Download Cylindrical component and more Cheat Sheet Mathematics in PDF only on Docsity!
Cylindrical Coordinate System (r-)
Yay! Another coordinate system! You’ve played with this one in calculus
classes already. Now we are going to use this system to describe curvilinear
motion.
At first glance the r-coordinate system (polar) may seem similar to the n-t
system. This is somewhat true, in that the unit vectors do change
orientation. However, in this coordinate system the origin is fixed. Rather
than describe the particle location using x and y we are going to describe it
using r and .
- (^) In 2D we call r-coordinate system “Polar Coordinates”.
- (^) In 3D we call r--z coordinate system “Cylindrical Coordinates”.
Pop Quiz?:
- (^) Are Polar and Cylindrical coordinate systems
- (^) Eulerian viewpoints
- Lagrangian viewpoints
Observations from a fixed coordinate system
Observations from a moving coordinate system
Cylindrical Coordinate System (r-)
So, when should you choose to use polar coordinates?
- (^) If you want to describe motion from a fixed position, x-y and r-are both
fine choices.
- (^) If the motion you are describing is rotating around a fixed point, then polar is a great
choice.
- (^) If the motion is described in relation to a rotation (angle change) then polar is a
necessary choice.
- (^) A vehicle going around a curve makes for an interesting argument
- You know almost all of 12.7 practice problems are Lagrangian vehicle problems.
- (^) But if you were standing at the radius of curvature you would probably choose polar
coordinates to describe the motion, velocity, and acceleration.
- (^) How about a vehicle racing down a drag strip?
- (^) Lagrangian n-t analysis is pretty simple (v and a in just the tangential direction)
Driver Perspective
- (^) Eulerian x-y analysis is pretty simple (v and a in just one direction)
Pit Crew observer on track behind vehicle
- Eularian r-analysis is less simple (v and a change in both r and )
Spectator in the stands
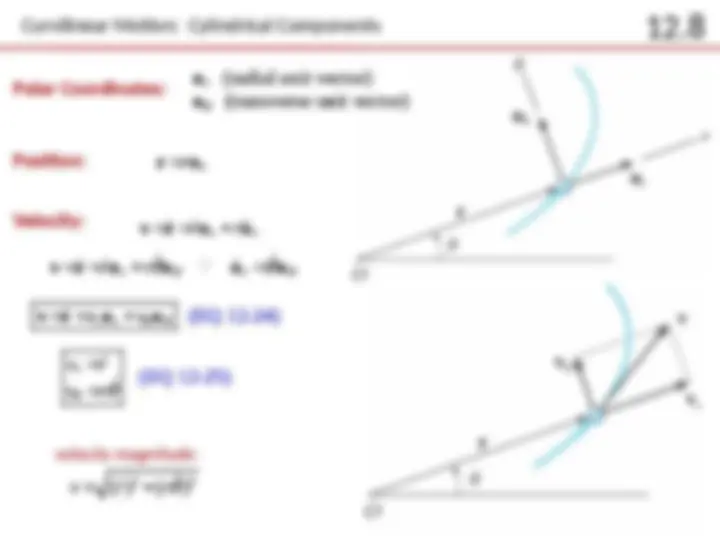
Curvilinear Motion: Cylindrical Components
Polar Coordinates:
(radial unit vector)
(transverse unit vector)
r
u
u
Acceleration magnitude:
Acceleration:
r
r r
d
r r
dt
r r r r r
a v u u
a v u u u u u
(EQ 12-28)
r r
a a
a u u
2
(EQ 12-29)
r
a r r
a r r
2 2 2
a ( r r ) ( r 2 r )
2 ( ) ( 2 ) & r r r
r r r r
a v u u u u u u
(radial unit vector)
(transverse unit vector)
r
u
u
r
r r
d
r r
dt
r r r r r
a v u u
a v u u u u u
(EQ 12-28)
r r
a a
a u u
2
(EQ 12-29)
r
a r r
a r r
2 2 2
a ( r r ) ( r 2 r )
2 ( ) ( 2 ) & r r r
r r r r
a v u u u u u u
Curvilinear Motion: Cylindrical Components
Cylindrical Coordinates :
(radial unit vector)
(transverse unit vector)
(rectangular unit vector)
r
z
u
u
u
Position:
Velocity:
Acceleration:
2 ( ) ( 2 ) (EQ 12-32) r z
r r r r z
a u u u
(EQ 12-31)
r z
r r z
v u u u
r z
r r u z u
(radial unit vector)
(transverse unit vector)
(rectangular unit vector)
r
z
u
u
u
2 ( ) ( 2 ) (EQ 12-32) r z
r r r r z
a u u u
(EQ 12-31)
r z
r r z
v u u u
r z
r r u z u
In-Class Practice Problem 1 (checking answer)
Let’s check part of our answer to the previous problem
using n-t coordinates
- (^) Assume constant velocity of 20 m/s (what direction?)
- (^) Calculate normal acceleration (what direction)?
2
(EQ 12-19)
(EQ 12-20)
t
n
a v
v
a
𝐼𝑓^ 𝑣 ˙^ =^0 ,^ 𝑎
𝑡
= 0
𝑎 𝑛
=
20 [
𝑚
𝑠
]
2
200 [ 𝑚 ]
=
400 [
𝑚
2
𝑠
2
]
200 [ 𝑚 ]
= 2
[
𝑚
𝑠
2 ]
In polar coordinates we got -2 m/s
2
. Why is this version positive?
2
(EQ 12-19)
(EQ 12-20)
t
n
a v
v
a
In-Class Practice Problem 2
Solution doesn’t even include the plot Typical
Graduate students responsible for most solution manuals
Ain’t nobody got time fo dat!
In-Class Practice Problem 2
Can do this via substitution
When , r = _____
When , r = _____
When , r = _____
2
0
In-Class Practice Problem 4
What do you notice about this problem?
Key words?
What information do you know?
What are you trying to find?
Why use polar coordinates for this problem?
What equation(s) will you use?
In-Class Practice Problem 4
Let’s check part of our answer to the previous problem
using n-t coordinates
- (^) Constant velocity of 20 m/s (what direction?)
- (^) Calculate normal acceleration (what direction)?
2
(EQ 12-19)
(EQ 12-20)
t
n
a v
v
a
𝑣 ˙=^0 ,^ 𝑎
𝑡
= 0
𝑎 𝑛
=
20 [
𝑚
𝑠
]
2
60 [ 𝑚 ]
=
400 [
𝑚
2
𝑠
2
]
6 0 [ 𝑚 ]
= 6_._ 67
[
𝑚
𝑠
2 ]
In polar coordinates we got a r
= -6.67 m/s
2 .
Why is this version positive?
2
(EQ 12-19)
(EQ 12-20)
t
n
a v
v
a