Download Centralized Model Predictive Control: Principles and Applications and more Slides Process Control in PDF only on Docsity!
CHAPTER 23: Centralized MPC Control
When I complete this chapter, I want to be
able to do the following.
Explain centralized control
Build a discrete process model
Explain the trajectory optimization for MPC
Explain the advantages of MPC
Describe criteria for selecting MPC overmultiloop control
Outline of the lesson.
Review IMC structure and principles
Develop MPC for SISO
Generalize MPC for MIMO
Discuss important enhancements
Explain key insights
Develop application guidelines
CHAPTER 23: Centralized MPC Control
L
F
T
A
CentralizedController
CHAPTER 23: Centralized MPC Control
Centralized Control isapplied to controlsystems with interaction. •^
All process information is used by the controller
-^
Better control performance is possible
-^
Substantial increases in controller complexity and inreal-time computations
L
F
T
A
CentralizedController
CHAPTER 23: Centralized MPC Control
Centralized Controldeveloped in the 1960’swith major enhancementsaround 1980. •^
Original use was limited to few industries and highlyskilled practitioners
-^
Now widely applied in many industries
-^
Good software facilitates applications
-^
We will discuss the Dynamic Matrix Control approach,using the IMC control structure
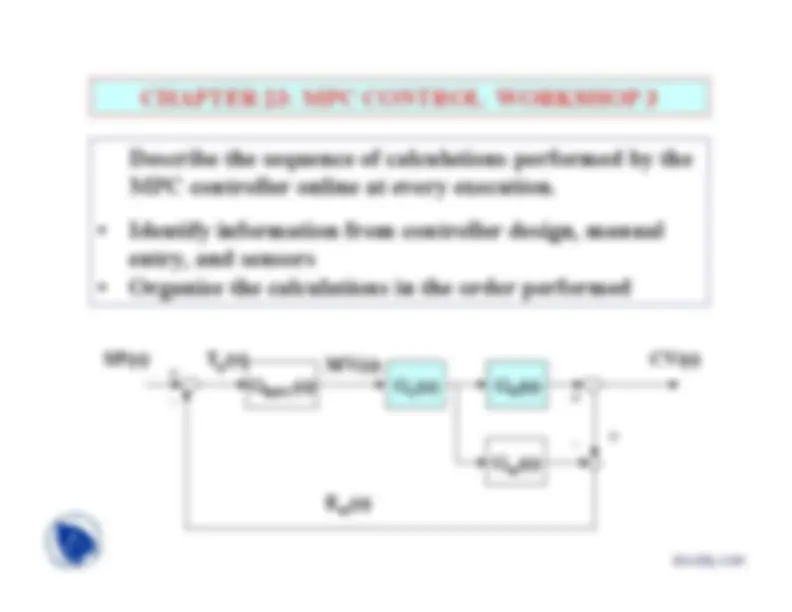
G
(s)d G
(s)P
G
(s)v
G
MPC
(s)
D(s)
CV(s)
SP(s)
MV(s)
G
m
(s)
-^
E
m
(s)
T
(s)p
CHAPTER 23: Centralized MPC Control
Centralized controller
The variables are vectors
The transfer functions are matrices
ù ú ú ú ú ú úû
é ê ê ê ê ê êë
) ( ... ...
) (
) (
) (
1 2
s
CV
s
CV
s
CV
s
CV
N^
ù ú ú ú ú ú úû
é ê ê ê ê ê êë
1 21
1
12
11
s
G
s
G
s
G
s G s G s G s G
NM
N
M
docsity.com
CHAPTER 23: Centralized MPC Control
From Chapter 19, we know that the IMC structure must
obey the following criteria.
The controller steady-state gain must be the inverse ofthe model gain.
Perfect control requires an exact inverse.
Realistic control cannot “look into the future” or invertmodels that lead to unstable controllers.
[^
]^
state
steady
s
with
Þ
(^
m
MPC
G
G
[^
-1] )
(^
s
G
s
G
m
MPC
CHAPTER 23: Centralized MPC Control
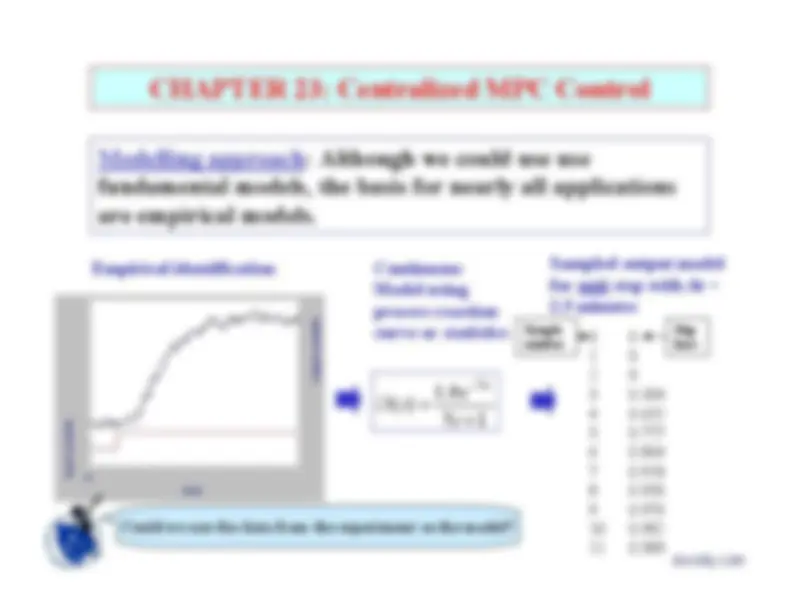
Modelling approach: Although we could use usefundamental models, the basis for nearly all applicationsare empirical models.
input variable
output variable
0
time
5
− e s
s G
s
0
0
1
0
2
0
3
4
5
6
7
8
9
10
11
Empirical identification
ContinuousModel usingprocess reactioncurve or statistics
Sampled output modelfor unit step with
∆∆∆∆
t =
2.5 minutes
Could we use the data from the experiment as the model?
Stephere
Samplenumber
docsity.com
CHAPTER 23: Centralized MPC Control
Modelling approach:1.
Inputs can be represented as a series of steps.
The effect of a step of magnitude
MV is the
magnitude times the unit step model.
The output effect of a sequence of inputs is the sum ofeach input effect.
0
50
100
150
200
250
1.5^1 0.5^0
S-LOOP plots deviation variables (IAE = 20.0383)
Time
Controlled Variable
0
50
100
150
200
250
504030 2010 0
Time
Manipulated Variable
CHAPTER 23: Centralized MPC Control
Basic controller calculation: Open-loop trajectory
G
(s)P
G
(s)v
G
MPC
(s)
CV(s)
SP(s)
MV(s)
T
(s)p
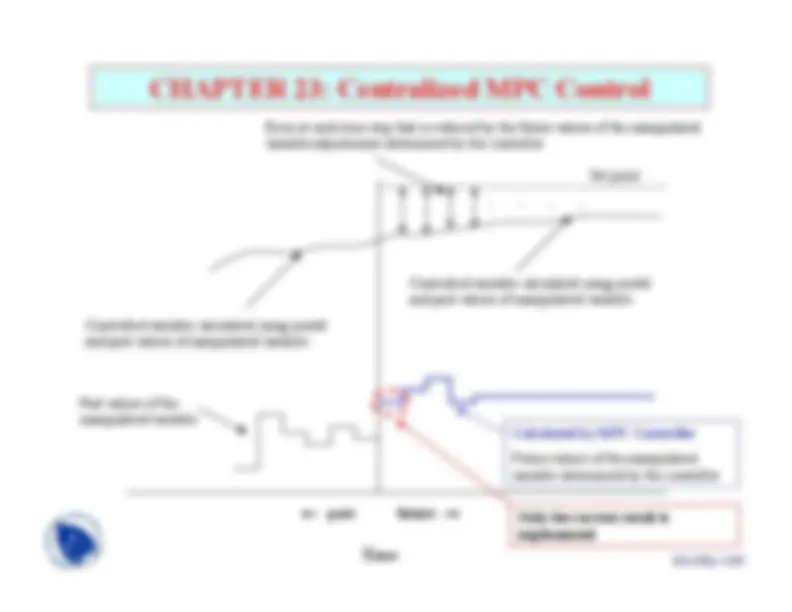
The controller calculates the manipulations in the futurethat will achieve the control objective - which for now isclosely tracking the set point.
CHAPTER 23: Centralized MPC Control
.^
.^
.^
Time
future
→→→→
←←←←
past
Controlled variable calculated using modeland past values of manipulated variable
Controlled variable calculated using modeland past values of manipulated variable
Set point
Past values of themanipulated variable
Calculated by MPC Controller Future values of the manipulatedvariable determined by the controller
Error at each time step that is reduced by the future values of the manipulatedvariable adjustments determined by the controller
Only the current result isimplemented
CHAPTER 23: Centralized MPC Control
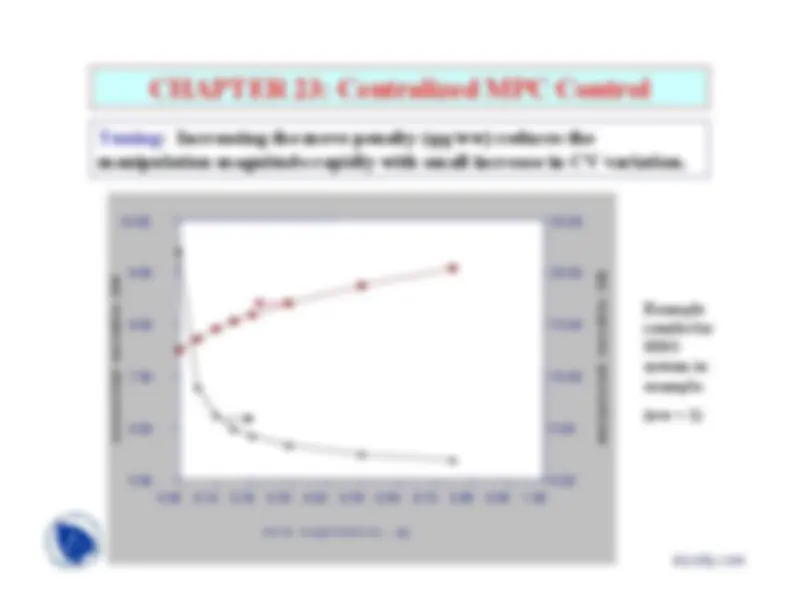
Controller calculation: Controller minimizes sum ofsquares of error.
c
c
i
samples
c i
f i
MV
CV
MV
A
to
subject
CV
E
c
=
∆
−
å
)
(
min
Quadraticobjective withlinear equations;can be solved
[
]
[
][
]
f
DMC
c
T
T
DMC
E
K
MV
A
A
A
K
Solution is leastsquares equations,involving solutionto linear equationsoffline and simplematrix-vectorproduct online.
Means minimizeby adjustingvalues of
∆∆∆∆
MV
c
Model relates ∆∆∆∆
MV
c^
to CV
c
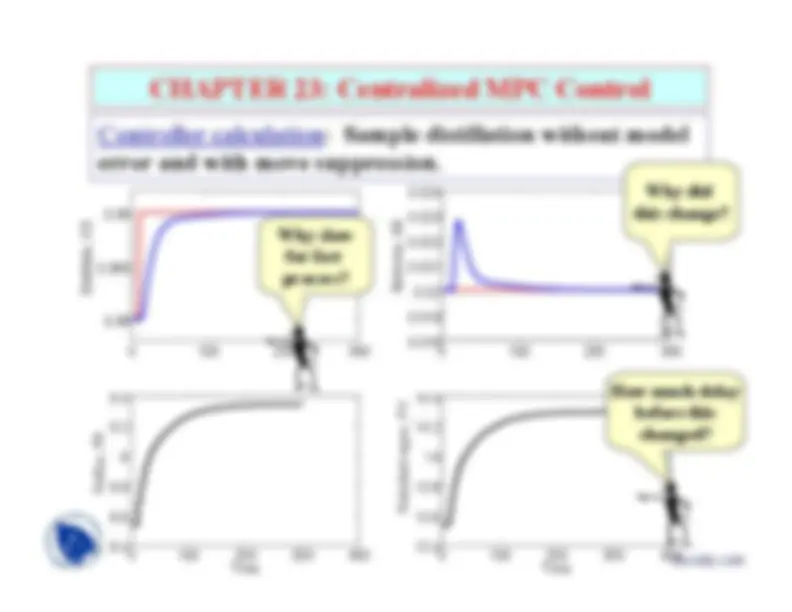
CHAPTER 23: Centralized MPC Control
Controller calculation: Example for single I/O controllerwith perfect model.
0
20
40
60
80
100
1
2
3 concentration
0
50
100
150
55 50 45
Time
valve opening
Why didn’t the CV
track the setpoint exactly? We calculatedfour steps, but only two changed;
why?
CHAPTER 23: Centralized MPC Control
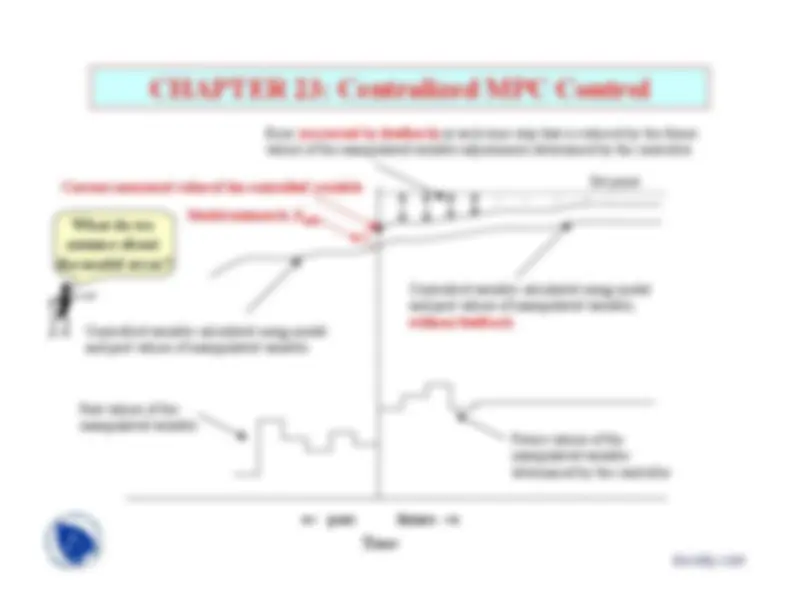
.^
.^
.^
Time
future
→→→→
←←←←
past
Controlled variable calculated using modeland past values of manipulated variable Current measured value of the controlled variable
Controlled variable calculated using modeland past values of manipulated variable, without feedback
Set point
Past values of themanipulated variable
Future values of themanipulated variabledetermined by the controller
Error
(corrected by feedback)
at each time step that is reduced by the future
values of the manipulated variable adjustments determined by the controller
Model mismatch, E
mm
What do weassume about the model error?
CHAPTER 23: Centralized MPC Control
Controller calculation: Example for single I/O controllerwith feedback; model error of 35% in gain only.
0
20
40
60
80
100
1
2
3 concentration
0
50
100
150
55 50 45
Time
valve opening
Returned to set
point; why? Diagnose thisperformance?