Download Control system engineering lab manual 2 and more Study Guides, Projects, Research Control Systems in PDF only on Docsity!
Department of Electrical Instrumentation & Control Engineering
EXPT-
AIM OF THE EXPERIMENT:
To study the performance characteristics of an analogue PID controller.
APPARATUS REQUIRED:
SLNO NAME OF THE APPARATUS SPECIFICATION QUANTITY 1 PID controller trainer kit 1 2 CRO 30 MHz, Dual trace 1 3 CRO Probe Crocodile type 2 4 Multimeter 1 5 Patch chord 1
CIRCUIT DIAGRAM:
THEORY:
Controllers are classified depending upon the type of controlling action used. Therefore it can be classified as (i) Proportional controller (ii) Integral controller (iii) Proportional –plus- Integral controllers (iv) Proportional –plus- derivative controllers (v) Proportional –plus- integral– plus- derivative controllers.
Department of Electrical Instrumentation & Control Engineering
Proportional control action
In a controller with proportional control action, there is a continuous linear relation between output of the controller (manipulated variable) and actuating error signal e(t) (deviation). Mathematically
m (t) =Kpe(t) According to Laplace transform M(s) =KpE(s) Kp = M(s)/E(s)
Integral control action
In a Controller with integral control action the output of the controller is changed at a rate which is proportional to the actuating error signal e (t). Mathematically, d/dt m(t) = Kie(t).Here Ki a constant. It can also be written as
m(t)= Ki ∫e(t)+m(0).
Here m(0)=control output at t=0.
SM(s) = Ki E(s) transform of above equation.
Or M(s)/ E(s)= Ki / S
Derivative control action
In a Controller with derivative control action the output of the controller depends on the rate of change of actuating error signal e (t).
M(t)=Kd d/dt e(t).
Here Kdis a constant.
m(s)=KdSE(s).
M(s)/E(s)=sKd.
Proportional –plus-integral control action
This is the combination of proportional and integral control action. Mathematically it can be represented by
m(t) = Kpe(t) + KpKi∫e(t)dt.
m(t) = Kpe(t) + Kp 1/Ti ∫e(t)dt.
Proportional –plus-integral-plus derivative control action
Department of Electrical Instrumentation & Control Engineering Ki(max)=4×f×(p-p) triangular wave output amplitude in volts/p-p square wave amplitude in volts. Where , f is the frequency of the input.
Set D- potentiometer to maximum and P-and I- potentiometers to zero. A series of sharp pulses will be seen on the CRO. This is obviously not suitable for calibrating the D- potentiometer.Instead, applying a triangular wave at the input of the error detector a square wave is seen on the CRO. Kd (max) = p-p square wave output/4×f× (p-p) triangular wave input Where ,f is the frequency of the input signal.
Set all the three potentiometers – P,I and D to maximum values and apply a square wave input of 100mv(p-p). Observe and trace the step response of thePID controller. Identify the effects of the P,I and D control individually on the shape of this response.
PROPORTIONAL CONTROL
Connect the circuit as per the circuit diagram with process made up of time delay and time constant blocks. Set input amplitude to 100mv (p-p), and frequency to a low value. For various values of Kc=0.2,0.4……… measure from the screen the values of peak overshoot and steady state error.
PROPORTIONAL-INTEGRAL CONTROL
Make connections for a 1st^ order type-0 system with time delay as per the circuit diagram. Set input amplitude to 100mv (p-p), frequency to alow value and Ki to zero. For Kc=0.6, observe and record the peak overshoot and steady state error. With the Kc as above, increase ki in small steps and record peak overshoot and steady state error.
PROPORTIONAL-INTEGRAL- DERIVATIVE CONTROL
Make connections as per the circuit diagram with proportional, integral and derivative blocks connected. Set input amplitude to 1mv(p-p),frequency to a low value, Kc=0.6,Ki=54.85(Scale setting of 0.06) and Kd= Record the peak overshoot and steady state error.
TABULATION:
Calibration result
Department of Electrical Instrumentation & Control Engineering
PI Control
Scale reading Ki(per sec) X mv Y mv Steady state error % overshoot
PID control
Scale reading
Kd(sec) X=2×steady state value
Y=2×peak response
steady state error
%overshoot
CONCLUSION:
The performance characteristic of PID Controller is studied. Time domain specifications are obtained for different values of Kc, KP, Ki.
Control Input Output Time period Frequency Kc(max )
Ki(max) Kd(max)
P
I
D
Department of Electrical Instrumentation & Control Engineering
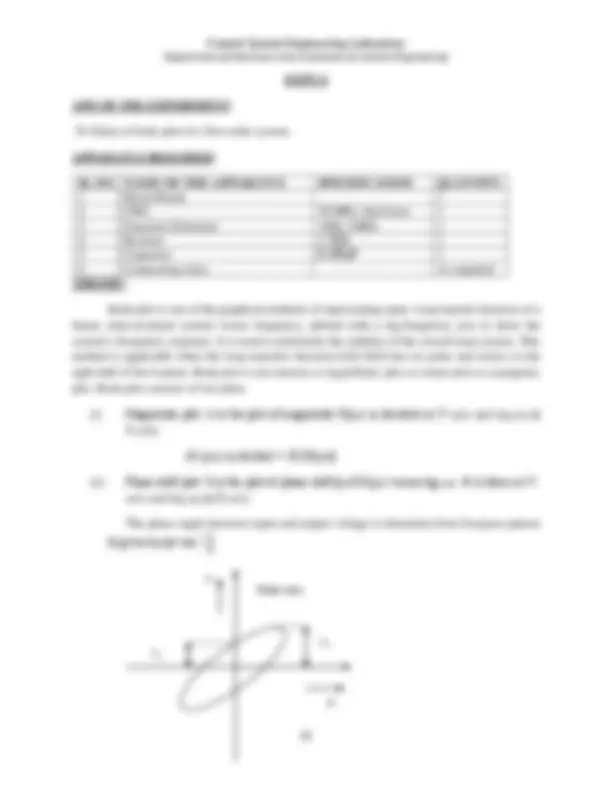
neglected to get reasonable approximation to the performance of the system. There are possibilities of oscillation if the loop gain is one with phase shift of 180^0.
The complex ratio of the fundamental harmonic component of the output to the input defines the describing function of a non linear element and it is given by.
X = Y 1 /X<Φ 1
Where X is the amplitude of the input,Y 1 is the amplitude of harmonic component of the output and Φ 1 is the phase shift of the fundamental harmonic component of the output with respect to the input.
Let x = X sin ωt be the input to a non -linear element, by Fourier series the output is given by
𝑦𝑦(𝑡𝑡) = 𝐴𝐴 0 + ∑^ ∞𝑛𝑛=1( 𝐴𝐴𝑛𝑛sinωt + 𝐵𝐵𝑛𝑛cosωt)= 𝐴𝐴 0 + ∑^ ∞𝑛𝑛=1Ynsin(n ωt + Φ (^) n)
PROCEDURE:
(a)Setting up relay characteristics:
Appropriate values of dead zone and hysteresis should be decided first. Set the CRO in the X-Y mode with dc coupling. Connect the sine wave source to plus (+) input of error detector and also to the X input of the CRO. The output of relay block is connected to the Y-input of the CRO. The value frequency may be 100HZ or 200HZ. Adjust the sine wave amplitude value of dead zone or hysteresis. It may require a setting of about 2V (P-P).The relay characteristics will be observed on the screen. Setting for dead zone and hysteresis can now be done and the values of D, H, and Mmay be measured from CRO.Record the values of D and Hfor various knob positions. With CRO switched to the sweep mode, observe the output waveform as function of the input amplitude. Trace the waveforms.
(b) Stability studies: Closed loop stability is studied by sketching the G (jω) locus and -1/N
locus on the same graph paper and then observing the intersection or nearness of the two loci.
(i)Linear system
Set up an open loop configuration consisting of the gain and system blocks. Keep again K=10 and apply a sine wave input 1V P-P. Starting from 40 HZ, obtain the magnitude and phase of G(jω) using ellipse method.Sketch the Nyquist diagram .compute and plot the Nyquist diagram for K=5 using the previous graph.
Department of Electrical Instrumentation & Control Engineering Make connections for the closed loop system using linear part and error detector. With gain setting unchanged, observe and record the time domain performance parameters like Mp, tp and ts. Take a square wave of 10-20HZ,1 volt p-p as input for this part.
(ii)Ideal Relay
Set the relay to be an ideal one with D=H=0.Sketch the -1/N(=πX/4) locus on the Nyquist diagram obtained. Connect the system output to CRO and measure the frequency and amplitude of the oscillation.
(iii) Relay with dead zone
Set K=10.record the frequency, amplitude, and wave shape of the sustained oscillation as the dead zone is increased from zero. Record the dead zone value when the oscillation stop and the system become stable. Apply square wave of 10HZ, 1V p-p to the stable system and trace the output waveform and calculate Mp,tp,ts. Set k=5 and repeat above two steps .justify your observations regarding the stability of the system.
(iv) Relay with hysteresis
The -1/N locus in this case is of the form o -1/N = Real part+jπH/ Which is a family straight lines parallel to the real axis .sketch the lines for H=0.2,0.4 and 0.6 on the Niquist diagram. Set k=10.Record the frequency, amplitude, and wave shape of the sustained oscillations as the hysteresis is set to 0.2, 0.4 and 0.6. Repeat the proceeding step for k=5 and tabulate result. Justify your observation regarding
(c)Phase plane studies:
(i)Linear system: Connections are made for the closed loop system without relay. The two
outputs, x and x are connected X and Y input of the CRO, which is kept in the X-Y mode with dc coupling. Apply a square wave input of 1V p-p at 10-40HZ and observe the equilibrium points on the CRO.Notice the two trajectories and equilibrium points correspond to positive and negative step inputs. Vary the gain k and observe how the equilibrium point is modified for some value of k, say 5,10,obtain the values of Mp and number overshoots /undershoots from the phase plane trajectory.
Department of Electrical Instrumentation & Control Engineering
(c) Non linear system stability by describing function (i) ideal relay
K fosc Ampl,p-p waveform
(ii)Relay with Dead zone only
K=10, No input applied
D, Volt fosc Ampl.p-p waveform
(iii) Hysteresis only (H=D)
K=10, input applied; Dead zone Knob at Zero
H,volt fosc Ampl.p-p waveform
CONCLUSION:
Department of Electrical Instrumentation & Control Engineering
EXPT-
AIM OF THE EXEPRIMENT:
To Study the performance characteristics of an ac servo motor angular position control system, also referred to as a carrier control system.
APPARATUS REQUIRED:
SL
NO
APPARATUS SPECIFICATION QUANTITY
1 Ac servo motor trainer kit 1 2 CRO 30 MHz, Dual trace 1 3 CRO Probes Crocodile type 2 4 multimeter 1 5 Connecting wire As required
CIRCUIT DIAGRAM:
THEORY:
Two-phase ac servomotors have been traditionally used for position/ speed control applications especially in light weight, precision instrumentation area in airborne systems. A block diagram of the system is shown in figure below. Besides introducing the basic features like balanced modulation of the error signal, phase reversal around the set point and phase difference between the reference and control phases of the motor, the experiment involves study of the step response of the closed loop system.
Department of Electrical Instrumentation & Control Engineering iii) Peak time (tp), is the time taken for the response to reach the first peak of the time response and is given by
iv) Maximum overshoot Mp, is the normalized difference between the peak of the time response and steady output. The maximum percent overshoot is defined by
𝑀𝑀𝑝𝑝 =
PROCEDURE:
1. Manual operation of position control
Ensure that the step command switch is OFF. Starting from one end move the command potentiometer in small steps and observe the the rotation of the response potentiometer. Record and plot θr, Vr, θo and Vo for a few values of Ka. Calculate θo (taking initial readings as nominal value) and plot. Also calculate the errors (∆θr - ∆θo), ∆ Vr - ∆ Vo) at each step.
2. Position control through step command
Adjust the reference potentiometer to get Vr=
Set Ka to 2.
Connect the CRO calibrate the time scale.
Apply step input .Wait till storage is complete and the response is displayed. Trace the waveform from CRO.
Compute MP, ζ, Tp,Tr, and the steady state error.
Repeat for Ka= 3,4…….
TABULATION:
Manual operation of the position control
Department of Electrical Instrumentation & Control Engineering
Ka=
SLNO ØR
Deg
ƯR
deg
Ø
deg
Ư
deg
ƯR- Ư
deg
VR
Volt
V
Volt
∆VR- ∆V
Volt
1
2
3
4
5
Step response of the position control
SLNO kA MP
%
Tp
msec
Tr
msec
ζ Vs
Volt
ess
Volt
ωn
Red/sec
CONCLUSION:
Department of Electrical Instrumentation & Control Engineering
CIRCUIT DIAGRAM:
PROCEDURE:
Connect the circuit as shown in the circuit diagram on the bread board. Connect the X-input of the CRO to the supply and connect the output of the circuit to Y-input of CRO. Apply a sinusoidal signal (Vi) of 1V of variable frequency to the circuit. Vary the frequency of the input signal from 10Hz to 1MHz keeping amplitude constant. Measure the magnitude of the output voltage V 0 from Y- channel of CRO. Determine the phase of output voltage from the Lissajous pattern. Draw the log- magnitude and phase versus frequency plots.
TABULATION:
Sl. No.
Vi in Volts
Frequency of input signal (Hz)
V 0 in Volt
Y 1 Y (^2) Ф= sin-1 𝒀𝒀𝟏𝟏 𝒀𝒀𝟐𝟐
20 log ׀ G (jω) ׀ = 20 log ( 𝑽𝑽𝑽𝑽𝒐𝒐 𝒊𝒊
CONCLUSION:
To Y input of CRO
To X input of CRO
1.5KΩ
0.1μF
Department of Electrical Instrumentation & Control Engineering
EXPT-
AIM OF THE EXPERIMENT:
To study the characteristics of a Synchro Transmitter Receiver pair and to detect angular error using Synchro Transmitter Receiver pair.
APPARATUS REQUIRED:
SL.NO. NAME OF THE APPARATUS SPECIFICATION QUANTITY 1 Synchro transmitter and receiver module
2 Patch chords As required
CIRCUIT DIAGRAM:
THEORY:
Department of Electrical Instrumentation & Control Engineering Sl.No. Rotor shaft angle θi Vs1s2 Vs2s3 Vs3s 1 0° 2 30° 3 60° 4 90° 5 120° 6 150° 7 180° 8 210° 9 240° 10 270° 11 300° 12 330°
Torque Synchro pair operation:
Connect both transmitter and receiver rotors to the excitation supply Vs on the panel. Interconnect the respective stator terminals of the transmitter and receiver, i.e, S 1 to S 1 , S 2 to S 2 and S 3 to S 3. Do not lock the receiver. Vary the transmitter rotor angle from 0° to 360° in steps of 30° and note the receiver rotor angle. The receiver should follow the transmitter rotor.
TABULATION:
Sl.No. Input shaft angle θi Output shaft angle θo 1 0° 2 30° 3 60° 4 90° 5 120° 6 150° 7 180° 8 210° 9 240° 10 270° 11 300° 12 330°
Error detector operation:
Department of Electrical Instrumentation & Control Engineering Connect the transmitter rotor terminals, R 1 and R 2 to the excitation supply Vs on the panel. Interconnect the respective stator terminals of transmitter and receiver, i.e, S 1 to S and S 2 to S 2 and S 3 to S 3. Lock the rotor. Connect receiver rotor terminals to the voltmeter on the panel. The voltmeter should be set to ‘AC’ position. Also connect CRO to display the ‘error voltage’ i.e, the voltage across the receiver rotor terminals. Vary the transmitter rotor angle from 0° to 360° in steps of 30° and record the error voltage. Note on the CRO the 180° phase change as the error voltage crosses zero.
TABULATION:
Output shaft locked at θo = 0
Sl.No. Input shaft angle θi Error Voltage Ve Demodulator Output Vd(d.c) 1 0° 2 30° 3 60° 4 90° 5 120° 6 150° 7 180° 8 210° 9 240° 10 270° 11 300° 12 330°
CONCLUSION:
The performance characteristic of Synchro transmitter Receiver pair is studied and the angular error is detected using the transmitter receiver pair.