Download Digger-Applied Physics-Project Report and more Study Guides, Projects, Research Applied Chemistry in PDF only on Docsity!
Table of Contents
- TABLE OF CONTENTS
- ABSTRACT
- HYDRAULIC EXCAVATORS
- 1.1. I NTRODUCTION
- 1.2. MAJOR PARTS
- 1.2.1. Upper structure
- 1.2.2. Lower structure
- 1.2.3. Work equipment
- 1.3. TYPES OF HYDRAULIC EXCAVATORS
- 1.3.1. Crawler
- 1.3.2. Wheel type
- 1.3.3. Truck type
- POSITION ANALYSIS
- 2.1. COMPLEX VECTOR NOTATION
- 2.2. D IGGER ’ S COMPONENTS
- 2.3. BOOM’ S POSITION ANALYSIS
- 2.4. A RM CYLINDER A NALYSIS
- 2.5. A RM A NALYSIS
- 2.6. BUCKET TIPPING LINK AND B UCKET LINK A NALYSIS
- FORCE ANALYSIS
- 3.1. BUCKET
- 3.2. BUCKET LINK AND B UCKET C YLINDER
- 3.3. TIPPING LINK
- 3.4. A RM AND A RM CYLINDER
- 3.5. BOOM AND BOOM C YLINDER
- DESIGN OF LOAD PINS
- 4.1. LOAD PIN
- 4.2. LOAD PIN
- DESIGN OF BOOM
- 5.1. U PPER PART
- 5.2. LOWER PART
- 5.3. MIDDLE PART/ S HOULDER OF BOOM
- INTRODUCTION OF MATLAB PROGRAM
- SUMMARY
- Figure 1: Parts of digger List of Figure
- Figure 2 :Main parts of a digger
- Figure 3: Vector representation of digger's links
- Figure 4: Boom vector representation...............................................................................
- Figure 5: Arm cylinder......................................................................................................
- Figure 6" Arm vectorial reresentation
- Figure 7:Arm vectors
- Figure 8: Bucket Cylinder and Arm..................................................................................
- Figure 9: Bucket and Bucket Links
- Figure 10:Free body diagram of Bucket
- Figure 11: Free body diagram of Arm
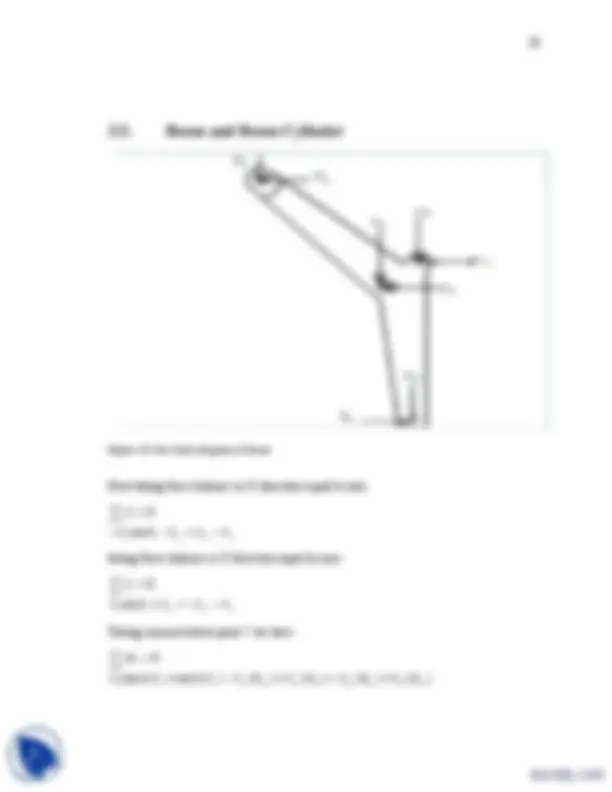
- Figure 12: free body diagram of boom
- Figure 13: double shear pins
- Figure 14: three section of the boom
- Figure 15: upper part of boom
- Figure 16: transformation axis
- Figure 17: Lower part
- Figure 18: shoulder plate design
Abstract
Hydraulic excavators are used for a variety of applications. These high-performance
excavators are especially useful for work areas that are more confined and less amenable
to conventional equipment. Hydraulic excavators are used in applications ranging from
the construction of roads and pipelines to mining and the excavation of rocks containing
diamonds and gold.
1. Hydraulic Excavators
1.1. Introduction
Hydraulic excavators are widely used in areas where conventional equipments cannot
work because of difficult location or amount of work required. Hydraulic excavators are
used for a variety of applications. These high-performance excavators are especially
useful for work areas that are more confined and less amenable to conventional
equipment. Hydraulic excavators are used in applications ranging from the construction
of roads and pipelines to mining and the excavation of rocks containing diamonds and
gold.
The work equipment portion( bucket, links, arm, cylinders and boom) of a hydraulic
excavator do the major work by using the power from engine which pushes hydraulic oil
in cylinder and this very piston and cylinder assembly is responsible for control and
operation of the digger. The work equipment is involved in the actual work of digging
and loading. Adjusting the oil level in the hydraulic cylinder can change the movement
accuracy of the working equipment.
The work of hydraulic excavator is much more dependent on the type and size of upper
structure of the excavator which include engine, fluid tank, fluid level, pump-which
presses the piston of cylinder to control and work.
1.2. Major parts
There are three major sections of a hydraulic excavator of any type;
- Upper structure
- Lower structure
- Work equipment
1.2.1. Upper structure
The upper structure of a digger consists of engine, fluid tank, cooling systems, control or
operation cabin, pumps and actuators etc
The upper structure acts as a counter weight during the operatio of the digger to avoid
instability.
The accurate and efficient and safe operation is mainly dependent upon the upper
structure’s efficiency and accuracy. This in turn is controlled by the operator of the
excavator who is residing in the control cab of the hydraulic excavator.
1.3.1. Crawler
Most popular type, widely used in small to giant sizes for operation on swamp and
muddy site, wide undercarriage is employed to reduce ground pressure.
Characteristics
- Applicable regardless of jobsite ground conditions such as soft ground and rough terrain
- Good stability
- Low travel speed (about 3 km/h): inferior mobility
- Damaging pavement
1.3.2. Wheel type
Similar to crawler construction, but tires are employed instead of crawlers.
Characteristics
- High travel speed (about 30 km/h, 18.6 mph), quick job-to-job travel
- Does not damage pavement
- Not applicable on rough and soft ground
- Poor stability
1.3.3. Truck type
Truck chassis of special design, different from an ordinary automobile, using outriggers
to ensure high stability in operation. Mobility is higher than that of wheel type.
Characteristics
- Highest travel speed with maximum speed of 50 km/h (31 mph). Long distance travel
possible.
- Does not damage pavement.
- Not applicable under adverse road.
2. Position analysis
The position analysis of the hydraulic digger can be done by taking the rigid components
and cylinders as links. Then by the linkage analysis the position of a joint in cylindrical
coordinates can be calculated. These links can be analyzed by using vector notation.
2.1. Complex vector notation
A vector can be denoted by the following notation
But in complex vector notation this vector can be denoted by
Where r is the magnitude of the vector and θ is the angle measured from +ve x-axis.
Then
If
R x y
R r θ
= +
= +
JG G JG
JG G G
i R re
θ
JG
1 2
1 2
1 2
i
i i^ i
R re
R R R
re r e r e
θ
θ θ θ
=
= +
= +
JG
JG JJG JJG
These all components can be replaced by rigid links and slider and cranks. The piston
cylinder are repalced by slide and crank mechanism. To analyze this we we draw lines
from joint to joint. These lines represent the links. The piston and cylinder become one
link as slider (piston) has only one degree of freedom of translation while the rotational
DOF is constrained by the joint pins.the piston and cylinder as a whole have rotational
DOF about joint axis.
In the figure the joints are connected by drawing lines called the links these are
represented clearly in the figue below. The vectors from R 1 to R 16 have orientations θ 1 to
θ 16. These angles are measured ralatve to horizontal x axis in counter-clockwise
diredtion.
Figure 3: Vector representation of digger's links
2.3. Boom’s position analysis
From the figure the boom has four links R3, R 4 , R 5 and R 6
Now replacing links by vectors we have by using complex vector notation
Using Euler’s equation
And
4 1 3
1 4 3
R P R
P R R
= +
= −
JJG JG JJG
JG JJG JJG
2 2 2 1 4 3 3 4 3 4
4 4 3 3 1 4 4 3 3
2 cos( )
sin sin
cos cos
p r r r r
r r Tan r r
θ θ
β θ β β θ
2 2 2 6 1 5 61 6 1
6 1 61
cos
r p r
r p
Figure 4: Boom vector representation
Now for θ 8 we have
Using complex vector notation and comparing real an imaginary parts
2.5. Arm Analysis
7 6 67
θ = θ −θ
8 7 6
R = R − R
JJG JJG JJG
8 8 7 7 6 6
8 8 7 7 6 6
cos cos cos
sin sin sin
r r r
r r r
θ θ θ
θ θ θ
7 7 6 6 8 7 7 6 6
sin sin
cos cos
r r
Tan
r r
Figure 6" Arm vectorial reresentation
Now for θ 17 we have three vectors
2 2 2 8 9 17 89 8 9
cos
2
r r r
r r
θ
θ 9 = θ 8 −θ 89
R 17 = R 9 − R 8
JJJG JJG JJG
17 17 9 9 8 8
17 17 9 9 8 8
cos cos cos
sin sin sin
r r r
r r r
2 2 2 17 9 8 9 8 8 9
r = r + r − 2 r r cos( θ −θ )
2 2 2 17 18 16 1718 17 18
cos
r r r
r r
θ
9 9 8 8 17 9 9 8 8
sin sin
cos cos
r r Tan r r
2 2 2 16 18 17 1618 16 18
cos
r r r
r r
θ
18 17 1718
16 18 1618
θ θ θ
θ θ θ
= +
= +
Figure 8: Bucket Cylinder and Arm
For θ 13 we have
2 2 2 11 16 13 1116 11 16
cos
r r r
r r
11 16 1116
θ = θ −θ
13 11 16
R = R − R
JJJG JJG JJJG
11 11 16 16 13 11 11 16 16
sin sin
cos cos
r r
Tan
r r
θ θ θ θ θ
2.6. Bucket Tipping link and Bucket Link Analysis
Figure 9: Bucket and Bucket Links
Where γ is called transmission angle and it is the directly proportional to the bucket
cylinder. If γ is small then the bucket cylinder has to exert larger force for digging and
lifting the load.
12 13
12 13
180
180
θ θ γ
θ θ γ
− + =
= − +
3. FORCE ANALYSIS
3.1. Bucket
Using equilibrium equations in X and Y direction
Adding both the equations we have
1 2
x
x x dx
F
F F F
1 2
y^0
y y dy
F
F F F
F 1 x − F 2 x + F 1 y + F 2 y = Fdy + Fdx
Figure 10:Free body diagram of Bucket
Taking moment at point 1
Taking moment at point 2
Taking moment at bucket tip
Writing in the matrix form and calculating the forces we have
14y 14x 1 14 14
14y 14x 1 14
2
14y 14x 14y 14x^2
0 0 R R ( ) ( )
R -R 0 0 ( )
P P -Q Q
x^ dx^ y^ dy^ x
x (^) dx y d
x
y
F F^ P^ F^ P
F F Q F
F
F
⎡ ⎤ ⎡ ⎤^ −^ −
y x
dy dx
Q
F F
1
2 14 2 14 14 14
0
y (^ x )^ x (^ y )^ dx (^ y )^ dy (^ x )
M
F R F R F P F P
=
2
1 14 1 14 14 14
x (^ y )^ y (^ x )^ dx (^ y )^ dy (^ x )
M
F R F R F Q F Q
∑
1 14 1 14 2 14 2 14
d
x y y x x y y x
M
F P F P F Q F Q
∑
14 14 14
14 14 14
cos(180 )
cos(180 )
x P
y P
P P
P P
θ
θ
14 14 14
14 14 14
cos(180 )
sin(180 )
x q
y q
Q Q
Q Q