


Distributed Software Development
Synchronization
Chris Brooks
Department of Computer Science
University of San Francisco
Department of Computer Science — University of San Francisco – p.1/??


















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Material Type: Notes; Class: Distributed Software Develop; Subject: Computer Science; University: University of San Francisco (CA); Term: Unknown 1989;
Typology: Study notes
1 / 34

This page cannot be seen from the preview
Don't miss anything!
Chris Brooks
Department of Computer Science
University of San Francisco
Department of Computer Science — University of San Francisco – p.1/
In systems with multiple CPUs, the clocks are unlikely tohave the exact same time.
Variations in manufacturing cause clock skew. Insight: often, it doesn’t matter exactly what time anoperation happens, but what order events occur in. (exception: hard real-time systems)
Department of Computer Science — University of San Francisco – p.2/
Many interesting problems in distributed computing can beexpressed in terms of determining whether some property p^
is satisfied.^ Consensus^ Deadlock^ Termination^ Load balancing The general version of this problem is called the
Global
Predicate Evaluation Problem
Department of Computer Science — University of San Francisco – p.4/
For example, to detect deadlock, we construct a wait-forgraph.
Edge from process
p
toi
p
j^ if^
pi
is waiting on a message
from
p
.j
If this graph has a cycle, we have deadlock. How do we do this while the computation is running? We can’t pause the computation and collect all theinformation in one place.
Department of Computer Science — University of San Francisco – p.5/
Most of the time, we don’t necessarily care about theexact time when each event happens. Instead, we care about the order in which events happenon distributed machines. If we do care about time, then the problem becomes oneof synchronizing about the global value of a clock.
Department of Computer Science — University of San Francisco – p.7/
A process
p
consists of a series of eventsi
e
1 , e i^
2 , ... i^
There are three types of events:
Local events - no communication with other processes Send events Receive events a^
local history
is a sequence of events
e
1 , e i^
2 , ... i^
such that
order is preserved.
Department of Computer Science — University of San Francisco – p.8/
Cause and effect can be used to produce a partialordering. Local events are ordered by identifier. Send and receive events are ordered.
If^
p^1
sends a message
m
1 to
p
send
(m
must occur
before
receive
(m
Assume that messages are uniquely identified. If two events do not influence each other, even indirectly,we won’t worry about their order.
Department of Computer Science — University of San Francisco – p.10/
The
happens before
relation is denoted
Happens before is defined:
If^
kei , e
landi^
k < l
, then
e
k i^
e
l i
(sequentially ordered events in the same process) If^
ei
send
(m
and
e
j^
receive
(m
), then
e
→i
e
j
(send must come before receive) If^
e^
e
′^ and
e
e
′′, then
e
e
′′
(transitivity) If^
e^
e
′^ and
e
e
, then we say that
e
and
e
′^ are
concurrent. (
e||
′e
These events are unrelated, and could occur in eitherorder.
Department of Computer Science — University of San Francisco – p.11/
Arrows indicate messages sent between processes. Causal relation between events is easy to detect Is there a directed path between events?^1 e^1
e
4 3
(^2) e 1 ||e
1 3
Department of Computer Science — University of San Francisco – p.14/
The
frontier
of the cut is the last state in each process.
We’ll use a cut to try to specify the global state of acomputation at some point in time ... A
run
is a total ordering over events that is consistent with
each local history.
A distributed computation can have many runs.
Department of Computer Science — University of San Francisco – p.16/
So how can we use all of this to solve the GPE problem? We want to know what the global state of the system is atsome point in time ... Solution 1: Create
p
, the 0
monitor
process.
The monitor sends each process an ’inquiry’ message. Each process responds by sending its current local state σi Once all local states are received, these define the frontierof a cut. This cut is the global state. Will this work?
Department of Computer Science — University of San Francisco – p.17/
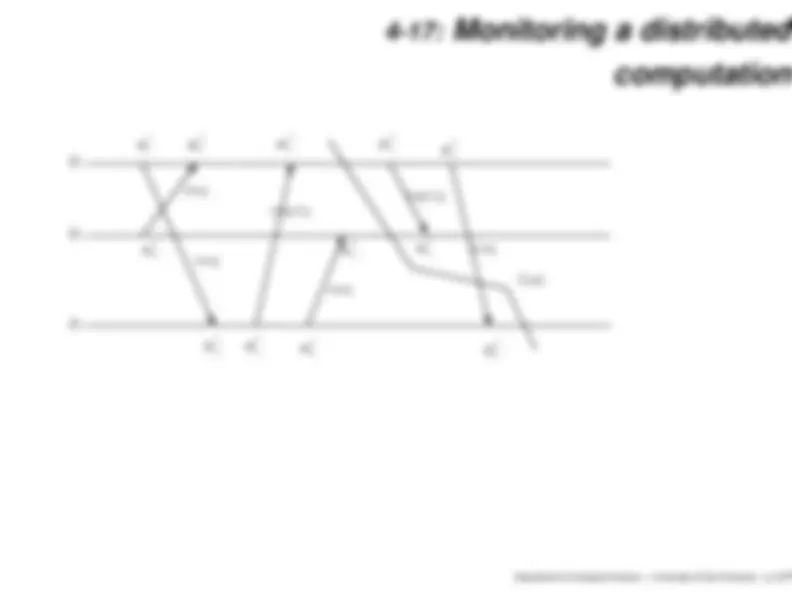
p^1 p^2 p^3
(^1) e 1
(^2) e 1
(^3) e 1
(^4) e 1
(^1) e 2
(^2) e 2
(^3) e 2
(^1) e 3
(^2) e 3
(^3) e 3
(^4) e 3 (^5) e 1
Cut
req req
reply
req
reply
req
Department of Computer Science — University of San Francisco – p.19/
Suppose
p
1 receives the monitor message after
e
p
2
after
(^2) e 2 , and
p
3 after
e
The WFG has edges (1,3), (2,1), (3,2). The system is not really deadlocked, though; the monitorreceived an inconsistent picture. This is called a ghost deadlock. Problem: process
p
’s state reflects receiving a message 3
that (according to the monitor)
p
1
never sent.
Active monitoring isn’t going to work.
Department of Computer Science — University of San Francisco – p.20/