
Prepare for your exams
Study with the several resources on Docsity

Earn points to download
Earn points by helping other students or get them with a premium plan

Guidelines and tips


Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Combinatorial Auctions and Multicast Cost-Sharing: CS 286r by David C. Parkes, Study notes of Interface between Computer Science and Economics
This document from cs 286r course by david c. Parkes explores the concepts of combinatorial auctions and multicast cost-sharing. Various auction mechanisms, application domains, and multicast cost-sharing algorithms. Topics include bidding languages, iterative vs. Sealed-bid auctions, and multicast tree selection to maximize social welfare.
Typology: Study notes
2010/2011

1 / 15

This page cannot be seen from the preview
Don't miss anything!








Related documents
Partial preview of the text
Download Combinatorial Auctions and Multicast Cost-Sharing: CS 286r by David C. Parkes and more Study notes Interface between Computer Science and Economics in PDF only on Docsity!
Combinatorial Auctions
David C. Parkes
[email protected] Spring, 2002
Basics
Bidsget B (”. Auction mechanism determines thep, S) for set S ⊆ G of items, “I only want allocation A if I also, and agent payments. Variants:
- Bidding languages:– OR-of-XORS, XOR-of-ORs, restricted bundles, etc.
- Iterative vs. Sealed-bid vs. Multi-round
- Linear, Non-linear, Non-anonymous ask prices
- First-price vs. Second-price (GVA)
- Reserve price
FCC Spectrum Auction
- 51 Major Trading Areas (MTAs), 30 MHz spectrum perMTA. 492 Basic Trading Areas (BTAs), each with one 30 Mhz and four 10 MHz blocks.– 51 × 1 + 492 × (1 + 4) = 2511 items
- Clear efficiencies to aggregating licenses.– fixed cost of infrastructure, marketing, roaming synergies, etc.
- Simultaneous ascending-price auction.– prices on items
- complex activity , and stopping rules, click-box bidding.
- 1994–2001, more than $40 billion.
Auction 31: Combinatorial
- 700 MHz auction, 12 licenses (6 regions, 10 MHz and20 MHz in each)
- Diverse preferences (30 MHz for high-speed dataservice; “fill holes”; build a “national footprint”).
- Limited number of bundles, XOR-across rounds, ORwithin round, stopping rules, activity rules.
- Still debated, and still not happened.
Multicast Cost-Sharing
[FPS01,JV01] Network per-node, ( N, Ei ∈ N), cost. Source node, ce ≥ 0 per-edge, αS ∈ N e. ∈ E, value vi Task: T ∗ (^) ⊆ (^) Select receiver-setE, to maximize social welfare: R∗^ ⊆ N , and multi-cast tree W (v) = max R⊆N^ [∑ i∈R vi − (^) T ∈minT (R) e^ ∑∈T ce^ ] [EFF] where T (R) is the set of all trees that “touch” R. Self-interested receivers, private information about values.Must collect payments to balance total cost to network. Feigenbaum et al. decentralized algorithms to implement mechanisms.: assume a Universal tree, propose Jain & Vazirani propose a centralized: assume a general biconnected network, approximation mechanism.
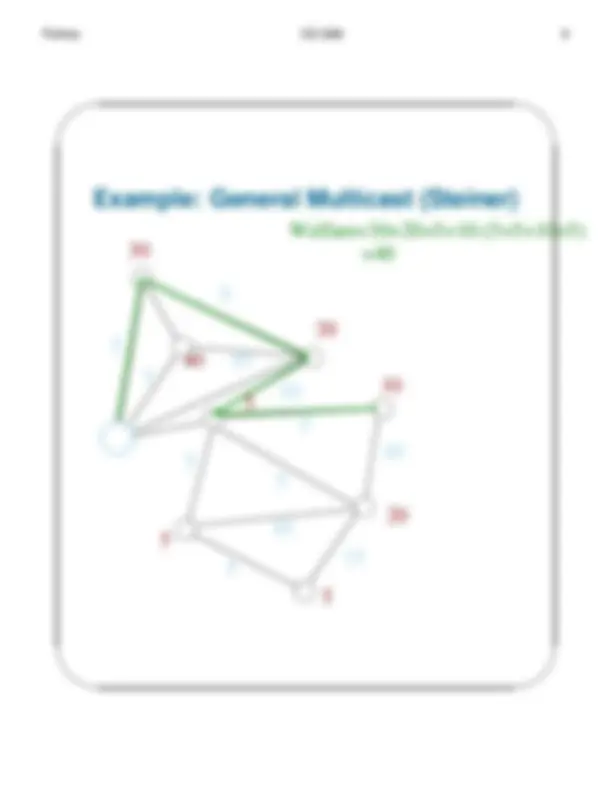
Example: Universal Tree Multicast
Welfare=40+15-(20+10)=
Mechanism Design Problem
Values,announce vi , of receivers are private information. Agentsvˆ = (ˆv 1 ,... , vˆ|N |). Propose a mechanism to compute receiversand tree T (ˆv). Let rwi(ˆiv(ˆv) (^) ) =∈ { 0 q,i (^) (ˆ (^1) v}), paymentsvi − xi(ˆv) x.i(ˆv) ≥ 0 , Desirable properties to achieve in equilibrium:[BB] ∑ [EFF] implement eff. outcome^ i∈N^ xi(ˆv) =^ ∑^ e∈T^ (ˆ (vR)^ c∗e, T ∗) [VP] [NPT] x ix(ˆiv(ˆv) (^) )≤ ≥ q i 0 (ˆv)ˆvi [CS] ri(ˆv) = 1, if vˆi large enough What about the solution concepts?
Solution Concepts
- Strategy-proof w [SP] i(vi,^ v−i)^ ≥^ wi(ˆvi,^ v−i),^ ∀v−i,^ ∀vˆi
- Group Strategy-proof for all coalitions S ⊆ [GSP] N , we have: ∀v−S , ∀vˆS wi(vS , v−S ) = wi(ˆvS , v−S ), ∀i ∈ S or ∃i ∈ S s.t. wi(vS , v−S ) > wi(ˆvS , v−S )
Distributed Implementations
[Feigenbaum et al. 01]
- VCG, or “marginal cost”. (SP) and (EFF).– pgva,i = ri(ˆv)ˆvi − (W (ˆv) − W (ˆv−i))
- propose a mechanism to compute with 2 messagesper-link (tree-traversal).
- Shapley. (GSP) and (BB).– cost-sharing function ξ(R, i) to share cost of multicast to receivers – select maximal number of receivers that can stand the R, with ∑ i ξ(R, i) = C(R) cost-share– any implementation has worst-case linear number of messages per-link Network complexity: total # msgs, max # msgs. on any link,max size msg, local comput. burden on agents.
Budget-Balanced Mechanisms for
General Multicast Tree Problem
Moulin&Shenker, 01 Class of (GSP), (BB) mechanisms defined by cross-monotone cost-sharing methods, ξ(Q, i), with properties: ∑^ ξ(Q, i) = 0,∀i^6 =^ Q i ξ^ ξ(Q, i(Q, i) ) =≥ ξ^ C(R, i(Q))∀Q ⊆ R M (ξ) mechanism:
- Agents report values, vˆ; initialize R ← N.
- Select an agentdrop i from R. i ∈ R at random, if vˆi < ξ(R, i) then
- Continue until vˆi ≥ ξ(R, i) for all i ∈ R.