


第第第第第第第第第第第第第第第第
第第第第第第第第第第第第第第第第
第第第
第第第
第第第
第第第第第第第第第第第













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
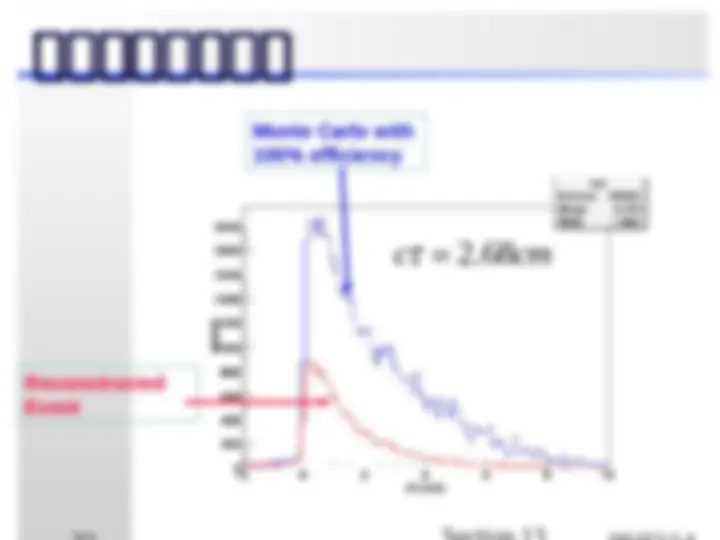
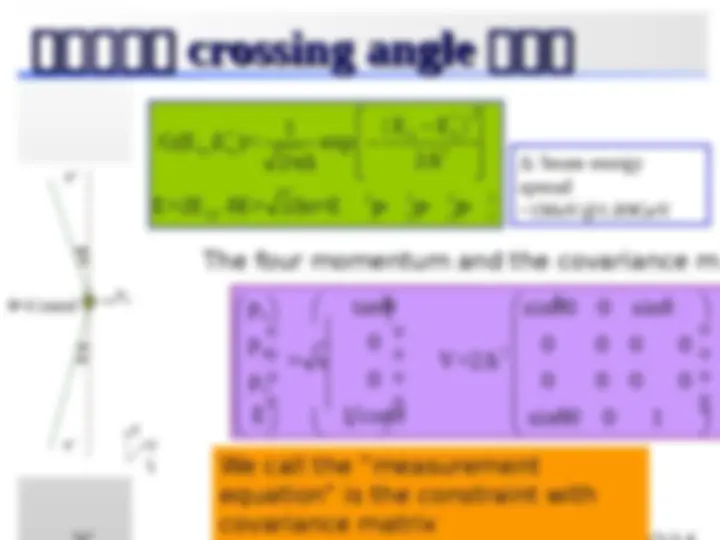
A section from a research paper or a lecture note on the kalman filter, a mathematical method used for estimating the state of a dynamic system based on noisy measurements. Various mathematical equations and notations related to the kalman filter and particle physics data analysis. It seems to discuss topics such as the measurement equation, covariance matrix, crossing angle, and beam energy spread.
Typology: Study notes
1 / 30

This page cannot be seen from the preview
Don't miss anything!
第第第 第第
第第第第第第第第
第第第第第第第第第第第第第第第
第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第 第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第第第第第第第第第第第第第第
第第第 第第第第第第第第
第第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第第第第第第第第第第第第第第
第第第 第第第第
第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第第
第第第第第第第第第第第第第第第第第第第
第第第 第第第第第第第第第第第第第第第第第
第第第第第第第第第第第
第第第第第第第第第第第第第第第第第
第第第 第第第第第第第第第
第第第第第第第第第第第第
第第第第第第
第第第第第第第
第第第第 (x p
: 第第第第第 x d
: 第第第第 )
2 2 2 2 2
0
x y z c
c
p d d
p
x x c x c
m
r
r
r r r
D d 0
H( )
H ( ) H( ) ( )
A
A A
r A r
A
A
n
r r r
n
n
H
H
H
d
H H H
H H H
H H H
D
2
1
2
1
1 2
2
2
2
1
2
1
2
1
1
1
,
( )
( )
( )
,
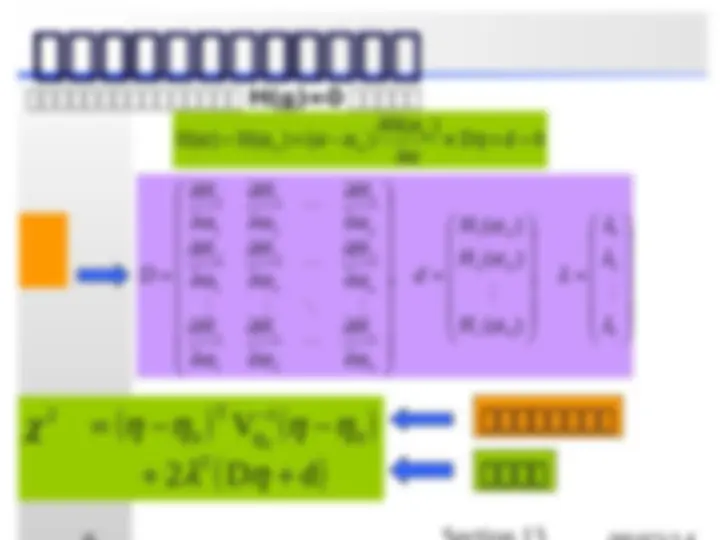
第第第第第第第第第第第第第第第 H( )=0 第第第第第
2 D d
V
T
0
1
T
0
2
0
l
y l l
T
A A
r V r r
r y A y f A
2 1 2 2
( )
2
.. (x)dx
C L f
, 2 2
2
2
exp
( )
2
2
2
2
2
2
f
2
2
2
2
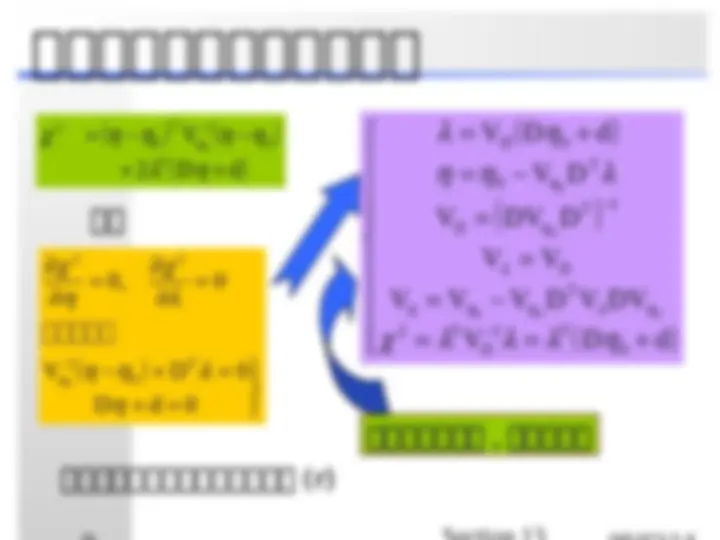
第第第第第第第第第 , 第第第第
第第第第第
第第第第第第第第第第第第第第第
第第
第第第第第第第第第第第第第 ,
第第”第第第”第第第第第第第
第第第第第第第第第第第第
第第第第第第
第第第第第第第
第第第第第第
第第 (Ks, )
第第第 (
±
±
)
第第 第第第第第第第第第 , 第
第
第第第第第第第第第第第第第第
第第第第第第”第第”
第第第第第第第第
无无无无无无无无无无无无
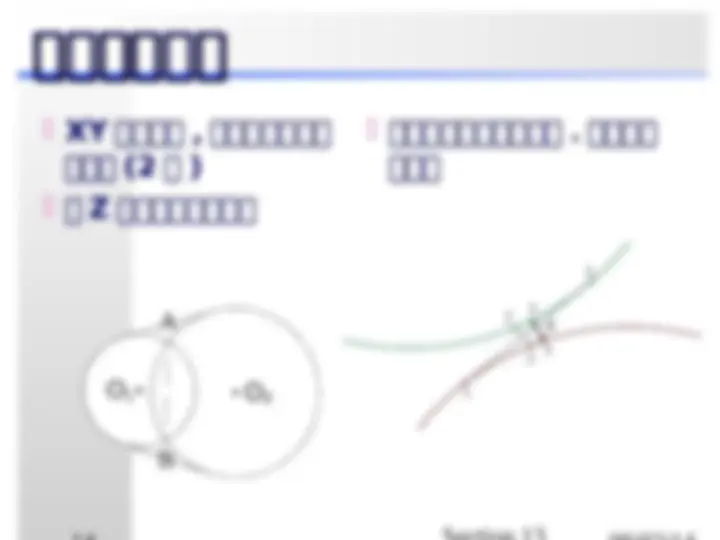
XY 第第第第 , 第第第第第第第
第第第 (2 第 )
第 Z 第第第第第第第第
第第第第第第第第第第. 第第第第
第第第
无无 smoothing 无
2
, 无无无无
第第第第第第
第第第第第第
0
0
0
x
p d
y
p d
z
p d
p
x x c
m
p
y y c
m
p
z z c
m
sin( / ) [1 cos( / )] 0
sin( / ) [1 cos( / )] 0
0
y x
p d
y x
p d
z
p d
p p
x x ac m ac m
a a
p p
y y ac m ac m
a a
p
z z c
m
无无无无 , 无无无无无无无无无无无无无无无无无
无无无无无无 , 无无无无无无无无无无无
第第第第
第 p 第 第第
第第第第
第 第 第第
第第第第第第第 , 第第第
第第第第第第第
无无无无无无无无无无无无无无无无无无无无无无无.
无无无无无 , 无无无无无无无无无无无无无无. 无无无无
无无无无无 , 无无无无无无无无无无无无无无无无