شناد .م
کيتابر
قدراردا DH
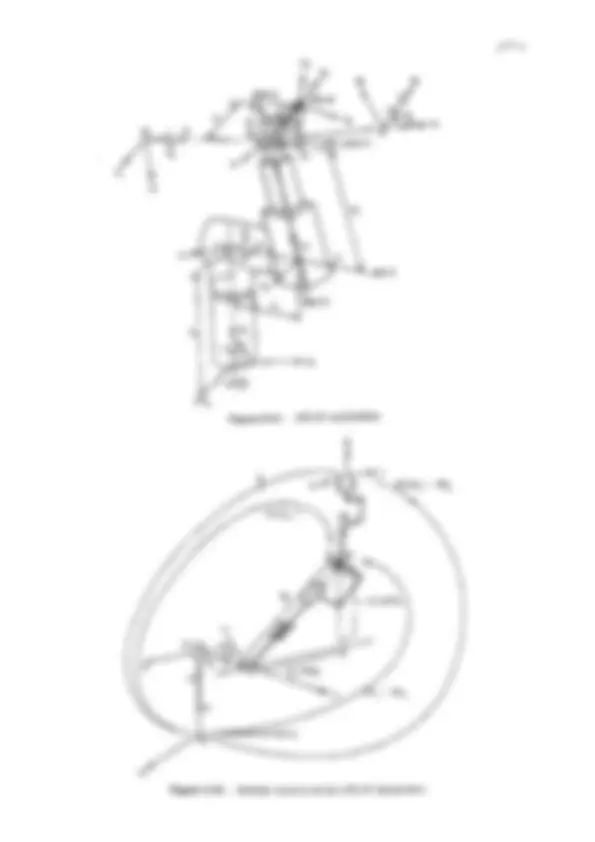
لاس رد گربنتراه و تيواند1955 شور کي ،ماظن( دنمکيتامتسيس) ود ره یياجباج سيرتام داجيا یارب
دندرک هئارا مزيناکم کي رواجم وضع. قدادرار DH (Denavit–Hartenberg convention ) یوزاب رد ًاتدمع
تابریم ارجا اهیاراد لصفم ره نآ رد هک یکيتامنيس زاب هريجنز کي دروم رد و دوش و تسا یدازآ هجرد کي
ب هیم چيپرام اي و یشزغل ،یيلاول تروصب دشابهیم راکدور؛ اما.درادن یدربراک یورک لصافم دروم رد
قدادرار DH ماگ یط:تسارجا لباق ريز یاه
1- هرامشعورش هياپ زا لصافم و اهوضع یراذگ متخ تابر یاهتنا هب و یمدوش. هرامش وضع اب هياپ رفص(0)
یاهتنا و هرامش وضع اب تابرn یم صخشمدرگ وضع .دi وضع هب تبسن ماi-1 لصفم لوح ماi تکرح(
لصفم لوط رد اي و )یشخرچi .دراد )یشزغل تکرح(
2- یم لمع ريز قيرط هب لصفم ره یور تاصتخم هاگتسد کي رارقتسا یارب.دوش
فلا- تاصتخم روحم
1-i
Z
لصفم یشخرچ روحم لوط ردiا مایم باختن وضع یيلاول لصفم یارب .دوشi
وضع هب تبسن1-i لوح
1-i
Z رادقم اب
i
یمشزغل لصفم یارب و دخرچ وضع یi وضع هب تبسن1-i
لوط رد
1-i
Z رادقمب
i
d اجباجیمش.دو