Download Coordinate Transformation-Classical Mechanics-Assignment and more Exercises Classical Mechanics in PDF only on Docsity!
MATLAB Problem 1 (20 points) In problem set 2, you performed a coordinate transformation to align your coordinate system with the upper edge of a unit cube, the point 1,1,1. The transformation matrix was the product of the transformation matrices for each step in the process: counterclockwise rotation θ = π/ 4 about z to obtain the x�y�z�; a clockwise rotation ψ = tan^1 √^12 about y�^ to obtain the x��, y��, z��^ coordinate system. The final transformation matrix was ⎛ ⎞ ⎛ ⎞ cosψcosθ cosψsinθ sinψ. 5774. 5774. 5774 [T ] = ⎝^ −sinθ −cosθsinψ cosθ −sinψsinθ
cosψ
The inertia matrix for a cube about the origin in the x, y, z system is ⎛ ⎞ 2 / 3 − 1 / 4 − 1 / 4 M b^2 ⎝^ − 1 / 4 2 / 3 − 1 / 4 ⎠^ (2) − 1 / 4 − 1 / 4 2 / 3 .
a) Using MATLAB, apply the transformation matrix generated by the transformation to transform the inertia tensor/matrix of the cube. Show that the axes in the coordinate system x��, y��, z��^ are principal axis. What is the inertia tensor in this coordinate system? What are the x��, y��, z��^ vectors in terms of the original coordinate system x, y, z? b) Now apply the MATLAB eigenvalue process to the inertia matrix of the cube in the original x, y, z system. This process results in the eigenvalues, which are the inertias about the 3 principal axes, and the vectors which constitute the principal axes. Compare your results with those of part a). Since the 2 inertias in the plane perpendicular to the diagonal of the cube are equal, any axis in the plane is a principal axis. Therefore your numerical results could differ from your analytical results but would produce two axis directions in the plane normal to the cube diagonal. c) Sketch your results in 3 dimensions, showing the cube in the x, y, z coordinate system. Sketch the 3 principal axes obtained from both a) and b).
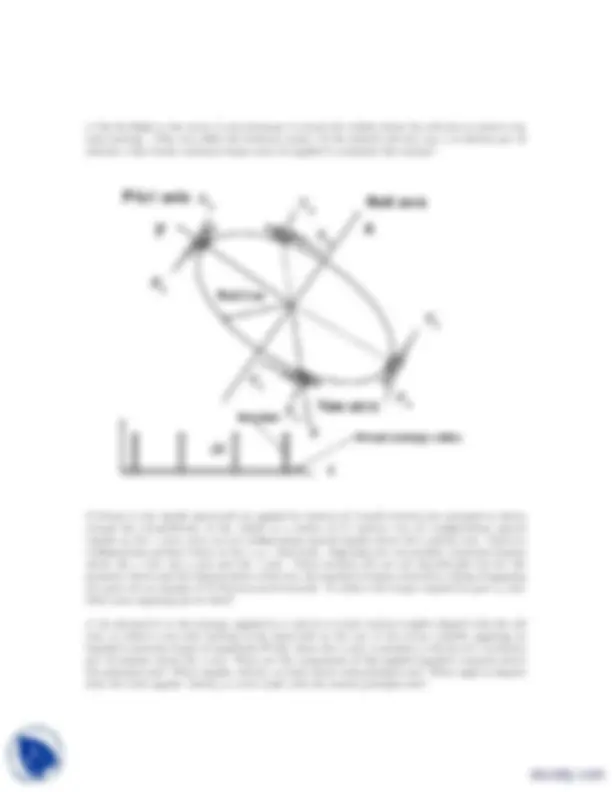
c) On the flight to the moon, it was necessary to rotate the vehicle about the roll axis to ensure even solar heating. (This was called the barbecue mode.) If the desired roll rate was 1 revolution per 10 minutes, what steady moment/torque must be applied to maintain this motion? d) Forces to the Apollo spacecraft are applied by clusters of 4 small reaction jets arranged as shown around the circumference of the vehicle at a radius of 2.1 meters; two jet configurations spaced equally on the z (yaw) axis; two jet configurations spaced equally about the y (pitch) axis. These jet configurations produce forces in the x, y, z directions. Opposing jets can produce moments/torques about the x axis, the y axis and the z axis. These reaction jets are not throttle-able but for the geometry shown and the characteristics of the jets, the impulsive torques created by a firing of opposing jets puts out an impulse of 75 Newton-meter-seconds. To achieve the torque required in part c), how often must opposing jets be fired? e) An alternative to the strategy applied in c) and d) to create motion roughly aligned with the roll axis, to achieve even solar heating of the spacecraft on the way to the moon, consider applying an impulsive moment/torque of magnitude P only about the x axis, to produce a roll rate of 1 revolution per 10 minutes about the x axis. What are the components of this applied impulsive moment about the principal axes? What angular velocity ω result about each principal axis? What angle in degrees does the total angular velocity ω vector make with the nearest principal axis?