Download Classical Control: Impulse Response, Poles, and Stability Analysis and more Study notes Design in PDF only on Docsity!
Classical Control
Topics covered:
Modeling. ODEs. Linearization.
g
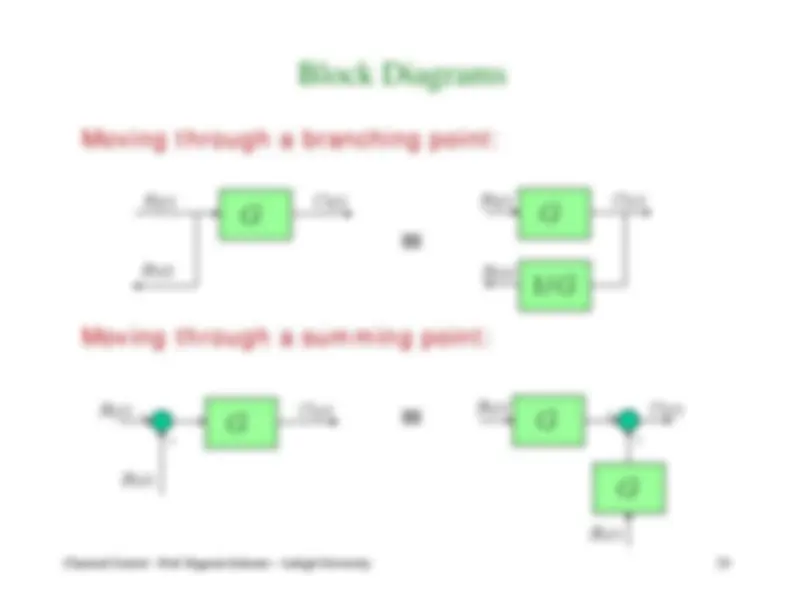
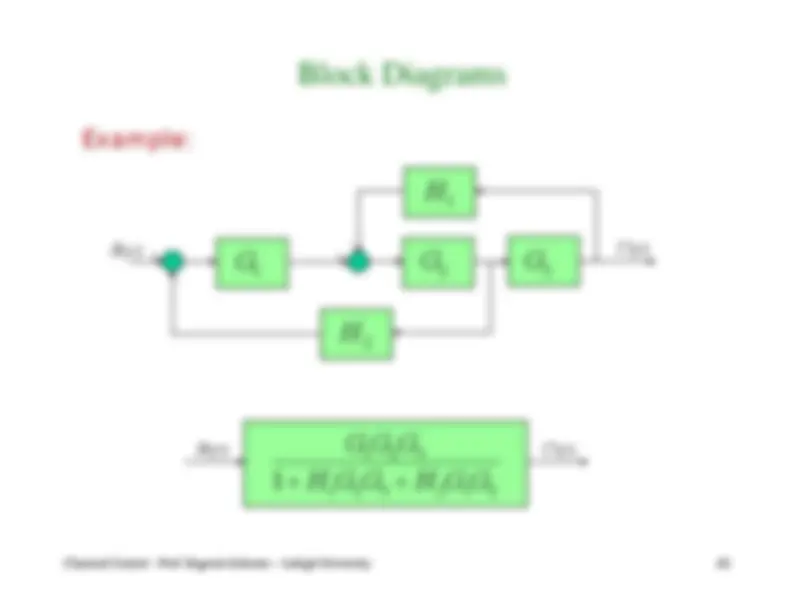
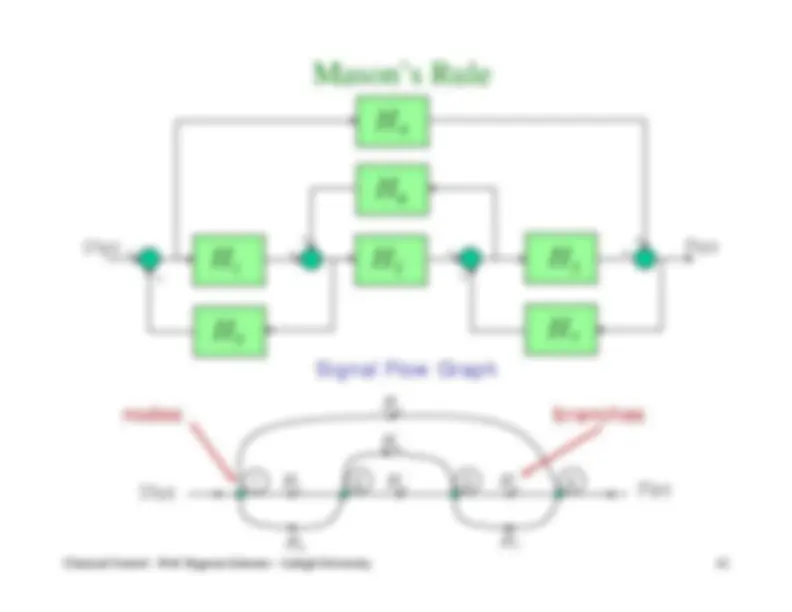
Laplace transform. Transfer functions.Block diagrams. Mason’s Rule.Time response specifications.
p^
p
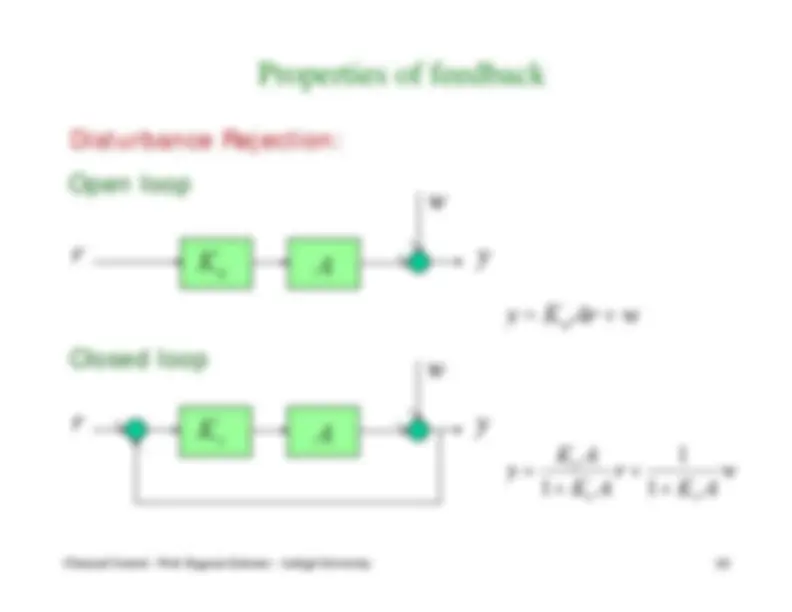
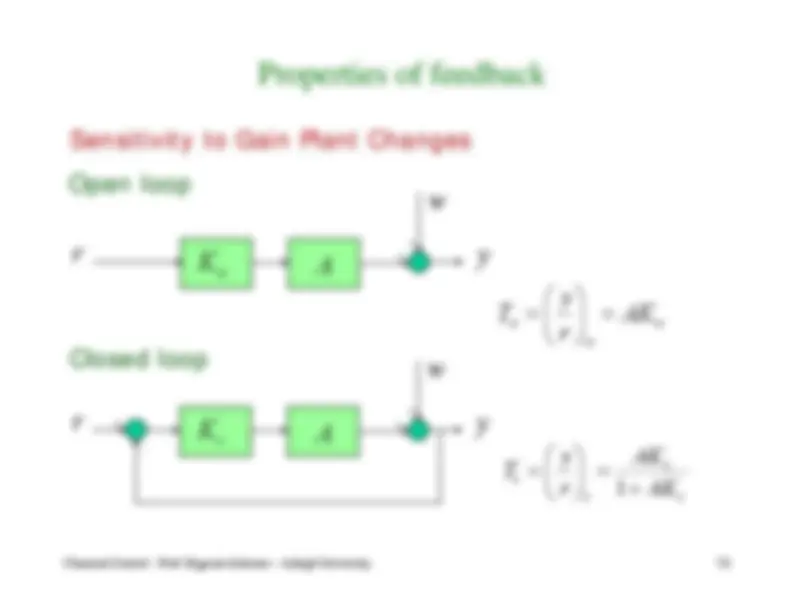
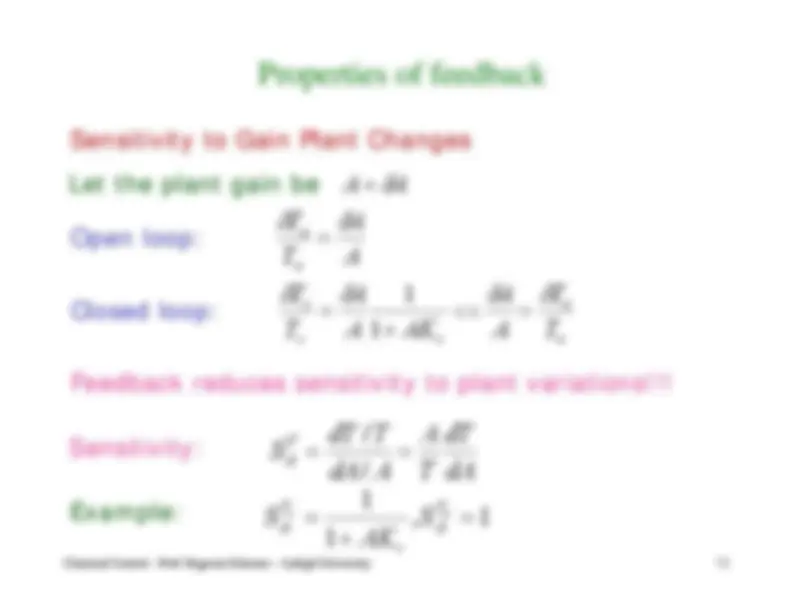
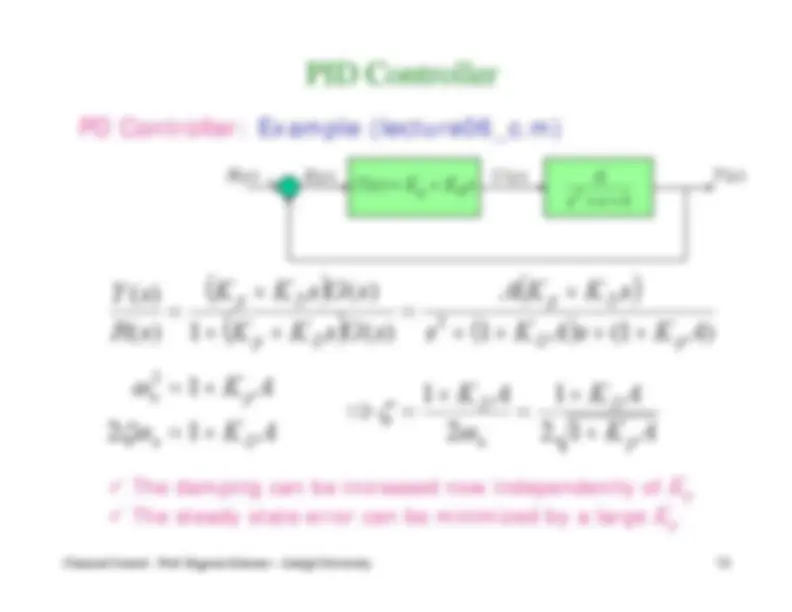
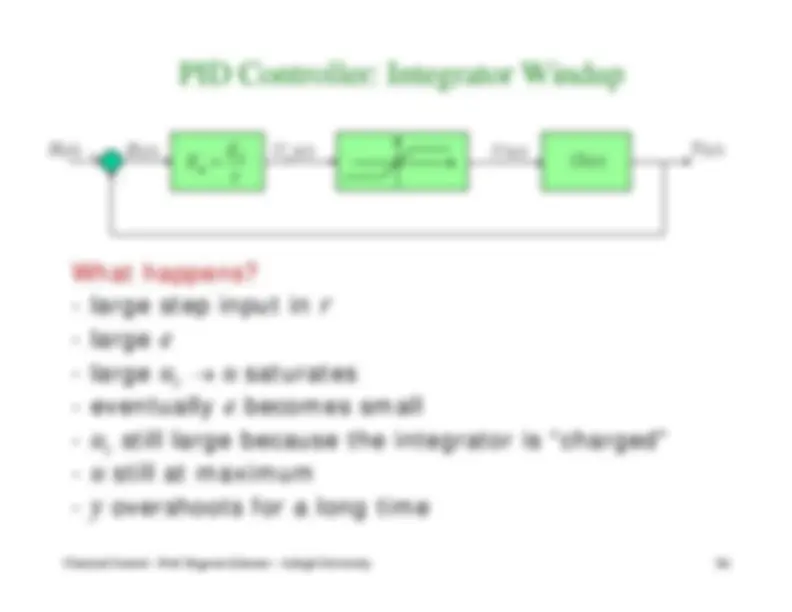
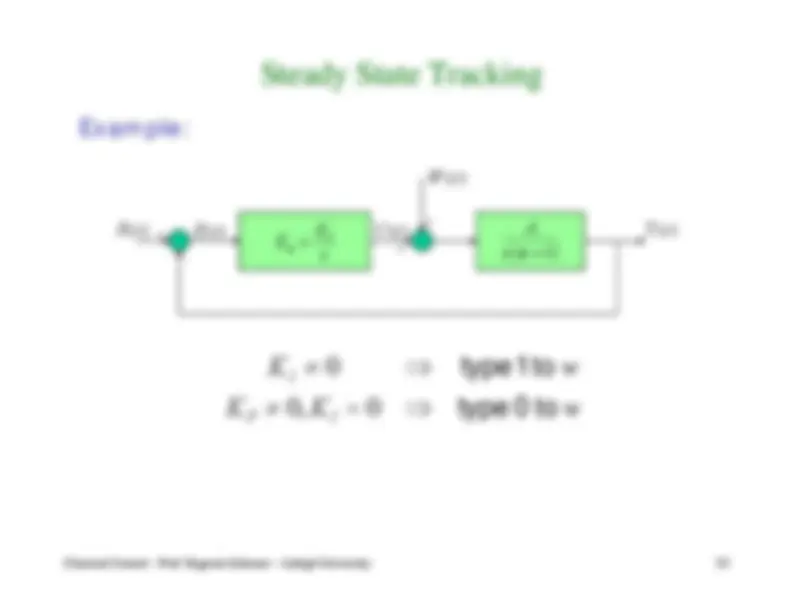
Effects of zeros and poles.Stability via Routh-Hurwitz.Feedback: Disturbance rejection, Sensitivity, Steady-state tracking.Feedback: Disturbance rejection, Sensitivity, Steady state tracking.PID controllers and Ziegler-Nichols tuning procedure.Actuator saturation and integrator wind-up.Root locus.Frequency response--Bode and Nyquist diagrams.Stability Margins Stability Margins.Design of dynamic compensators.
Classical Control
Text:
Feedback Control of Dynamic Systems, 4
th
Edition
G F Franklin J D Powel and A Emami
Naeini
4
th
Edition, G.F. Franklin, J.D. Powel and A. Emami-Naeini Prentice Hall 2002.
What is control?
O
l^
i^
t^
l
w
O
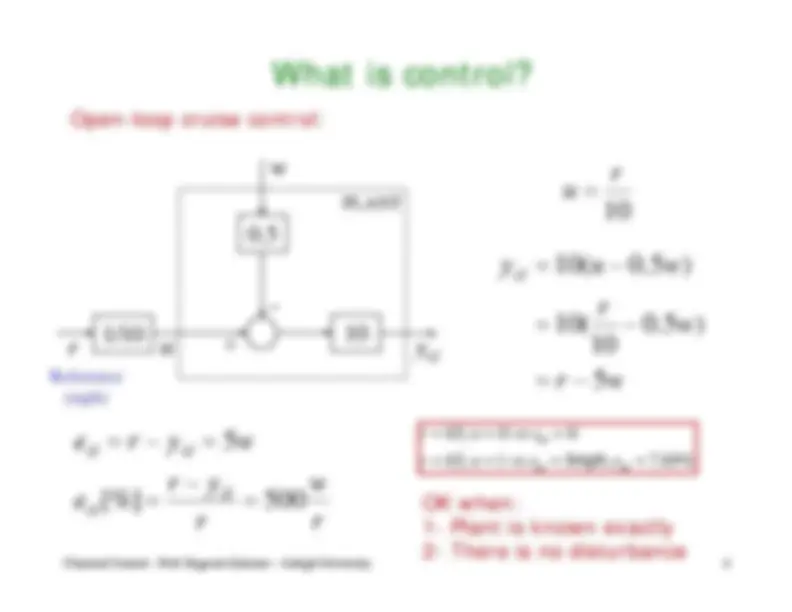
pen-loop cruise control:
r
u
w
u
y
PLANT
u
u
10
y
w
r
w
u
y
ol
(^10
1/
r^
u
y
ol
Reference
(mph)
w
r
r
w
y
r
e
w
y
r
e
ol
ol
ol
[%]
% (^69). 7
,
5
1
, 65
0
0
, 65
=
=
⇒
=
=
⇒
=
ol
ol ol
e
e
w
r
e
w
r
mph
OK
h
Classical Control – Prof. Eugenio Schuster – Lehigh UniversityClassical Control – Prof. Eugenio Schuster – Lehigh University
r
r
e
ol
[%]
OK
when: 1- Plant is known exactly2- There is no disturbance
What is control?
Cl
d l
i^
t^
l w
Cl
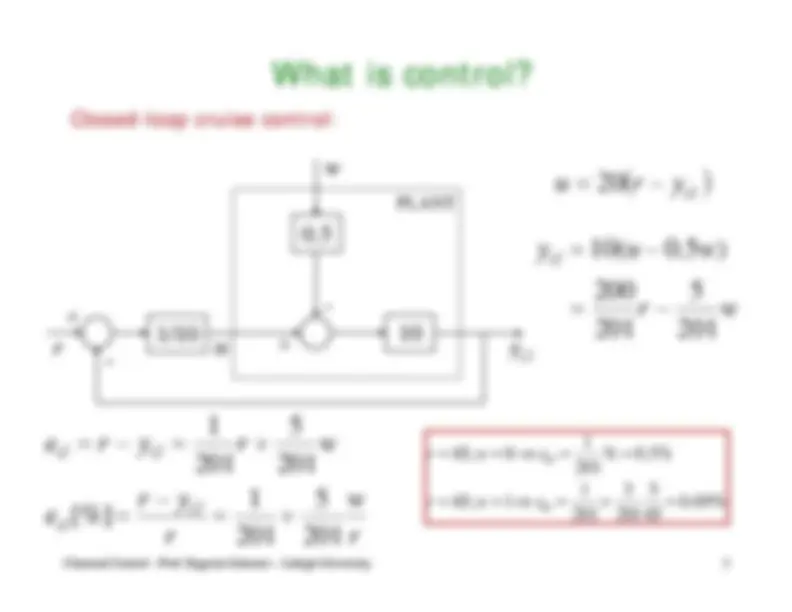
osed-loop cruise control:
(^
)l y
r
u
w
u
y
cl
PLANT
(^
) cl y
r
u
u
10
y
w
r
1/
r
u
y^ cl
r
w
y
r
w
r
y
r
e
cl
cl
% 69 0 5 5
1
1
65
% 5
. 0
% (^1201)
0
, 65
⇒
=
=
⇒
=^
ecl
w
r
Classical Control – Prof. Eugenio Schuster – Lehigh UniversityClassical Control – Prof. Eugenio Schuster – Lehigh University
w^ r
r
y
r
e
cl
cl
[%]
% (^69). 0
65 201
201
1
, 65
=
=
⇒
=^
ecl
w
r
Dynamic Models
MECHANICAL SYSTEMS:
ma
F
Newton’s law
x
v
x b
u
x m
velocity
x
v
a
&^
acceleration
m
V
u
b
T
f^
F
ti
m b
s
m
V U
u m
v b m
v
o o
e U u e V v^
st o
st o^
=
=
,
&^
T
ransfer Function
s
d dt →
Dynamic Models
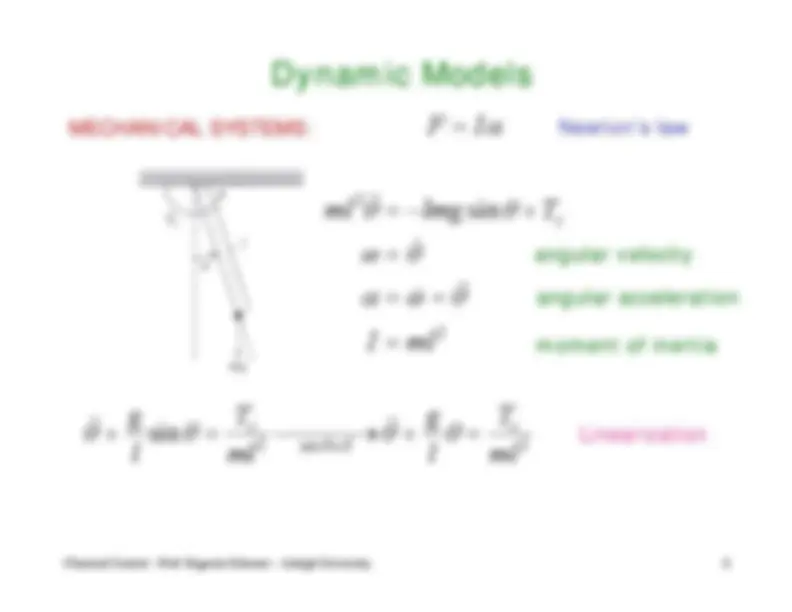
MECHANICAL SYSTEMS:
αI
F
Newton’s law
2
sin
T
lmg
ml
c
angular velocity
2 ml
I^
&^
angular accelerationmoment of inertia
ml
I^
moment of inertia
T
g
T
g
&&^
2
sin
2
sin
T ml
g l
T ml
g l
c
c^
≈
θ
θ
θ
θ
θ θ^
Linearization
Dynamic Models
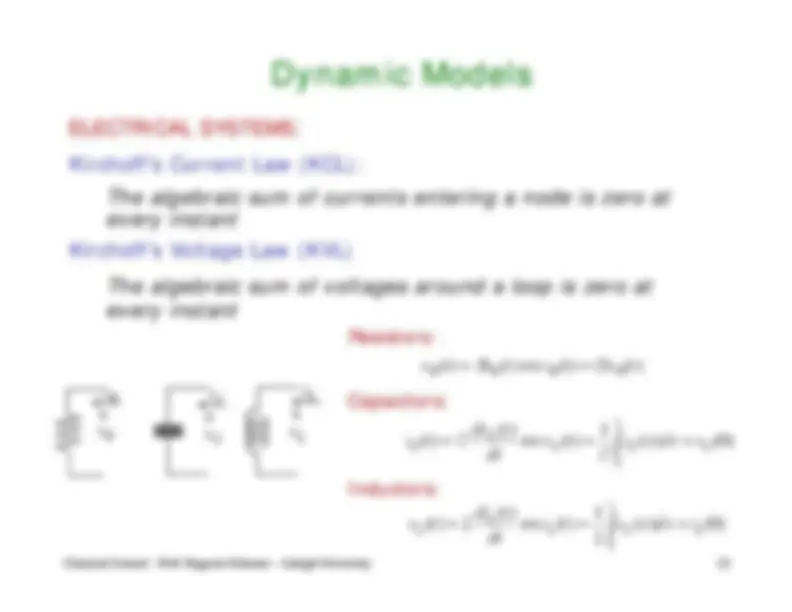
ELECTRICAL SYSTEMS:Kirchoff’s Current Law (KCL):
Th
l^
b
i^
f^
i^
d
i
Th
e algebraic sum of currents entering a node is zero at every instant
Kirchoff’s Voltage Law (KVL)
The algebraic sum of voltages around a loop is zero atevery instant
Resistors:
i^ R
i^ C
i^ L
+^
+^
) ( ) ( ) ( )
(^
t
Gv t i
t Ri t v^
R
R
R
R^
=
⇔
=
t
Capacitors:
vR
vC
vL
) 0 ( ) ( 1 ) ( ) ( ) (
0
C
t
C
C
C
C^
v d i C t v
dt
t
dv C t i^
=
⇔
=^
τ τ
Inductors:
10
∫^
=
⇔
=
t
L
L
L
L
L^
i d v L t i
dt
t di L t v
0
) 0 ( ) ( 1 ) ( ) ( ) (
τ τ
Dynamic Models
ELECTRICAL SYSTEMS:
OP AMP:
i^ p
A
v
v A
v
n
p
O
R
I
R
O A(v
v )
in
i^ O
vO
vp
n
p
i
i
v
v
+^ -^
A(v
-vnp^
)
in
vn
n
p^
i
i
To work in the linear mode we need FEEDBACK!!! To work in the linear mode we need FEEDBACK!!!
Dynamic Models
C
O
C
C
S
S
S
C
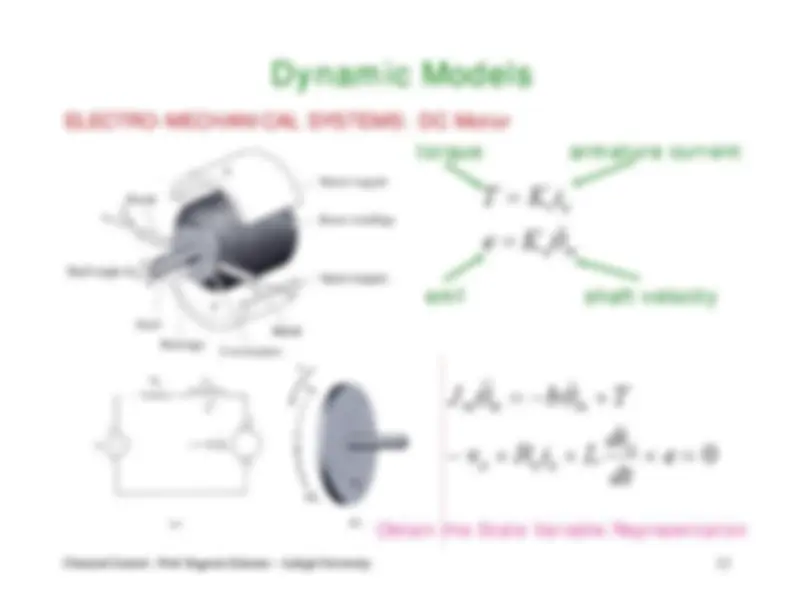
ELECTRO-MECHANICAL SYSTEMS: DC Motor
i K
T
armature current
torque
m e
a t K
e
i K
T
& θ
shaft velocity
emf
T
b
J
m
m m
e
di dt L
i R
v
a
a a
a
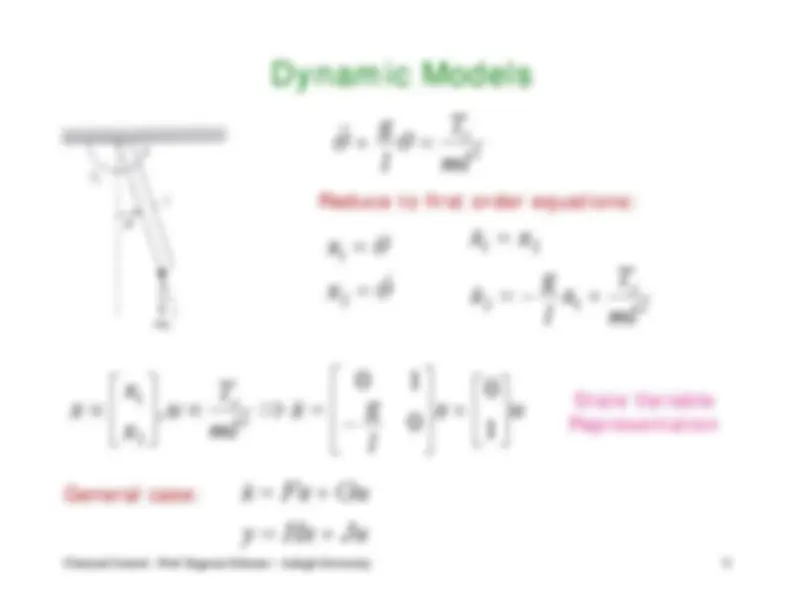
Obtain the State Variable Representation
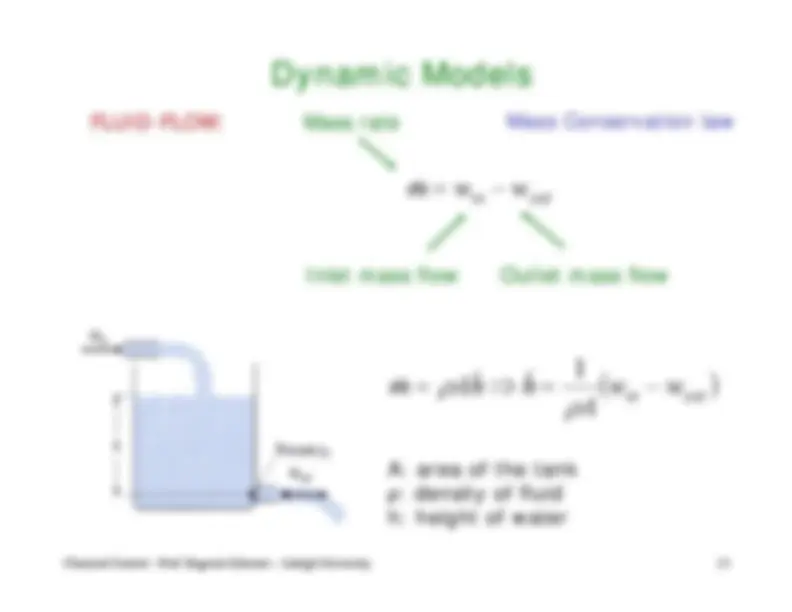
Dynamic Models
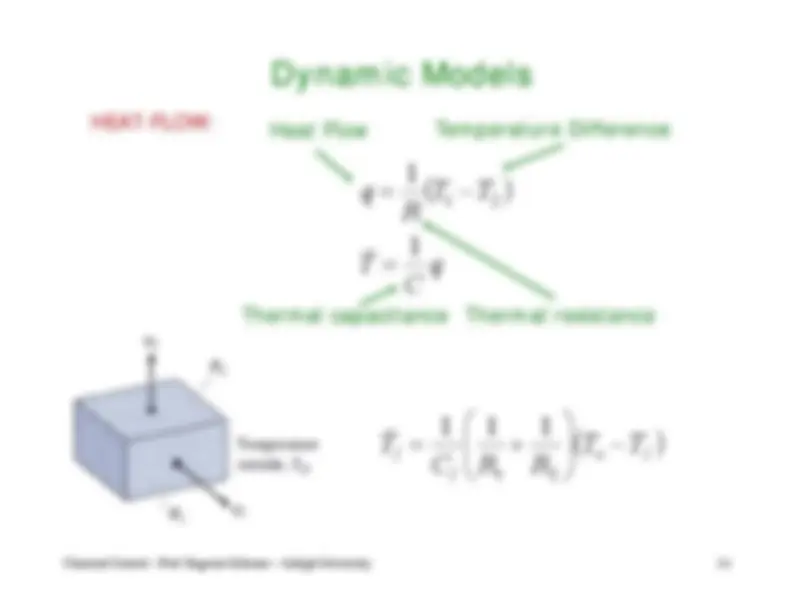
HEAT-FLOW:
(^
) T
T
q
Temperature Difference
Heat Flow
(^
)
q
T
T
T
R
q
2
1
&^
q C
T
Thermal resistance
Thermal capacitance
(^
) I
o
I
I^
T T R R C T
2
1
Linearization
(^
) u x f
x
Dynamic System:
(^
)
(^
) o
o^
u
x f^
Equilibrium
Denote
u u u x x x
δ
δ
Denote
o
o^
u u u x x x
δ
δ
(^
) u u x x f x
o
o
Taylor Expansion
(^
)^
u f x f u x f x
&^
(^
)^
u u x x u x f x o o
o o^
u x u x o o
,
,
,^
f
G
f
F
G
F
δ
δ
δ
&
o o
o o^
u x
u x^
f u
G
f x
F
,
,
,^
u
G
x
F
x
δ
δ
δ
≈ &
Linearization
f
f
f
f^
⎤
⎡^
∂
∂
⎤
⎡^
∂
∂
u
G
x
F
x
δ
δ
δ
≈ &
m
n^
f u
f u
f u
G
f x
f x
f x
F
1
1 1
1
1 1
,^
⎤ ⎥ ⎥ ⎥
⎡ ⎢ ⎢ ⎢
∂ ∂
∂ ∂
∂ ∂ ≡
⎤ ⎥ ⎥ ⎥
⎡ ⎢ ⎢ ⎢
∂ ∂
∂ ∂
∂ ∂ ≡
M
M
L
M
M
L
o o o o o o o o u x n m
n
u x
u x n n
n
u x
f u
f u
u
f x
f x
x
, 1 , , 1 , ⎥ ⎥ ⎥⎦
⎢ ⎢ ⎢⎣^
∂ ∂
∂ ∂
∂
⎥ ⎥ ⎥⎦
⎢ ⎢ ⎢⎣^
∂ ∂
∂ ∂
∂
L
L
Example: Pendulum with friction
sin
θ
θ
θ
g l
k m
l
m
x
k
g
x
x
k m
x
g l
x
xo ⎥ ⎥⎦
1
cos
Laplace transform examples
-^
Step function – unit Heavyside Function
⎧
f
Step function
unit Heavyside Function
- After Oliver Heavyside (1850-1925)
1
)
(^
∞ + − ∞ − ∞ ∞
ω
σ
t j
st
⎧ ⎨ ⎩
< ≥
=
0
for , 1
0
for , 0
) (^
t t
t u
if 1
) (
) (
0 ) ( 0 0 0
> = + − = − = = =
∞ −
−
∞ −
−
σ
ω
σ
ω
σ
s
j
e
s e
dt
e
dt
e t u
s F
t j
st
st
st
-^
Exponential function
- After Oliver Exponential (1176 BC- 1066 BC)
∞ )
(
∫^
∞
∞
∞ + − + − − −
> + = + − = = =
0
0
0 )
(
)
(^
if
1
) (
α
σ
α
α α
α
α
s
s e
dt
e
dt
e
e
s F
t
s
t
s
st t
-^
Delta (impulse) function
δ
(t)
s
dt
e t
s F
st
all
for 1
) (
) (^
=
=
−
δ
19
) (
) (
−
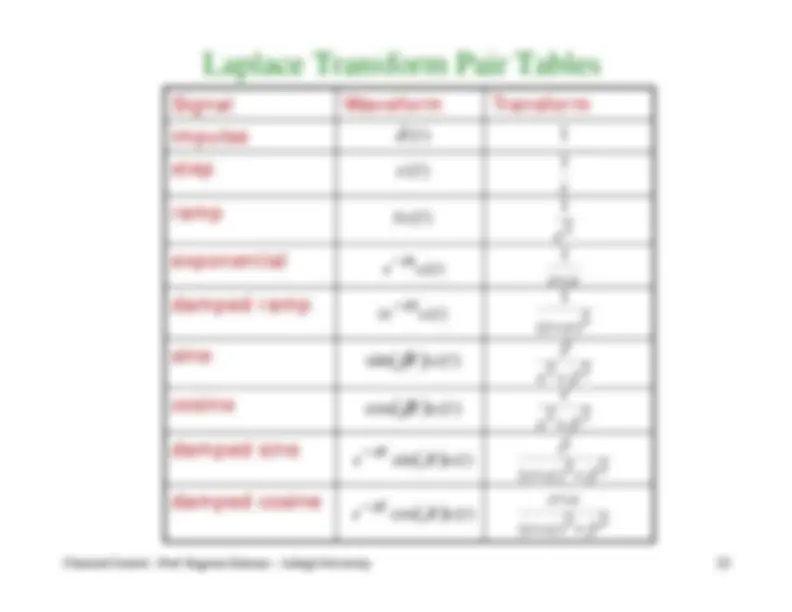
Laplace Transform Pair Tables
Signal
Waveform
Transform
g impulsestep
) (t δ^
1 1 s
) (t u
rampexponential
s (^12) s 1
) (t tu
) (tu
e^
t α −
exponential damped ramp
α+s β
(^2) )
(
1 α+ s
) (tu
e
) (tu t
te
α−
sine cosine
2
2
β^ β
s
2
2
β
s
s
(^
)^
) (
sin
t u t β (
)^
) (
cos
t u t β
damped sinedamped cosine
α+ s
2
(^2) )
(
β
α
β
+s
β
s
(^
)^
) (
sin
t u t
t e
β
α−
damped cosine
2
(^2) )
(
β
α
α +
s
s
(^
)^
) (
cos
t u t
t e
β
α−