



Random vibration of MDOF systems -1
Docsity.com


































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Main points of this lecture are: Deterministic Excitations, Random Vibration, Equations of Motion, Input-Output Relations, Frequency Domain, Modal Expansion, Forced Vibration Analysis, Static Coupling, Inertial Coupling, Coordinate System
Typology: Slides
1 / 50

This page cannot be seen from the preview
Don't miss anything!
Docsity.com
2
Docsity.com
4
^
^
^
^
^
^
1
1
2
2
2
2
2
1
1
1
1
2
1 1^
2 2 2
2
1 1^
2 2^
1 1^
2 2
Docsity.com
5
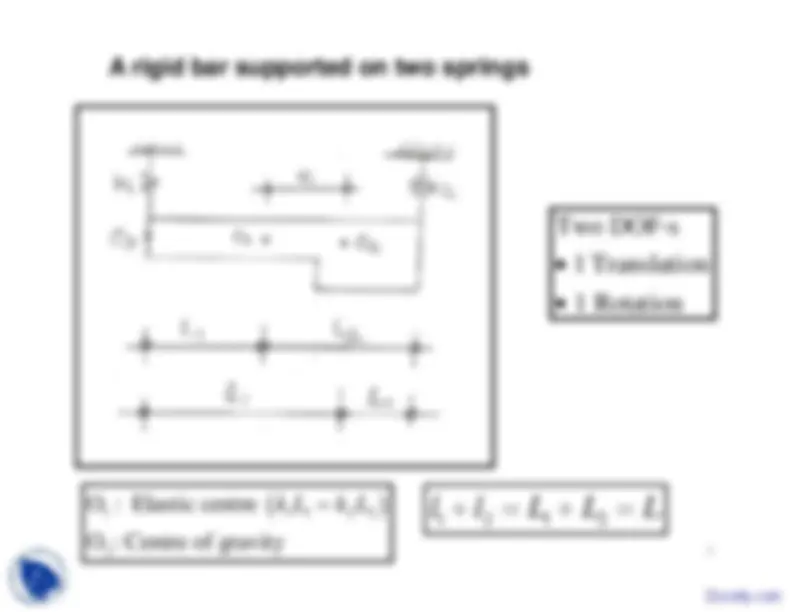
1
2
2
2
1 1
2 2 0
0
0 k^
k
m^
me
z^
z
k L
k L
me
m
^
^
^
^
^
^
^
^
^
^
^
^
^
Docsity.com
7
Docsity.com
8
Docsity.com
10
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
1 1
1
1
2
1
2
1
1
2
1
2
2 2
2
2
1
3
2
3
2
2
1
3
2
3
3 3
3
3
2
3
3
2
Docsity.com
11
^
^
^
^
^
^
^
^
^
^
^
^
^
1
1 2
2 3
3 1 1
1 1
2
1
2
1 1
2
1
2
1
2 2
2
2
1
3
2
3
2
2
1
3
2
3
2
3 3
3
3
2
3
3
2
3
1
1
1
2
2
1
1
2
2
1
2
2
2
2
3
3
2
2
2
3
3
2
3
3
3
3
3
3
3
3
0
0
0
0
0
0
0
0
0
0
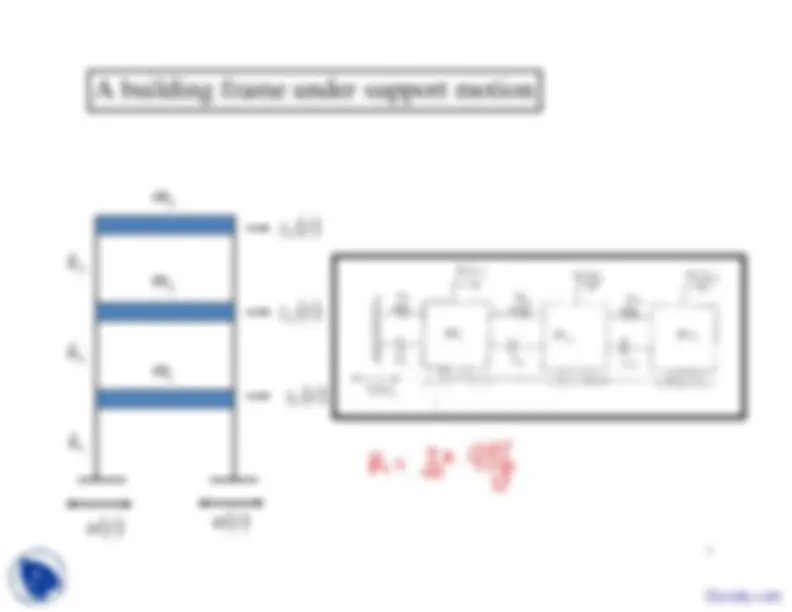
m^
x^
c^
c^
c^
x^
k^
k^
k^
x
m^
x^
c^
c^
c^
c^
x^
k^
k^
k^
k^
x
m^
x^
c^
c^
x^
k^
k^
x
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
1
2
3 0
0
1
0
0
1
0
0
1
m
m^
u m
^
^
^
^
^
^
Docsity.com
13
t
Docsity.com
14 Docsity.com
16
1
1
1
4
2
3
1
2
3
4
1
1
4
3
1
2
1
2
3
4
1
2
3 4
(^
)^
(^
)
2
2
2
(^
)^
(^
)
2
2
2
(^ / 2)
s^ (^ / 2),
s^
s^
s^
s
S
s^ s^
s
s^
s^
s^
s^
s
S
s^ s^
s a^ a s^ s^
S^
s^ s^
s
b^
b^
b^
b^
b
m^
m^
m^
m^
m
x^
tb d
m
m
m
m
d^
d^
d^
d^
d
m^
m^
m^
m^
m
y^
tb d
m
m
m
m
m^
m^
m^
A^
h
m^
A^
h^
m^
tb d
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
Docsity.com
17
3 4 3 3 2 1 12
;
12
h
I E
k
h
I E
k k k^
s s
a a^
^
^
^
2
2
(^22) (^22)
(^22) (^21) (^21) (^22) (^21) (^21)
2
2
2 2
2 2 2 2 3 2 ) ( 2
2
2
12
2
2 3
^ ^
s ss
al aa
ss
aa
s
s ss s s s ss s
ss
aa
ss s
columns slab
r hA
r hA
y hx A y x y x y
hx A
d y b x dtb
d b dtb I
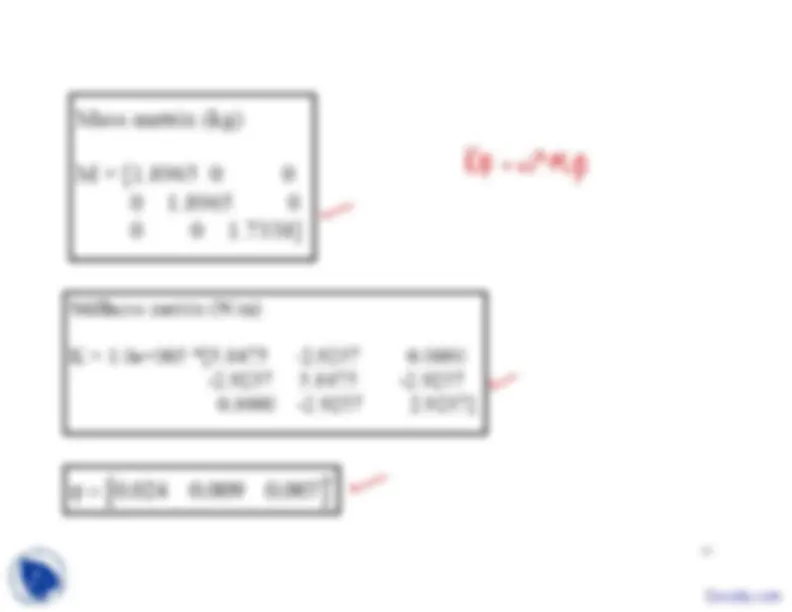
hA hA
dtb
m m m
Docsity.com
19
^
^
^
^
0
0
0
;^
0
,^
and
, in general, are non-diagonal
Equations are coupledSuppose we introduce a new set of dependentvariables
( ) using the transformation
( ) where
is a
tra
MX
CX
KX
F t
X^
X^
X^
X
M^
C^
K Z t
X t
TZ tT^
n^
n
^
^
^
^
nsformaiton matrix, to be
How to uncouple equations of motion? selected.
Docsity.com
20
^
^
^
^
^
0
0
0
;^
0
( )
( )
( )
( )
,^
, &
structural matrices in the new coordinate system.
( )
force vector in the new coord t^
t^
t^
t
MX
CX
KX
F t
X^
X^
X^
X
X t
TZ t MTZ t
CTZ t
KTZ t
F t
T MTZ t
T CTZ t
T KTZ t
T F t
MZ t
CZ t
KZ t
F t
M C
K
F t
^
^
^
^
^
^
^
^
^
^
^
^
^
inate system
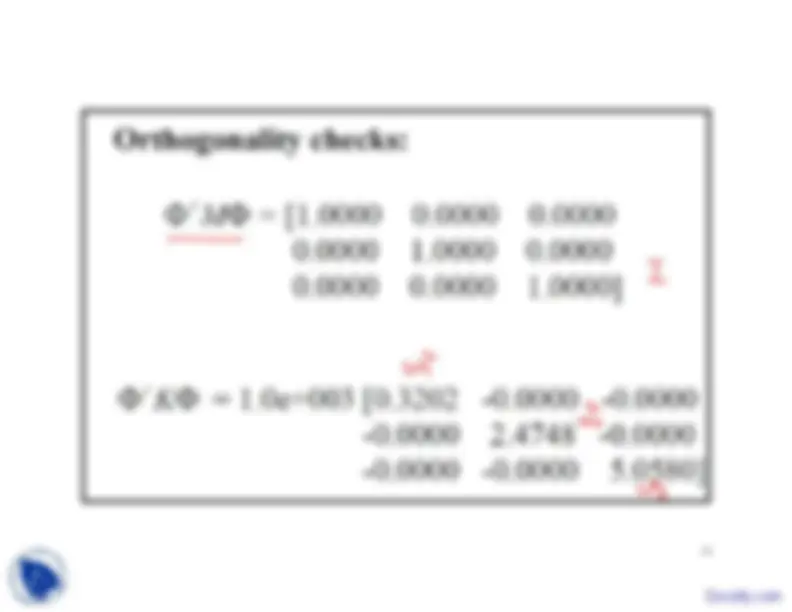
Can we select
such that
,^
, &
are all
?
If yes, equation for
( ) would then represent a set of uncoupled
equations and hence can be solved easily.
T^
M C
K
Z t
Question
DIAGONAL
Docsity.com