Download Design and Programming - Introduction Logic Design - Lab | EECS 270 and more Lab Reports Electrical and Electronics Engineering in PDF only on Docsity!
Prof. Jenkins and Prof. Mazumder EECS 270: Introduction to Logic Design 7-
LAB 7
Design and Programming of the M
Computer
You will learn how to design the control unit of a simple computer and how to program it in “machine” code.
1.0 Introduction
While EECS 270 is not meant to turn you into a computer designer, it does actually pro-
vide enough background in digital design to at least let you tackle the design of a simple
stored-program computer. This final lab experiment is concerned with understanding the
basic organization of a computer. You are given an instruction set architecture (ISA) and
a corresponding datapath and are asked to design the controller that will implement the
ISA on that datapath. To appreciate what you’ve accomplished, you are also asked to
write a simple program that can be executed on “your” computer.
2.0 Preparation
- Chapter 9 of Hayes (one of our reference texts) gives a good overview of computer
organization and basic architecture. Read it.
- The M270 instruction set and its particular implementation in this project will be
discussed at length in class. Do not skip these lectures!
Design Specifications LAB 7: Design and Programming of the M270 Computer
7-2 EECS 270: Introduction to Logic Design Prof. Jenkins and Prof. Mazumder
3.0 Design Specifications
M270 is an 8-bit computer with the following 16-bit instruction format:
where:
- OpCode is a 4-bit field that encodes 16 different instructions - Ra is a 2-bit destination register field - Rb is a 2-bit source register field, and - n is an 8-bit two’s complement immediate operand
M270’s instruction set architecture (ISA) is based on an 8-bit address allowing pro-
grams to access 256 bytes of primary memory (i.e. addresses 00 to FF in hexadecimal).
Source operands are designated by Y and determined using three addressing modes:
- Immediate : Yi = n - Register : Yr = Rb + n (i.e. the contents of Rb plus n) - Memory :Ym = MEM[Rb + n] (where MEM denotes the primary memory array)
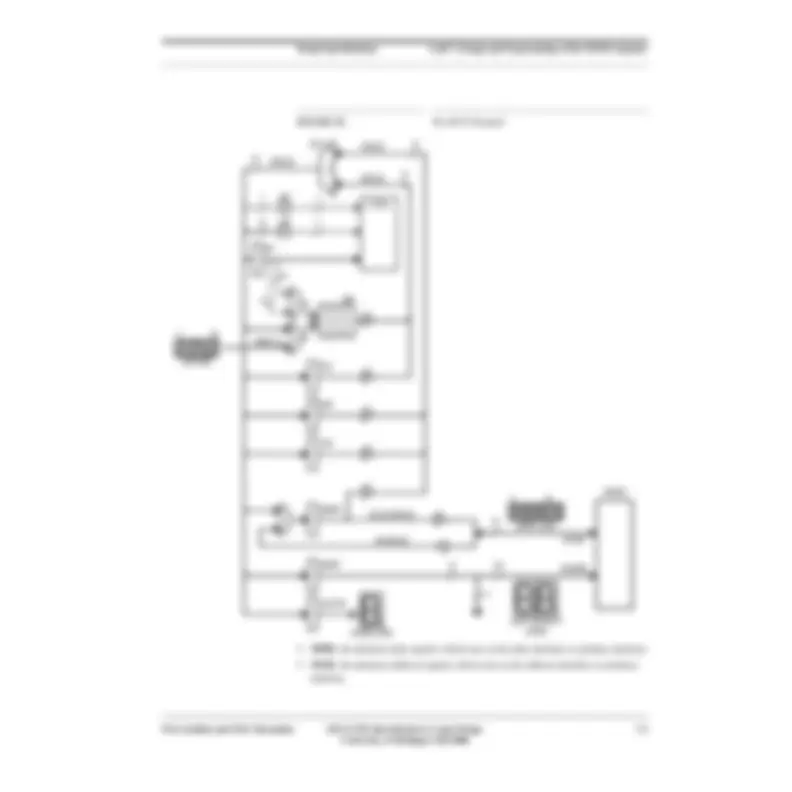
3.1 Datapath Architecture
M270 has the bus-oriented datapath architecture shown in Figure 10. The primary CPU
busses are the operand busses XBUS and YBUS and the results bus ZBUS. The inter-
face to primary memory consists of an address bus ADDR and a bidirectional DATA
bus; internally, the DATA bus is split into a DINBUS and a DOUTBUS. The major
components interconnected by these busses are:
- ALU : a multi-function arithmetic and logic unit. - NF and ZF : condition flags that get set to indicate that the result of an arithmetic
operation in the ALU is, respectively, negative and zero.
- IR : the instruction register which holds the first byte (OpCode, Ra, and Rb) of the
current instruction.
- RF : a register file consisting of 4 8-bit registers: R0, R1, R2, and R3. - PC : the program counter - NR : a register that holds the second byte of the current instruction (the immediate
operand n).
- YR : the source operand register that holds either Yr (register operand) or Ym (mem-
ory operand).
OpCode (^) Ra Rb
n
Design Specifications LAB 7: Design and Programming of the M270 Computer
7-4 EECS 270: Introduction to Logic Design Prof. Jenkins and Prof. Mazumder
The I/O interface to M270 is through the dip switches DIPSW on the input side, and the
XS40 LEDs on the output side: the settings of DIPSW can be loaded into any register in
RF, and the contents of a special output register OUTR can be displayed on the XS
LEDs (all except the most significant bit since the LED has just seven segments.)
Primary memory is a 32KB static RAM chip that resides on the XS40 board. The data
and address lines of this RAM are connected to the BAR and LEFT/RIGHT LEDs on
the XStend board as shown below:
These connections make the memory busses automatically observable and are useful for
debugging. Note that the M270 ISA allows access to just the first 256 bytes of memory;
hence MAR is connected to the least significant byte of the memory address bus
(observable on the LEFT LED) whereas the seven most significant address bits are
grounded.
3.2 Instruction Set
M270’s instruction set is shown in Table 1. For each instruction, the table gives its mne-
monic name, the values in each of its fields in hexadecimal, the effect of its execution
using “register transfer level” (RTL) notation, and a brief explanatory comment. The
instructions can be grouped into three distinct classes:
- Program control instructions that allow a program’s normally-sequential control
flow to be altered. These include three branch instructions (BRU, BRN, and BRZ)
and the HALT instruction that terminates program execution.
- Data movement instructions for loading, storing, and displaying the contents of the
register file:
- Data processing instructions that perform arithmetic (ADDR and ADDM) and logi-
cal (ANDR, ANDM, INVR, and INVM) operations on data.
INP: loads register Ra from the dip switches DIPSW LDI: loads register Ra with the immediate operand Yi = n LDR: loads register Ra with the register operand Yr = Rb + n LDM: loads register Ra with the memory operand Ym = MEM[Rb + n] STR: stores register Ra in memory location whose address is Rb + n OUT: displays register Ra on the XS40 LEDs
BAR LED LEFT LED
RAM Data Bus
RIGHT LED
RAM Address Bus
Design Specifications LAB 7: Design and Programming of the M270 Computer
Prof. Jenkins and Prof. Mazumder EECS 270: Introduction to Logic Design 7-
3.3 Register Transfer Operations
Instruction processing in M270 is accomplished by the orderly execution of a sequence
of RTL operations. The RTL operations permitted by the M270 datapath architecture
can be classified into the following three groups:
TABLE 1. M270 Instruction Set (field contents shown in hex)
Mnemonic First Byte Second Byte RTL Operation Comment 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 HALT 0 0 0 00 ____ Stop execution
BRU 1 0 Rb n PC ← Yr Branch unconditionally
BRN 2 0 Rb n PC ← Yr when NF = 1 Branch when negative
BRZ 3 0 Rb n PC ← Yr when ZF = 1 Branch when zero
STR 4 Ra Rb n MEM[Yr] ← Ra Store to memory
INP 5 Ra 0 00 Ra ← DIPSW Input from DIPSW
OUT 6 Ra 0 00 S ← Ra Output to XS40 LEDs
LDI 7 Ra 0 n Ra ← Yi Load immediate operand
ADDR 8 Ra Rb n Ra ← Ra + Yr Add from register
ANDR 9 Ra Rb n Ra ← Ra & Yr And with register
INVR A Ra Rb n Ra ← !Yr Invert register
LDR B Ra Rb n Ra ← Yr Load from register
ADDM C Ra Rb n Ra ← Ra + Ym Add from memory
ANDM D Ra Rb n Ra ← Ra & Ym And with memory
INVM E Ra Rb n Ra ← !Ym Invert memory
LDM F Ra Rb n Ra ← Ym Load from memory
Design Specifications LAB 7: Design and Programming of the M270 Computer
Prof. Jenkins and Prof. Mazumder EECS 270: Introduction to Logic Design 7-
It is important to note that the datapath architecture allows some RTL operations to
occur simultaneously as long as they do not cause resource conflicts, such as control of
ALU_ADD = 1 Enable the ALU to perform an ADD operation
TABLE 2. M270 Control Signals Component Signal Name RTL Operation Comment ALU ALU_PASSX ZBUS ← XBUS Pass value on XBUS to ZBUS ALU_PASSY ZBUS ← YBUS Pass value on YBUS to ZBUS ALU_ADD ZBUS ← XBUS + YBUS Add XBUS to YBUS ALU_AND ZBUS ← XBUS & YBUS And XBUS with YBUS ALU_CMP ZBUS ← !XBUS Invert XBUS
RF RF_ASEL RFADDR ← RF_ASEL? Rb: Ra Select address of register in RF RF_DSEL RFSRC ← RF_DSEL? INBUS: ZBUS Select source of transfer into RF RF_READ XBUS ← RF[RFADDR] Read RF RF_LOAD RF[RFADDR] ← RFSRC Load RF
PC PC_READ XBUS ← PC Read PC PC_LOAD PC ← ZBUS Load PC PC_INC PC ← PC + 1 Increment PC PC_CLEAR PC ← 0 Clear PC
IR IR_LOAD IR ← ZBUS Load IR
NR NR_READ YBUS ← NR Read NR NR_LOAD NR ← ZBUS Load NR
YR YR_READ YBUS ← YR Read YR YR_LOAD YR ← ZBUS Load YR
MAR MAR_LOAD MAR ← ZBUS Load MAR
MDR MDR_SEL MDRSRC ← MDR_SEL? ZBUS: DINBUS Select source of transfer into MDR MDR_READ YBUS ← MDR; DATA ← MDR Read MDR MDR_LOAD MDR ← MDRSRC Load MDR
MEM MEM_READ DINBUS ← MEM[MAR] Read from primary memory MEM_WRITE MEM[MAR] ← MDR Write to primary memory
OUTR OUTR_LOAD OUTR ← ZBUS Load OUTR
Design Specifications LAB 7: Design and Programming of the M270 Computer
7-8 EECS 270: Introduction to Logic Design Prof. Jenkins and Prof. Mazumder
a bus. Specifically, any ALU operation can be performed simultaneously with any mem-
ory or input operation. Additionally, the PC can be incremented independently of any
other operation.
3.5 Instruction Cycle
The M270 ISA can be implemented by the following instruction processing cycle:
The M270 datapath architecture may not allow a direct single-cycle implementation of
some of the RTL operations in the above table. For instance, memory can be accessed
only through MAR and MDR. Thus the RTL operation IR ← MEM[PC] which loads the
first byte of the current instruction into IR must be decomposed into the following three architec- ture-supported RTL operations:
The “top-level” state diagram of the M270 controller is shown in Figure 11. Its opera-
tion is controlled by three signals that are applied through the PC parallel port: Clock,
Reset, and Start. Before normal operation starts, M270 must be “reset” by asserting the
synchronous Reset input. This puts the computer into its Idle state with PC (among
other registers) initialized to 0. Normal operation is indicated by asserting Start for one
clock cycle; this initiates the fetch/generate Y/decode/execute instruction cycle. The
computer returns to its idle state upon executing a HALT instruction.
Applying the clock signal from the PC parallel port is useful for single-stepping through
program execution. If you feel that your implementation is correct and would like to run
it “at-speed”, you may use the 12-MHz on-board clock by connecting M270’s clock
input to pin 13.
Phase RTL Operation(s) Comment Fetch IR ← MEM[PC] Load first byte of instruction into IR PC ← PC + 1 Increment PC NR ← MEM[PC] Load second byte of instruction into NR PC ← PC + 1 Increment PC to point to next instruction Generate Y YR ← RF[Rb] + NR Compute Yr, the “register” operand if memory reference instruction: YR ← MEM[YR]
Compute Ym, the “memory” operand
Decode / Execute
Perform RTL operation according to Table 1
Decode and execute the instruction
RTL Operation Control Signal Settings MAR ← PC PC_READ = 1; ALU_PASSX = 1; MAR_LOAD = 1; MDR ← MEM[MAR] MEM_READ = 1; MDR_SEL = 0; MDR_LOAD = 1; IR ← MDR MDR_READ = 1; ALU_PASSY = 1; IR_LOAD = 1;
Deliverables LAB 7: Design and Programming of the M270 Computer
7-10 EECS 270: Introduction to Logic Design Prof. Jenkins and Prof. Mazumder
- An assembler for the M270 instruction set was written by R. Krishna. For details on
how to use it, check with your lab GSI. This assembler simplifies the generation of
“object” code (i.e. the .HEX file) even though for this simple ISA it is not too hard to
generate object code manually.
5.0 Deliverables
A project containing the datapath of M270 has been created for your use. Check with
your lab GSI on the logistics of copying this project into your own directory. The project
consists of two top-level schematics: M270 and RAMPORT. The M270 schematic con-
tains the entire datapath as well as an ABEL macro shell for the controller that defines
its inputs and outputs. Your primary task is to write the ABEL code that implements this
controller, and to debug it by running some test programs. The RAMPORT schematic
contains the I/O interface to the RAM chip.
An additional schematic, called MEM, is also available. MEM uses “soft” RAM32X
parts from the xc4000x library to simulate the actual RAM chip. While debugging your
controller design, you will find it easier to use MEM instead of RAMPORT since you
will be able to use the simulator to load and observe its contents. The MEM schematic
should be removed and replaced with RAMPORT once you’re ready to implement your
design and download it to the logic board.
This is a three-week lab; the due date for each of the pre-lab deliverables is noted below.
5.1 Pre-Lab (30%)
1. Hardcopy of the ABEL file that implements M270’s controller (10%; due: week of
March 27.)
2. Hardcopy of a test program that checks each of M270’s instructions. You may use
the INP and OUT instructions to inject values into M270’s registers and to observe
the results of applying each of its instructions (10%; due: week of March 27.)
3. Hardcopy of a program that sorts the numbers 7, -15, 4, -2, 25 in ascending order.
You may load these numbers into a location of your choice in memory by putting
them directly in the HEX file that contains your program. Verify that your program
is correct by displaying the numbers in sorted order using the OUT instruction (10%;
due: week of April 3.)
5.2 In-Lab (30%)
By now, you should know what you’re expected to do in-lab. For this experiment, you
need to demonstrate that your controller correctly implements all of M270’s instructions
and that your sorting program works. For an extra 10% bonus credit, demonstrate the
“at-speed” operation of your computer by using the 12MHz on-board clock.
5.3 Post-Lab (40%)
Prepare your lab report as described in the EECS270 Laboratory Overview handout.
Make sure you complete and include all parts of the report including the Cover Sheet ,
Deliverables LAB 7: Design and Programming of the M270 Computer
Prof. Jenkins and Prof. Mazumder EECS 270: Introduction to Logic Design 7-
the Design Narrative section, and the Design Documentation section. Include as part of
your design documentation all corrected pre-lab requirements.
In your design narrative, explain any difficulties encountered and how you resolved
them. Also, explain why the ZF and NF flip-flops are enabled by the ALU_ADD signal.
Finally, describe how you would modify this datapath architecture to allow a two-cycle
instruction fetch (one to load IR and one to load NR).