Download Building a Problem Statement for Review Theories of ... and more Summaries Literature in PDF only on Docsity!
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
Chapter 8 Steady-State Response Analyses
After completing this chapter, the students will be able to:
- Find the steady-state error for unity feedback systems (type 0, 1 and 2),
- Find the steady-state error for non-unity feedback systems,
- Design the gain of a closed-loop system to meet a steady-state error specification,
- Find the steady-state error for disturbance inputs. 1. Introduction
The steady state error is a measure of system accuracy. These errors arise from the
nature of the inputs, system type and from nonlinearities of system components such
as static friction, backlash, etc. These are generally aggravated by amplifiers drifts,
aging or deterioration. The steady state performance of a stable control system is
generally judged by its steady state error to step, ramp and parabolic inputs.
Consider a unity feedback system as shown in the Fig. 1. The difference between input
and output is the error signal E(s).
Fig.1 Closed-loop unity feedback control system
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
The closed loop transfer function (CLTF) is:
As we know 𝐶
= 𝐸(𝑠) × 𝐺(𝑠)
Therefore,
× 𝑅(𝑠)
Steady-state error e ss
may be found using the Final Value Theorem (FVT) as follows:
𝑠𝑠
= lim
S→
The above equation shows that the steady state error depends upon the input R(s) and
the forward transfer function G(s). The expression for steady-state errors for various
types of standard test signals shown below:
2. Steady state error and standard test input
2.1 Step input
Input is independent on time; r (t) = 1 OR R(s)=1/S
𝑠𝑠
= lim
S→
= lim
S→
𝑆 × 1 /𝑆
= lim
S→
𝑠𝑠
1 + lim
S→
𝑝
Where K p
is the position error coefficient and equals G(0) or 𝐾
𝑝
= lim
S→
G
s
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
𝑣
= lim
S→
SG
s
0 × 𝐾
1
2
𝑗
0
1
2
𝑘
𝑎
= lim
S→
2
G
s
0 × 0 × 𝐾
1
2
𝑗
0
1
2
𝑘
The steady-state error corresponds to each coefficient is calculated as follows:
𝑠𝑠
𝑝
𝑠𝑠
𝑣
𝑠𝑠
𝑎
Thus, a system with n = 0, or no integration in G(s) has
- A constant position error,
- Infinite velocity error and
- Infinite acceleration error 3. 2 Type one system (n= 1 )
In that case, the calculation of the three coefficients K p
, K
v
and K a
are
𝑝
= lim
S→
G(s) =
1
2
𝑗
1
1
2
𝑘
𝑣
= lim
S→
SG(s) =
𝑆 × 𝐾(𝑍
1
2
𝑗
1
1
2
𝑘
𝑎
= lim
S→
2
G
s
𝑆 × 0 × 𝐾
1
2
𝑗
1
1
2
𝑘
The steady-state error corresponds to each coefficient is calculated as follows:
𝑠𝑠
𝑝
𝑠𝑠
𝑣
𝑠𝑠
𝑎
Thus, a system with n =1, or with one integration in G(s) has
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
- A zero-position error,
- A constant velocity error and
- Infinite acceleration error 3. 3 Type two system (n= 2 )
In that case, the calculation of the three coefficients K p
, K
v
and K a
are
𝑝
= lim
S→
G(s) =
1
2
𝑗
2
1
2
𝑘
𝑣
= lim
S→
SG(s) =
𝑆 × 𝐾(𝑍
1
2
𝑗
2
1
2
𝑘
𝑎
= lim
S→
2
G
s
2
× 𝐾
1
2
𝑗
2
1
2
𝑘
The steady-state error corresponds to each coefficient is calculated as follows:
𝑠𝑠
𝑝
𝑠𝑠
𝑣
𝑠𝑠
𝑎
Thus, a system with n = 2, or with one integration in G(s) has
- A zero-position error,
- A zero-velocity error and
- A constant acceleration error.
Summary
Step Input Ramp Input Parabolic Input
Type 0 system
𝑝
Type 1 system 0
𝑣
Type 2 system 0 0
𝑎
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
𝑝
= lim
S→
G(S) =
120 × 2
3 × 4
𝑠𝑠
For ramp input 5tu(t), we must calculate the velocity error coefficient (K v
𝑣
= lim
S→
S G(S) =
0 × 120 × 2
3 × 4
𝑠𝑠
For parabolic input 5t
2
u(t), we must calculate the acceleration error coefficient (K a
𝑎
= lim
S→
2
G(S) =
0 × 120 × 2
3 × 4
𝑠𝑠
2 × 5
Example #2:
Find the steady-state errors for inputs of 5u(t), 5tu(t), and 5t
2
u(t) to the system shown
below. The function u(t) is the unit step.
For step input 5u(t), we must calculate the position error coefficient (K p
𝑝
= lim
S→
G(S) =
100 × 2 × 6
0 × 3 × 4
𝑠𝑠
For ramp input 5tu(t), we must calculate the velocity error coefficient (K v
𝑣
= lim
S→
S G(S) =
100 × 2 × 6
3 × 4
𝑠𝑠
For parabolic input 5t
2
u(t), we must calculate the acceleration error coefficient (K a
𝑎
= lim
S→
2
G(S) =
0 × 100 × 2 × 6
3 × 4
𝑠𝑠
2 × 5
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
Example #3:
Find the steady-state errors for inputs of 5u(t), 5t u(t), and 5t
2
u(t) to the system shown
in Fig. below. The function u(t) is the unit step.
G
s
For step input 5u(t), we must calculate the position error coefficient (K p
𝑝
= lim
S→
G(S) =
2 × 1
0 × 17
𝑠𝑠
For ramp input 5tu(t), we must calculate the velocity error coefficient (K v
𝑣
= lim
S→
S G(S) =
2 × 1
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
Fig.
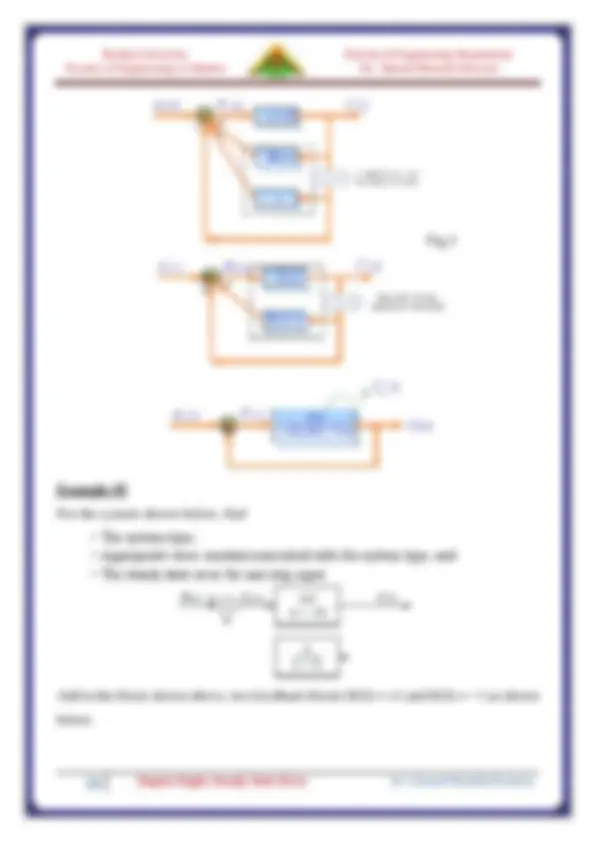
Example # 5
For the system shown below, find
- The system type,
- Appropriate error constant associated with the system type, and
- The steady state error for unit step input
Add to the block shown above, two feedback blocks H(S) = + 1 and H(S) = − 1 as shown
below.
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
The equivalent feed-forward transfer function is
3
2
System Type: 0
Appropriate error constant is K p
𝑝
= lim
S→
G
S
100 × ( 0 + 5 )
3
+ 15 × 0
2
− 50 × 0 − 400
Steady State Error e ss
𝑠𝑠
𝑝
The negative value for E ss
implies that the output is larger than the input step.
Example # 6
An engine speed control system is shown below.
1) Calculate E ss
for step input with magnitude A when K 2
2) Calculate E ss
for step input with magnitude A when K 2
3) Calculate E ss
for ramp input with slope A when K 2
4) Calculate E ss
for ramp input with slope A when K 2
- Given K 1
=1.2, K
2
=8.4, and T=0.5, what value of K gives K v
=6 for unit ramp
input. Find the corresponding steady-state error. Sketch the input and output as
functions of time in that case.
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
5. Steady-state Error for Disturbances:
Using super position to calculate the system T.F.
When D(s)=
1
2
1
2
When R(s)=
2
1
2
1
2
1
2
2
1
2
But the error signal is given by
1
2
1
2
2
1
2
1
2
1
2
2
1
2
𝑠𝑠
= lim
𝑠→ 0
1
2
1
2
− lim
𝑠→ 0
2
1
2
The first term, is the steady-state error due to R(s). The second term, is the steady-state
error due to the disturbance.
Example # 7
Consider the servo system with tachometer feedback shown in Figure.
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
Obtain the error signal E(s) when both the reference input R(s) and disturbance input
D(s) are present. Obtain also the steady-state error when the system is subjected to a
reference input (unit-ramp input) and disturbance input (step input of magnitude d).
Using super position:
(when D(S) = 0)
2
ℎ
(when R(S) = 0)
2
ℎ
The overall output is
2
ℎ
[
𝐾 × 𝑅
]
Since E(s) = R(s) – C(s);
2
ℎ
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
𝜉 𝜔
𝑛
= 1
Also, we have the delay time T d
= 0.
𝑇
𝑑
=
1 + 0. 7 𝜉
𝜔
𝑛
= 0. 5
Multiply both sides by 𝜉, then
𝑇
𝑑
=
𝜉 + 0. 7 𝜉
2
𝜉 𝜔
𝑛
= 0. 5
But we get that, 𝜉 𝜔 𝑛
= 1 , therefore
- 7 𝜉
2
Solving this equation
𝜉 = 0. 392281 (𝑎𝑐𝑐𝑒𝑝𝑡𝑒𝑑)
𝜉 = − 1. 82085 (𝑟𝑒𝑗𝑒𝑐𝑡𝑒𝑑)
𝜔
𝑛
=
1
𝜉
= 2. 5492 𝑟𝑎𝑑/𝑠
From the system block diagram
The system T.F.
𝐶(𝑠)
𝑅(𝑠)
=
𝐾
𝑆
2
The system characteristic equation is
𝑆
2
The standard form of 2
nd
order system characteristic equation is
𝑆
2
𝑛
𝑠 + 𝜔
𝑛
2
= 0
By comparing
2 𝜉𝜔
𝑛
= 3 𝑇
𝑇 =
2
3
Also,
𝜔
𝑛
2
= 𝐾𝑇
𝐾 =
𝜔
𝑛
2
𝑇
= 9. 7476
The % maximum over shoot M p
𝑝
−
𝜋 𝜁
√ 1 − 𝜁
2
× 100 = 26. 19 %
Rise Time:
𝑇
𝑟
=
𝜋 − 𝛽
𝜔
𝑛
√ 1 − 𝜉
2
Β = cos
(𝜉) = 66.90349̊ = 1.167686 rad
𝑇
𝑟
=
𝜋 − 1. 167686
- 5492 √ 1 − 0. 392281
2
= 0. 842 𝑠𝑒𝑐.
Peak Time:
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
𝑇
𝑝
=
𝜋
𝜔
𝑛
√ 1 − 𝜉
2
𝑇
𝑝
=
𝜋
- 5492 √ 1 − 0. 392281
2
= 1. 34 𝑠𝑒𝑐.
To get the steady-state error and position error coefficient, the system must be unity feedback,
so we will add +ve and – ve feedback as shown in fig
Then the unity feedback system will be
𝐾
𝑝
= lim
𝑆→ 0
𝐺
( 𝑠
)
𝐾
𝐾𝑇 − 𝐾
=
1
𝑇 − 1
=
1
- 6667 − 1
= − 3
𝐸
𝑠𝑠
=
1
1 + 𝐾
𝑝
=
1
1 − 3
= − 0. 5
Example #9:
The control system, shown in Fig. below, is subjected to a unit ramp function,
a) Determine the value of K and K h
such that the system has an overshoot of
16.303% and a damped natural frequency of 3.4641 rad/sec.
b) Calculate the rise time, peak time and settling time based on ±2% tolerance
c) Define the system type
d) Calculate the steady-state error of that system
e) If an integrator is added in the forward path after the 1
st
summing point directly,
calculate the new steady-state error.
Maximum overshoot = 0.16303 = 𝑒
−
𝜋𝜁
√ 1 −𝜁
2
taking (ln) for both sides
C ( s )
R ( s )
( s + 2 )
K
K h
s
1
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
The new G(s)H(s) =
𝐾 𝐾 ℎ
𝑆
2
(𝑆+ 2 +𝐾 𝐾
ℎ
)
The new velocity error coefficient K V
= lim
𝑆→ 0
𝑆 𝐺(𝑠)𝐻(𝑠) = lim
𝑆→ 0
𝐾
𝑆
2
(𝑆+ 2 +𝐾 𝐾
ℎ
)
𝐾
0
The new steady-state error (E ss
1
𝐾
𝑉
1
∞
Example #10:
For the system given below, find the steady-state error due to step input for both of
reference input R(s) and the disturbance D(s).
If D(s)=
If R(s)=
Replace the values of R(s) and D(s) by 1/S
𝑠𝑠
= lim
𝑠→ 0
𝐾 𝐾
ℎ
𝑆(𝑆 + 2 + 𝐾 𝐾
ℎ
)
R(S) C(S)
1
𝑠
Integrator
Dr. Ahmed Mustafa Hussein Faculty of Engineering at Shubra
Chapter Eight: Steady-State Error Dr. Ahmed Mustafa Hussein
Sheet 6 (Steady-State Analysis)
- For unity feedback control systems given below, find the position (K p
), velocity (K v
and acceleration (K a
) error coefficients.
- For the system shown in Fig. 1 , design the value of K so that there is 1% error in the
steady state for an input 100tu(t).
- For the system shown in Fig. 2 , find
- The system type
- Appropriate error constant associated with the system type, and find the
corresponding steady-state error.
- Consider the system shown in Fig. 3. Prove that the steady-state error for a unit ramp
input is
2 𝜁
𝜔
𝑛
. Also show that the damping ratio is
𝐵
2
√
𝐾 𝐽
and the undamped natural
frequency is √
𝐾
𝐽
2
Fig. 1
Fig. 2