



Clock Synchronization
Docsity.com
























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
In the class of the digital system design, we study the key concept of the:Clock Synchronization, Timing Issues, Clock Skew, Clock Distribution Network, Global Clock, Timing Parameters, Flip-Flop Changes, Clock to Output Timing, Flip-Flop Timing in Chip, Asynchronous Inputs
Typology: Slides
1 / 87

This page cannot be seen from the preview
Don't miss anything!
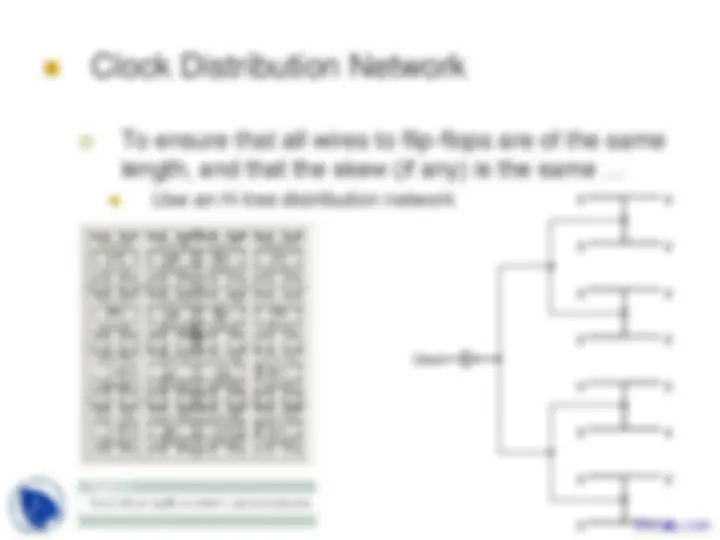
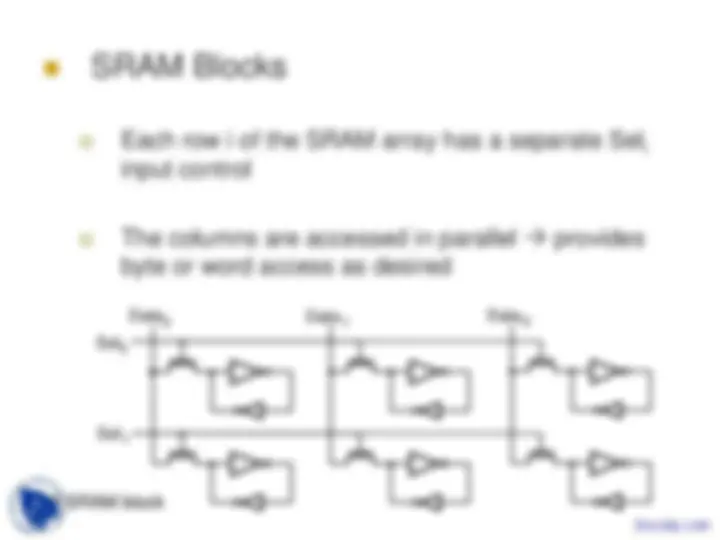
Data Clock E
Clock ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff Docsity.com
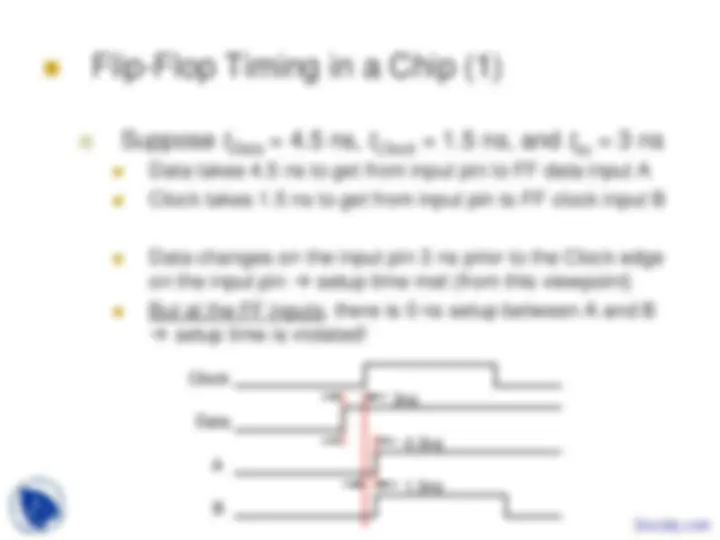
od D Q Data Clock Chip package pin A B t (^) Clock t (^) Data Out t (^) od
trd
co
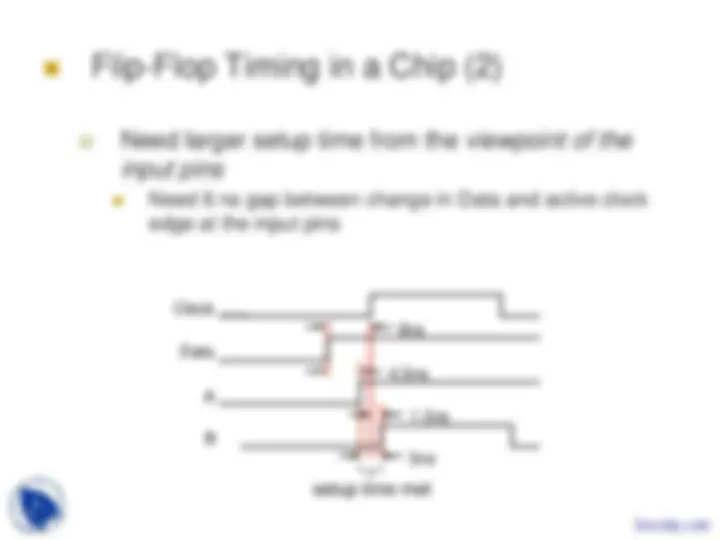
Data Clock A 6ns 4.5ns 1.5ns B 3ns