



Conjugate Gradient Method
•direct and indirect methods
•positive definite linear systems
•Krylov sequence
•spectral analysis of Krylov sequence
•preconditioning
Prof. S. Boyd, EE364b, Stanford University
docsity.com



















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Dr. Hanumant Chawd delivered this lecture at Alagappa University for Convex Optimization course. Its main points are: Conjugate, Gradient, Method, Krylov, Sequence, Linear, Systems, Analysis, Preconditioning, Sparse, Direct
Typology: Slides
1 / 30

This page cannot be seen from the preview
Don't miss anything!
direct and indirect methods
positive definite linear systems
Krylov sequence
spectral analysis of Krylov sequence
preconditioning
Prof. S. Boyd, EE364b, Stanford University
docsity.com
methods to solve linear system
Ax
b
n
×
n
dense direct
(factor-solve methods)
runtime depends only on size; independent of data, structure, orsparsity
work well for
n
up to a few thousand
sparse direct
(factor-solve methods)
runtime depends on size, sparsity pattern; (almost) independent ofdata
can work well for
n
up to
4
or
5
(or more)
requires good heuristic for ordering
Prof. S. Boyd, EE364b, Stanford University
1 docsity.com
SPD system of equations
Ax
b,
n
×
n
T
examples
Newton/interior-point search direction:
2
φ
x
x
φ
x
least-squares normal equations:
T
x
T
b
regularized least-squares:
T
μI
x
T
b
minimization of convex quadratic function
x
T
Ax
b
T
x
solving (discretized) elliptic PDE (
e.g.
, Poisson equation)
Prof. S. Boyd, EE364b, Stanford University
3 docsity.com
analysis of resistor circuit:
Gv
i
v
is node voltage (vector),
i
is (given) source current
is circuit conductance matrix
ij
total conductance incident on node
i
i
j
conductance between nodes
i
and
j
i
j
Prof. S. Boyd, EE364b, Stanford University
4 docsity.com
x
⋆
−
1
b
is solution
x
⋆
minimizes (convex function)
f
x
x
T
Ax
b
T
x
f
x
Ax
b
is gradient of
f
with
f
⋆
f
x
⋆
, we have
f
x
f
⋆
x
T
Ax
b
T
x
x
⋆T
Ax
⋆
b
T
x
⋆
x
x
⋆
T
x
x
⋆
x
x
⋆
2 A
i.e.
f
x
f
⋆
is half of squared
-norm of error
x
x
⋆
Prof. S. Boyd, EE364b, Stanford University
6 docsity.com
a relative measure (comparing
x
to
τ
f
x
f
⋆
f
f
⋆
x
x
⋆
2 A
x
⋆
2 A
(fraction of maximum possible reduction in
f
, compared to
x
Prof. S. Boyd, EE364b, Stanford University
7 docsity.com
(a.k.a. controllability subspace)
k
span
b, Ab,... , A
k
−
1
b
p
b
p
polynomial
deg
p < k
we define the
Krylov sequence
x
(1)
, x
(2)
as
x
(
k
)
= argmin
x
∈K
k
f
x
) = argmin
x
∈K
k
x
x
⋆
2 A
the CG algorithm (among others) generates the Krylov sequence Prof. S. Boyd, EE364b, Stanford University
9 docsity.com
f
x
(
k
+1)
f
x
(
k
)
(but
r
can increase)
x
(
n
)
x
⋆
i.e.
x
⋆
n
even when
n
n
x
(
k
)
p
k
b
, where
p
k
is a polynomial with
deg
p
k
< k
less obvious: there is a
two-term recurrence
x
(
k
+1)
x
(
k
)
α
k
r
(
k
)
β
k
x
(
k
)
x
(
k
−
for some
α
k
β
k
(basis of CG algorithm)
Prof. S. Boyd, EE364b, Stanford University
10 docsity.com
T
orthogonal,
diag
λ
1
,... , λ
n
define
y
T
x
¯b
T
b
y
⋆
T
x
⋆
in terms of
y
, we have f
x
f
y
x
T
T
x
b
T
T
x
y
T
y
¯b
T
y
n
∑^ i
=
λ
i
y
(^2) i
¯b
i
y
i
so
y
⋆i
¯b
i
/λ
i
f
⋆
n i
=
¯b
2 i
/λ
i
Prof. S. Boyd, EE364b, Stanford University
12 docsity.com
Krylov sequence in terms of
y
y
(
k
)
= argmin
y
∈
¯ K
k
f
y
k
= span
¯b,
¯b,... ,
k
−
1
¯b
y
(
k
)
i
p
k
λ
i
¯b
i
deg
p
k
< k
p
k
= argmin
deg
p<k
n
∑^ i
=
¯b
2 i
λ
i
p
λ
i
2
p
λ
i
Prof. S. Boyd, EE364b, Stanford University
13 docsity.com
τ
k
min
deg
q
≤
k, q
(0)=
n i
=
¯y
⋆
2
i
λ
i
q
λ
i
2
n i
=
y
⋆
2
i
λ
i
min
deg
q
≤
k, q
(0)=
max
i
=
,...,n
q
λ
i
2
if there is a polynomial
q
of degree
k
, with
q
, that is small on
the spectrum of
, then
f
x
(
k
)
f
⋆
is small
if eigenvalues are clustered in
k
groups, then
y
(
k
)
is a good approximate
solution
if solution
x
⋆
is approximately a linear combination of
k
eigenvectors of
, then
y
(
k
)
is a good approximate solution
Prof. S. Boyd, EE364b, Stanford University
15 docsity.com
taking
q
as Chebyshev polynomial of degree
k
, that is small on interval
λ
min
, λ
max
, we get
τ
k
κ
κ
k
κ
λ
max
/λ
min
convergence can be much faster than this, if spectrum of
is spread
but clustered
Prof. S. Boyd, EE364b, Stanford University
16 docsity.com
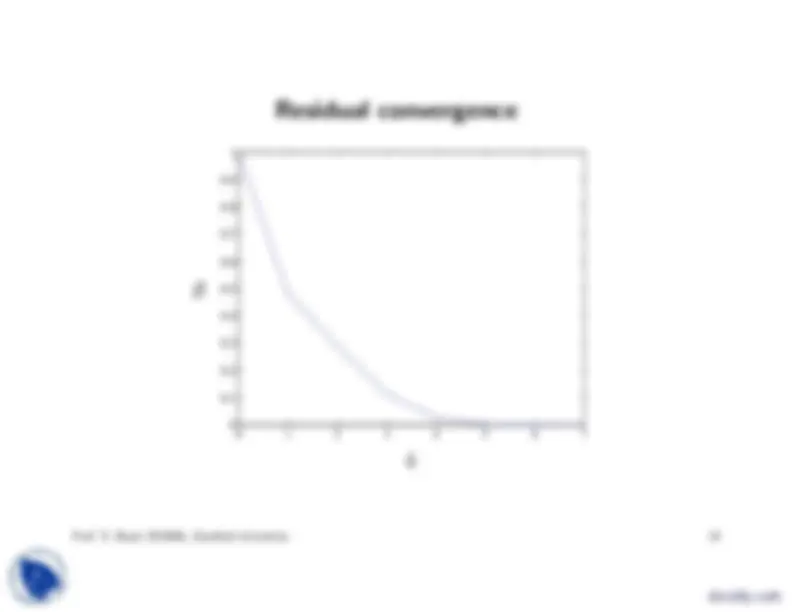
0
1
2
3
4
5
6
7
0
0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.
1
k
τ
k
Prof. S. Boyd, EE364b, Stanford University
18 docsity.com
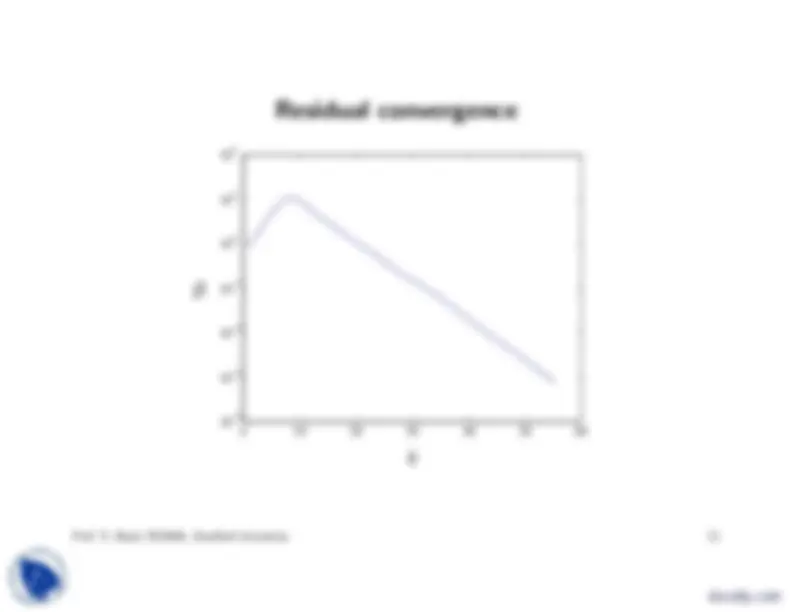
0
1
2
3
4
5
6
7
0
0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.
1
k
η
k
Prof. S. Boyd, EE364b, Stanford University
19 docsity.com