



Nonlinear Second Order Models
Duffing Pendulum
Mathematical Modeling
& Simulation
Docsity.com









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These lecture slides are delivered at The LNM Institute of Information Technology by Dr. Sham Thakur for subject of Mathematical Modeling and Simulation. Its main points are: Nonlinear, Second, Order, Models, Duffing, Pendulum, Driven, Damped, MATLAB, First, Case, Study
Typology: Slides
1 / 26

This page cannot be seen from the preview
Don't miss anything!
f ( x , y ) dt
dy g(x,y) dt
dx
g(x,y)
f(x,y)
dx / dt
dy / dt
dx
dy
Non-Linear Models
MATLAB program: Duffingx.m
% main program for duffing pendulum: % Equation : acc = -cv + ax - bx^3 + dcos(wt) % this equation is used in a separate m-file for function: duff.m % we get chaos and a strange attractor if the driving force d =1. % Poincare section is a complicated curve namely a fractal ....... close all clear clc global c a b d w c=0.1; a=1; b=0.25; w =2; % constant values % the driving force d =1.5 and a Poincar section is developed d=1.5; % amplitude of force time_period = 2pi/w del = time_period/100; h = del; tmax = 150000.0; nx = tmax ; nmax = tmax/del; t = 0:del:nx; % time array is formed.... %%%%% for solver; [t,y] = solver(odefun,tspan,y0,options) [t x]=ode45(@duf,t,[0 1]); % the model eq. is solved .... %%%%%% now plot graphs
MATLAB program: Duffingx.m
%%%%%% now plot graphs figure(1) plot(t(1:nx),x(1:nx,1),'r') axis tight title('time series') figure(2) plot(x(1:nx,2),x(1:nx,1),'b') axis tight title('phase space') figure(3) for i=200:100:nmax kk=(i-100)/100; x1(kk)=x(i,2); x2(kk)=x(i,1); end plot(x1(:),x2(:),'k.') axis tight title('Poincare section') %
% function program: duf.m % Forced Duffing Oscillator % function xdot=duf(t,x) global c a b d w xdot(1)=-cx(1) + a^2x(2)- bx(2)^3 + dcos(w*t); xdot(2)=x(1); xdot=xdot'; end
Separate file for function.
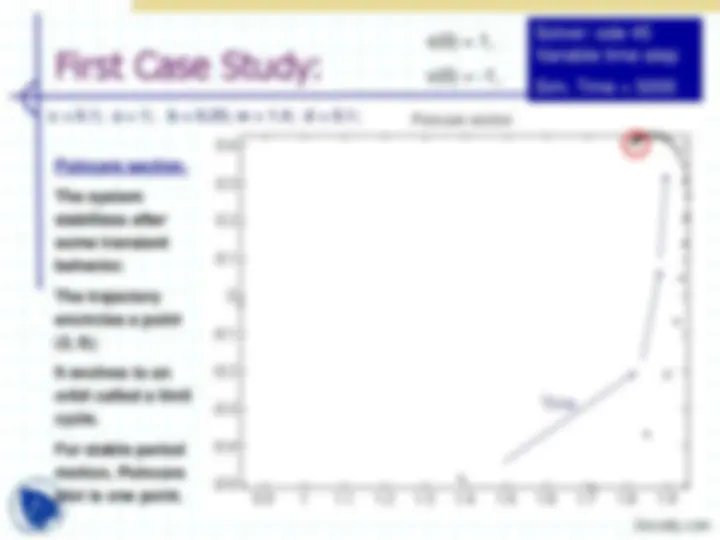
First Case Study:
The x(t) versus t. The system stabilizes after some transient behavior. The trajectory encircles a point (2, 0); It evolves to a period motion with fix amplitude and fixed period.
c = 0.1; a = 1; b = 0.25; w = 1.4; d = 0.1;
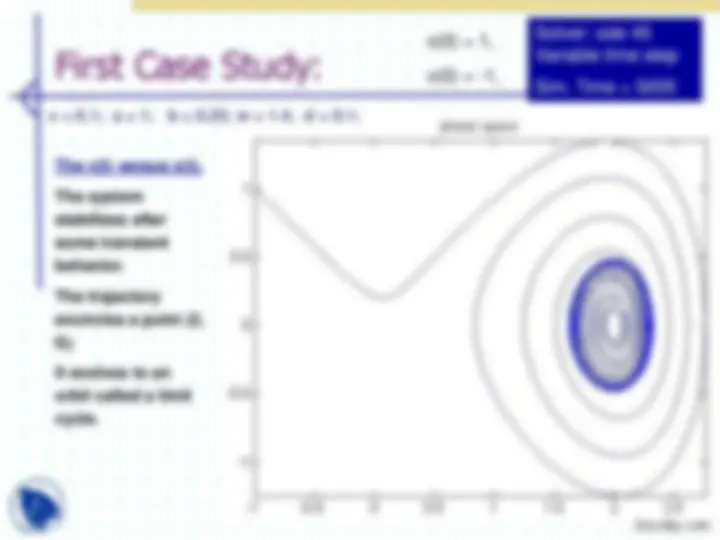
First Case Study:
The v(t) versus x(t). The system stabilizes after some transient behavior. The trajectory encircles a point (2, 0); It evolves to an orbit called a limit cycle.
c = 0.1; a = 1; b = 0.25; w = 1.4; d = 0.1;
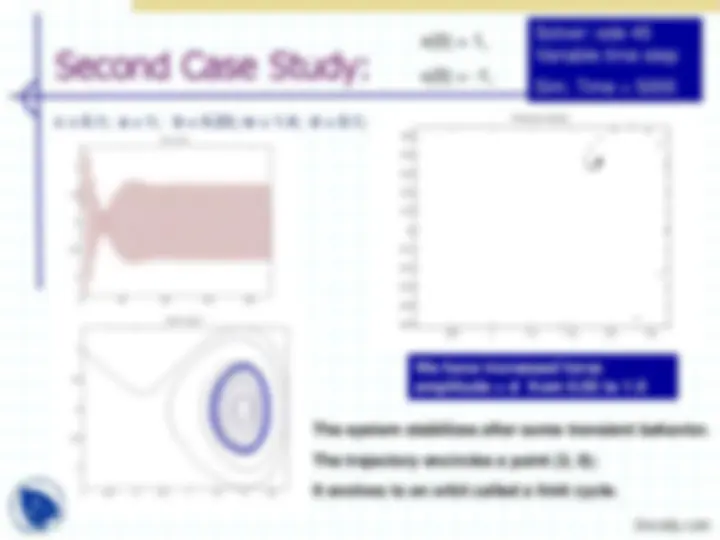
Second Case Study:
c = 0.1; a = 1; b = 0.25; w = 1.4; d = 0.1;
The system stabilizes after some transient behavior. The trajectory encircles a point (2, 0); It evolves to an orbit called a limit cycle.
We have increased force amplitude = d from 0.05 to 1.
Third Case Study:
The system again stabilizes after some transient behavior. However, trajectory encircles a new point (-2, 0); It evolves to an orbit called a limit cycle.
Here We have increased force amplitude = d from 0.1 to 2.
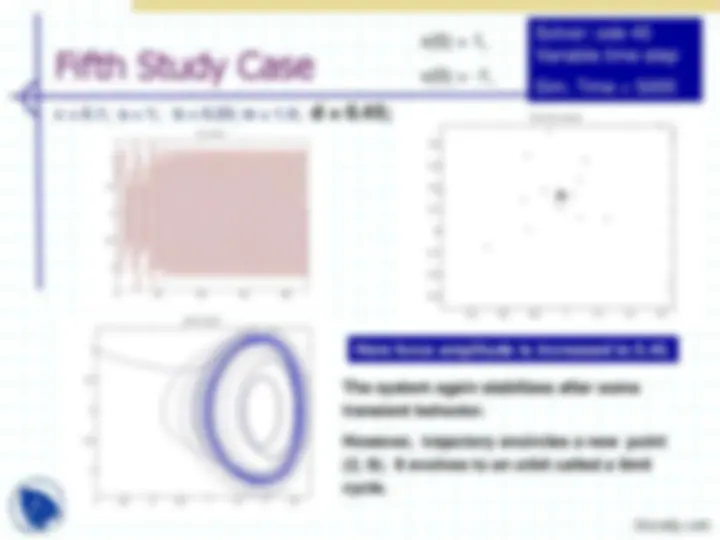
Fifth Study Case
The system again stabilizes after some transient behavior. However, trajectory encircles a new point (2, 0); It evolves to an orbit called a limit cycle.
Here force amplitude is increased to 0.45.
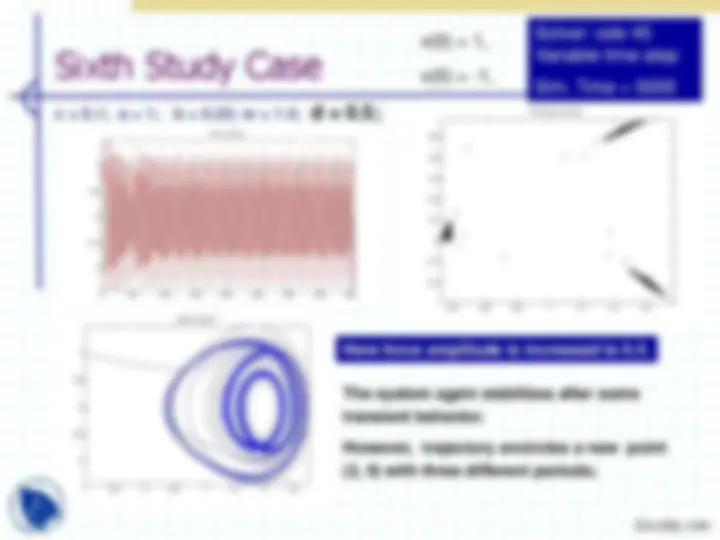
Sixth Study Case
The system again stabilizes after some transient behavior. However, trajectory encircles a new point (2, 0) with three different periods;
Here force amplitude is increased to 0.5.
Seventh Study Case
Here force amplitude is increased to 0.7. The system never stabilizes …. There is now chaos … The Poincare section is a beautiful picture.
Seventh Case
c = 0.1; a = 1; b =0.25; w =1.4;
Here force amplitude is increased to 0.7. The system never stabilizes ….
There is now chaos …
The Poincare section is a beautiful picture.
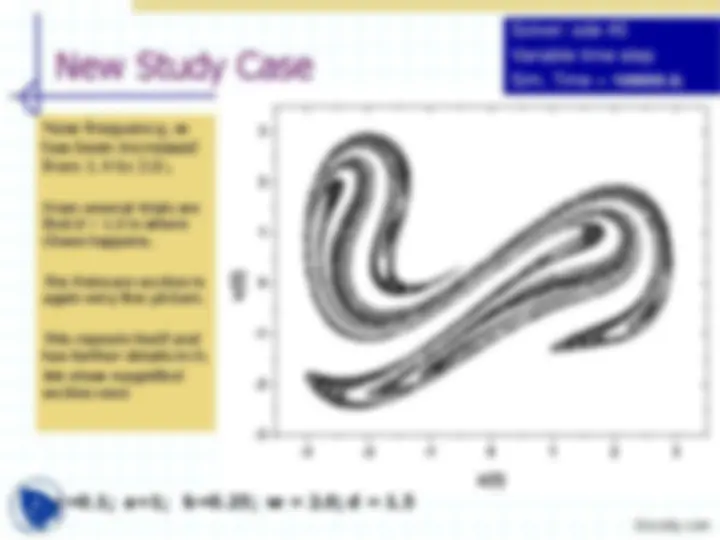
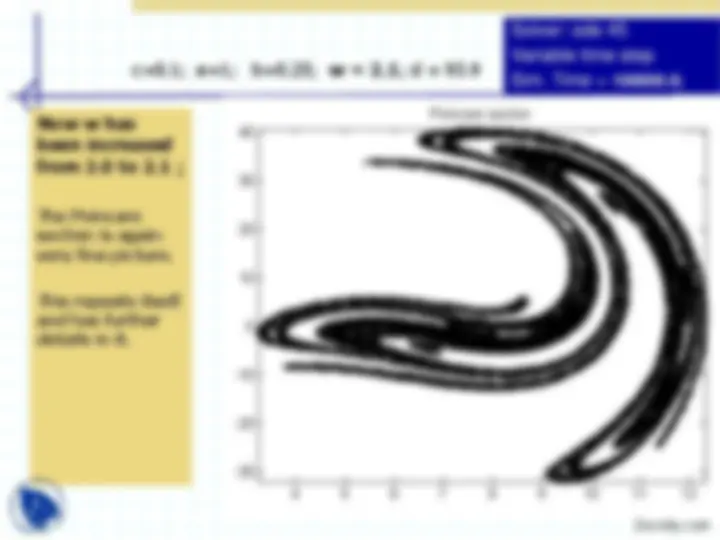
Now w has been increased from 1.4 to 2.0 ;
The Poincare section is again very fine picture.
This repeats itself and has further details in it. We show magnified section here and its shows the pattern repeating…
New Study Case Sim. Time = 100000.0;
Now w has been increased from 1.4 to 2.0 ;
The Poincare section is again very fine picture.
This repeats itself and has further details in it. We show magnified section here and its shows the pattern repeating…
New Study Case Sim. Time = 100000.0;