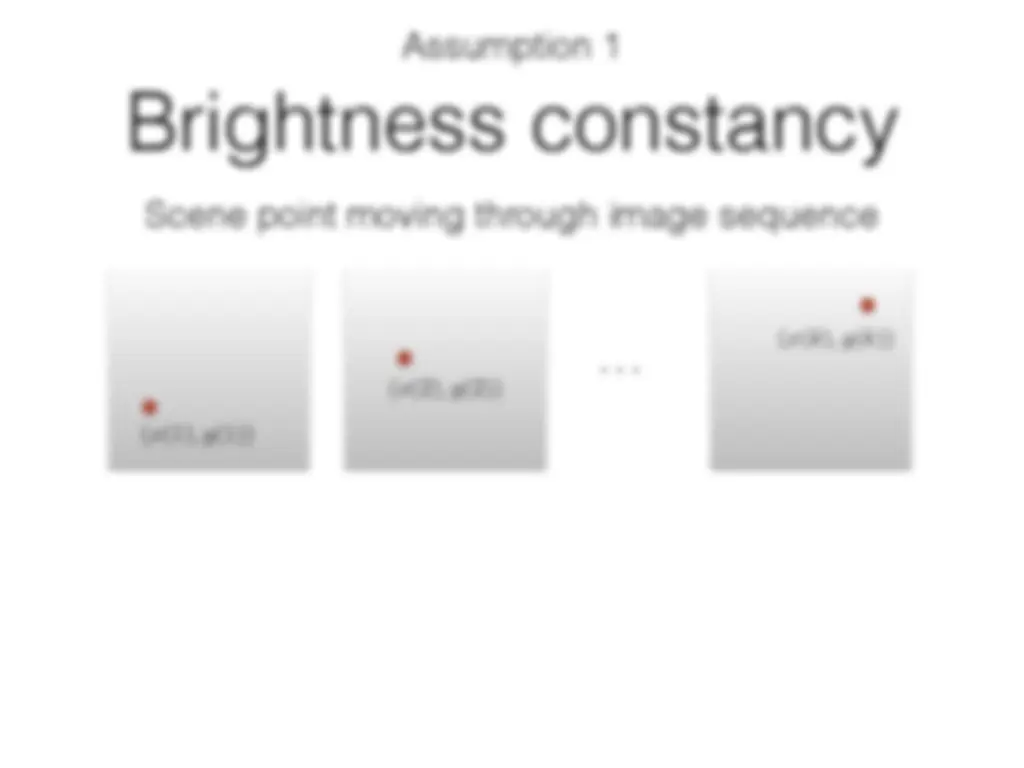
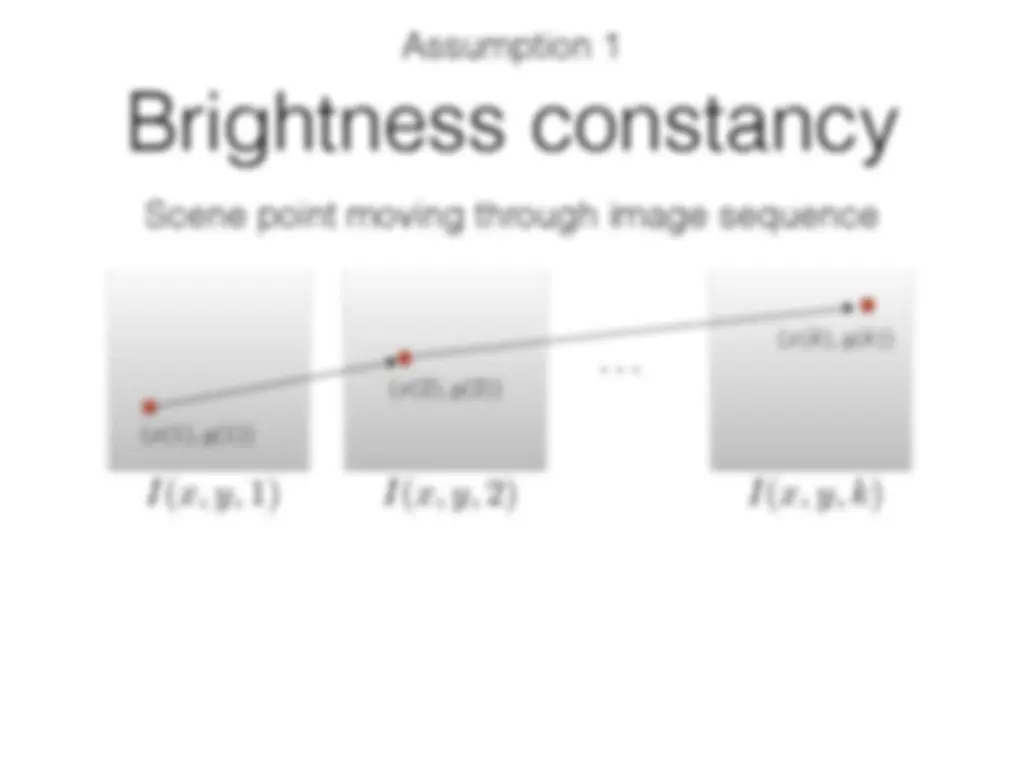
I(x, y, 1) I(x, y, 2)
I(x, y, k) (x(1), y(1)) (x(2), y(2)) (x(k), y(k)) Scene point moving through image sequence Assumption 1
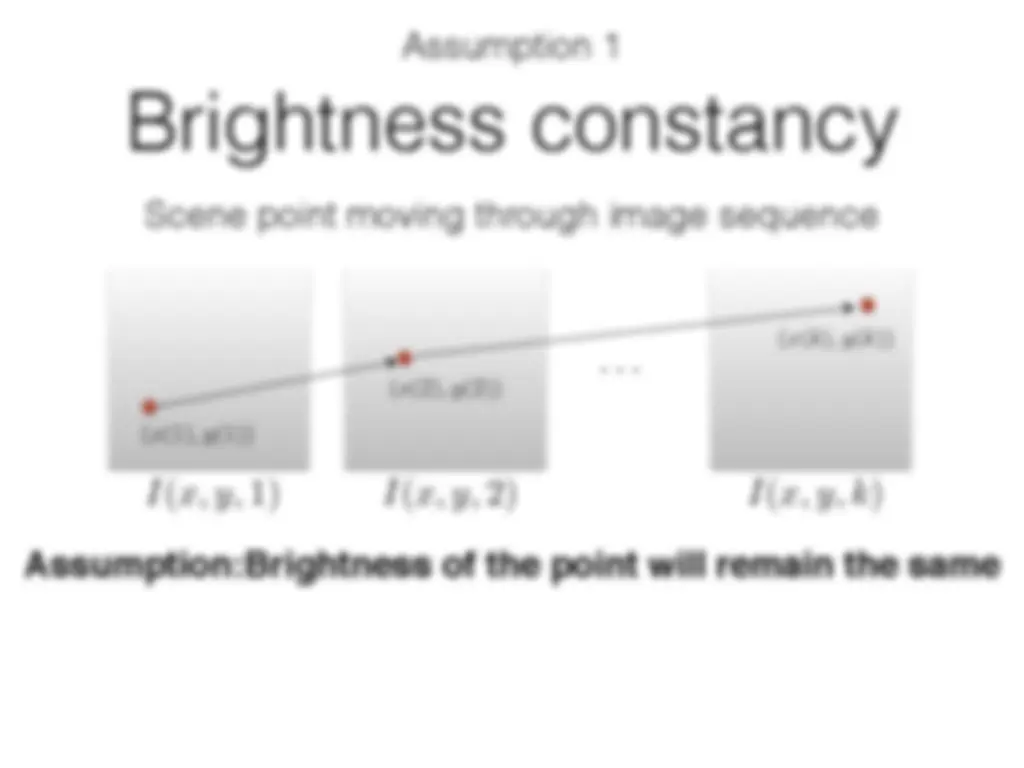
I(x, y, 1) I(x, y, 2)
I(x, y, k) (x(1), y(1)) (x(2), y(2)) Assumption:Brightness of the point will remain the same (x(k), y(k)) Scene point moving through image sequence Assumption 1
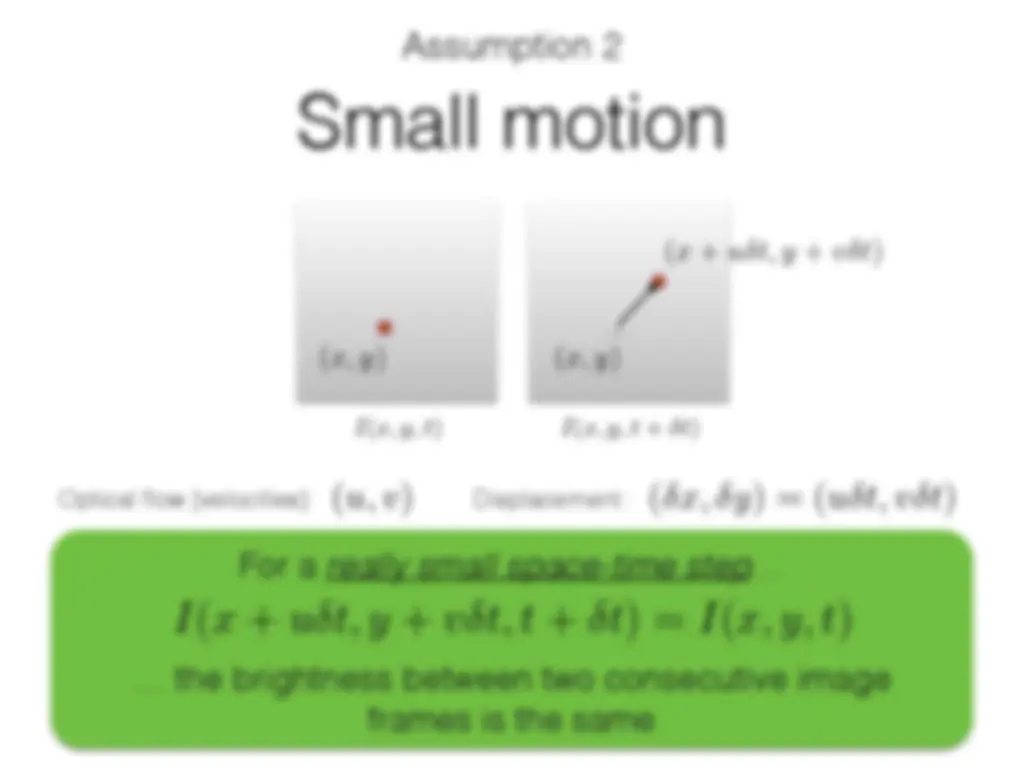
I(x, y, t) I(x, y, t + �t) Assumption 2
I(x, y, t) (x, y) (x + u�t, y + v�t) (x, y) I(x, y, t + �t) Assumption 2
I(x, y, t) (x, y) (x + u�t, y + v�t) (x, y) Optical flow (velocities): (^) (u, v) Displacement: (�x, �y) = (u�t, v�t)
… the brightness between two consecutive image frames is the same I(x, y, t + �t) For a really small space-time step … Assumption 2
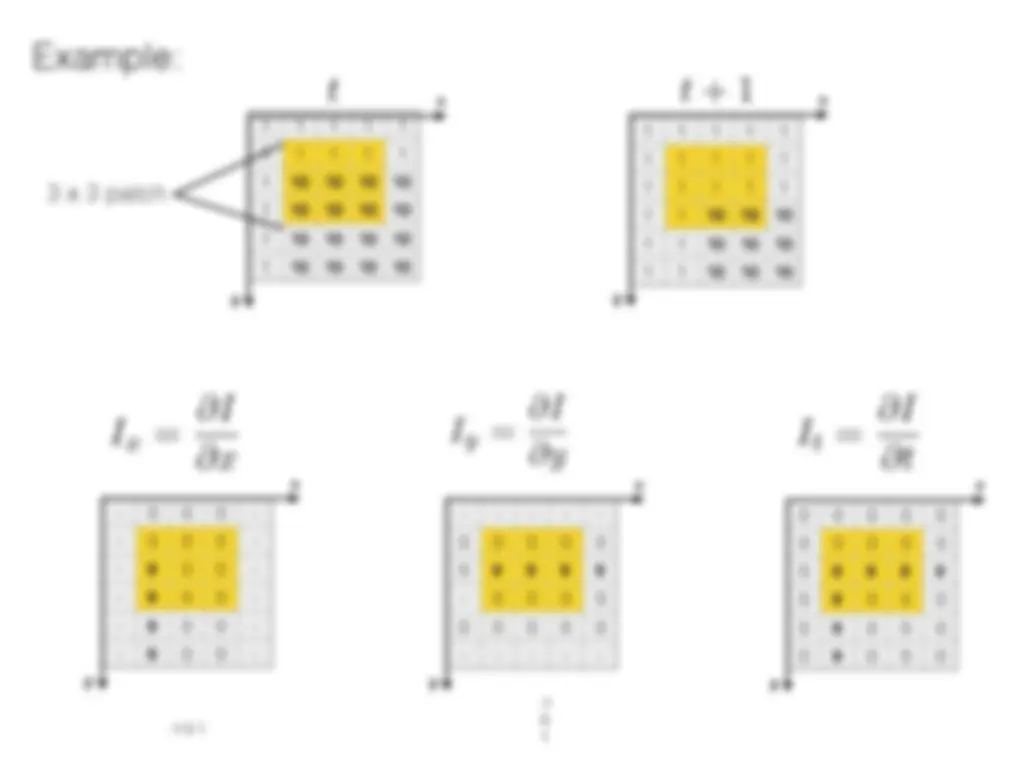
dI dt = @I @x dx dt
@I @y dy dt
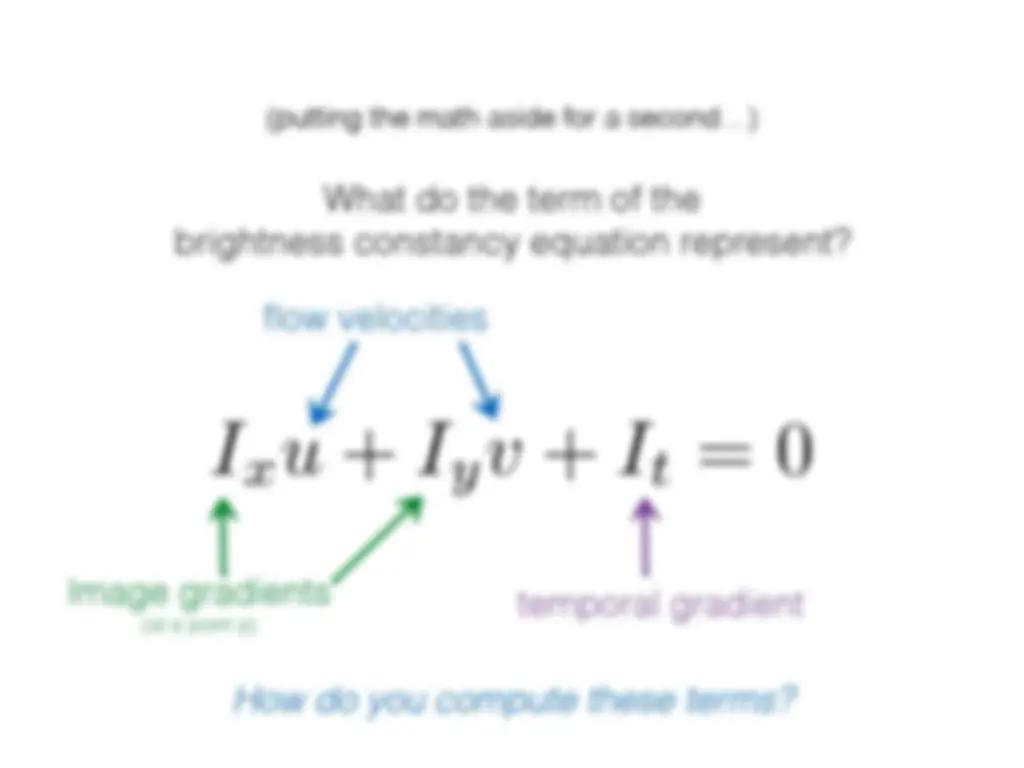
@I @t = 0 total derivative partial derivative Equality is not obvious. Where does this come from? These assumptions yield the …
I(x + u�t, y + v�t, t + �t) = I(x, y, t) For small space-time step, brightness of a point is the same
I(x + u�t, y + v�t, t + �t) = I(x, y, t) For small space-time step, brightness of a point is the same Insight: If the time step is really small, we can linearize the intensity function
I(x + u�t, y + v�t, t + �t) = I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f (x, y) ⇡ f (a, b) + f x (a, b)(x � a) � f y (a, b)(y � b) assuming small motion I(x, y, t) + @I @x �x + @I @y �y + @I @t �t = I(x, y, t)
I(x + u�t, y + v�t, t + �t) = I(x, y, t) assuming small motion I(x, y, t) + @I @x �x + @I @y �y + @I @t �t = I(x, y, t) cancel terms Multivariable Taylor Series Expansion (First order approximation, two variables) f (x, y) ⇡ f (a, b) + f x (a, b)(x � a) � f y (a, b)(y � b) fixed point partial derivative
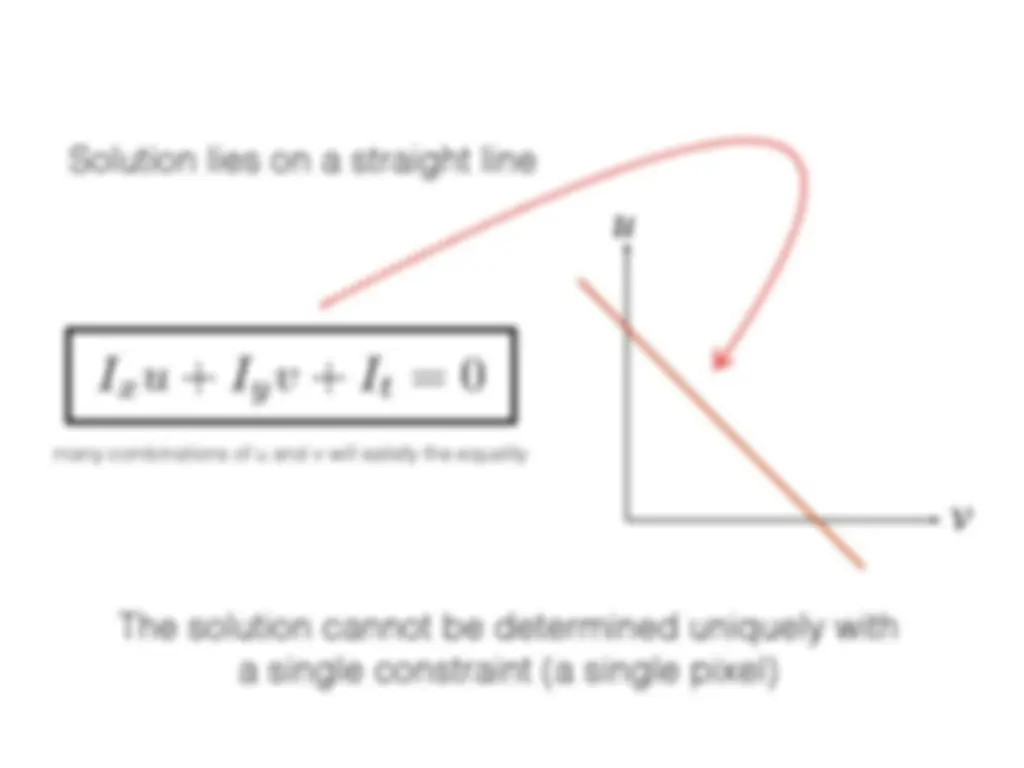
I(x + u�t, y + v�t, t + �t) = I(x, y, t) assuming small motion divide by take limit �t �t! 0 I(x, y, t) + @I @x �x + @I @y �y + @I @t �t = I(x, y, t) @I @x �x + @I @y �y + @I @t �t = 0 Multivariable Taylor Series Expansion (First order approximation, two variables) f (x, y) ⇡ f (a, b) + f x (a, b)(x � a) � f y (a, b)(y � b)
I(x + u�t, y + v�t, t + �t) = I(x, y, t) assuming small motion @I @x dx dt
@I @y dy dt
@I @t = 0 divide by take limit �t �t! 0 I(x, y, t) + @I @x �x + @I @y �y + @I @t �t = I(x, y, t) @I @x �x + @I @y �y + @I @t �t = 0 Multivariable Taylor Series Expansion (First order approximation, two variables) f (x, y) ⇡ f (a, b) + f x (a, b)(x � a) � f y (a, b)(y � b)