Download Dynamically Stable Legged Locomotion and more Exercises Vector Analysis in PDF only on Docsity!
Dynamically Stable Legged Locomotion
Progress Report: October 1982 - October 1983
Marc H. Raibert, H. Benjamin Brown, Jr., Michael Chepponis,
Eugene Hastings, Jeff Koechling, Karl N. Murphy,
Seshashayee S. Murthy, Anthony J. Stentz
Leg La bo rat0 ry
The Robotics Institute
and Department of Computer Science
Ca rnegie-Mellon University
Pittsburgh, PA. 15213
13 December 1983
This research was sponsored by a grant from the System Development Foundation. and by a contract From
the Defense Advanced Research Projects Agency (L>oD), Systems Sciences Ofice, ARPA Order No. 4148.
iv
V
Table of Contents
Abstract ........................................................................ iii 1 Introduction and Summary ..................................................... 1 1.1 3D Experiments ................................................................... 1 1.2 Planar Trotting and Bounding ....................................................... 2 1.3 A Running Machine with Four Legs .................................................. 3 1.4 Is Gait a Coupled Oscillation? ....................................................... 4 1.5 PathControl ...................................................................... 5 1.6 Legged Locomotion Vignettes ....................................................... 6 2 Experiments with a 30 One-Legged Hopping Machine .......................... 7 Marc H. Raiberk H. Benjamin Brown, Jr.. and Michael Chepponis
2.2.
2.4. 2.4. 2.4.3.
Abstract .......................................................................... 7 Introduction ...................................................................... 7 Background ....................................................................... 8 3D Hopping Machine .............................................................. 9 Control Algorithms ................................................................ 11 Forward Velocity ................................................................... 13 Body Attitude ..................................................................... 17 Hopping Height ................................................................... 18 Experimental Results ............................................................... 18 Discussion., ...................................................................... 24 Summary ......................................................................... 26 Appendix A: Physical Parameters of 3D One-Legged Machine............................ 28 Appendix B: Kinematics of 3D Machine .............................................. 29 3 Control of Trotting and Bounding for a Simple Planar Model .................... (^) 33 Karl N. Mutphy
3.4. 3.4. 3.4.
3.5. 3.5.
3.6. 3.6.
Abstract ...................! ...................................................... Introduction ...................................................................... Model............................................................................ Control...........................................................................
Velocity Control ................................................................... Attitude Control ................................................................... Results ........................................................................... Trotting .......................................................................... Bounding ......................................................................... Discussion ........................................................................ Control Strategies.................................................................. Failure of Hip Torque for Attitude Control ............................................ Conclusions.......................................................................
Vertical Control ... i ...............................................................
Appendix. Simulation Parameters...................................... :.............
- 7.4.1 Circle Feet vii
- 7.4.2 YawControl
- 7.5 Foot Placement for Leaping
- 7.6 Behavior During Stance
- 7.7 Running is Like Juggling
- 7.8 Do Locomotion and Manipulation Have a Common ground? - Bibliography i
V i i i
2
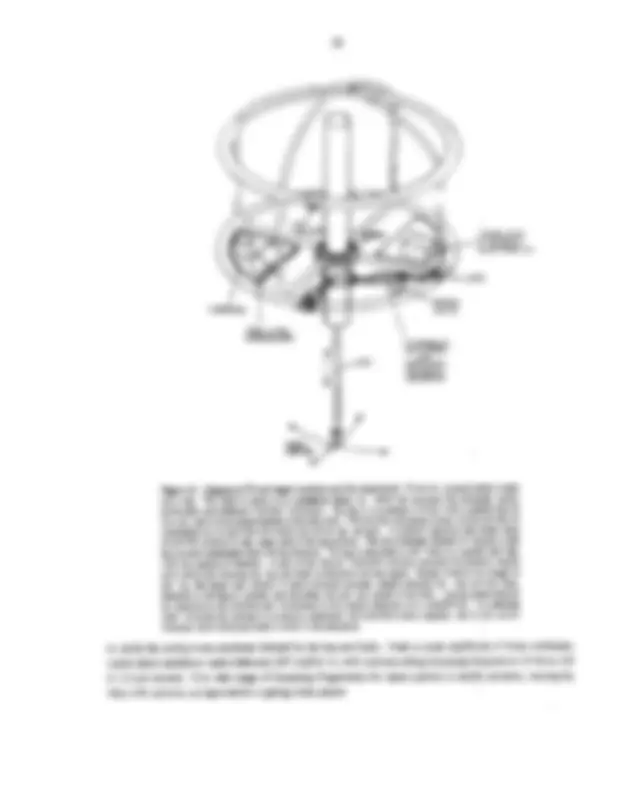
Figure 1-1: Photograph of 3D one-legged machine in mid stride. The machine is running from left to right Top recorded running speed was about 2 2 m/sec (4.8 mph).
1.2 Planar Trotting and Bounding
In order to learn about control of locomotion in dynamic systems with more than one leg. we devised a model
that looks very much like one lateral half of a quadruped. The model is planar with two springy less, one
attached to^ the body in the front, and the other attached in^ the^ rear.^ We^ have found through simulations of this model, that balance during uotting and bounding can be accomplished with mechanisms similar to those
used for control of the one-legged systsrns. One of our most important findings this pear is that this model
will run with a stable bounding gait, without active stabilization of the body pitch angle.
TIME (sed Figure 1-2 Planar two-leggedmodel running with a bounding gait Each leg of the model is controlled independently to regulate hopping height and forward velocity. The body rocks back and forth in a passively stabilized osdllation, (^) with very little up and down motion of the center of gravity. When running is initiated there is a random pattern of rocking, but it won stabilizes. TOP The cartoon shows behavior when running at about 4 m/sec MIDDLE: Attitude of body. BOTTOM: Altitude of body.
During m f f i n g the two legs move in unison and there is very little pitching motion of the body. The control
system that generates trotting:
- Uses the sum of the leg thrusts during stance to regulate desired hopping height.
- Uses the difference in leg thrusts to control attitude of the body.
- Uses hip torque during stance to control fornard velocity. 4. Uses the position of the feet at touch-down to balance the system.
In a bound the legs act alternately, with each support phase separated by a flight phase. The control system
that generates bounding is very similar to that used for trotting, with one exception: 'no action is taken
specifically to control the attitude of the body or its pitching motions. The body pitches back and forth in a passively stabilized motion. While we do not yet fblly understand the mechanism responsible for the stability
of this oscillation, it seems to hold for a wide range of model parameters and running speeds.
1.3 A Running Machine with Four Legs
While experimentation with one-legged systems has taught us a great deal about balance and dynamics in
locomotion with a minimum of unnecessary complication, we are eager to extend our experiments to the multi-legged case. The power of the one-legged results will receive the acid test when we attempt to
generalize them to the control of machines that run and balance on several legs.
1 ni TnT
Bounc i n g
Swaying
Figure 1-4: Gait as a coupled osdllation. ?he planar twdegged model has three modes of oscillation. bouncinG rocking, and swaying.
by the legs, and contour of the ground are each factors that should influence the manner in which the legs
oscillate, and the timing relationship between their oscillations. At the heart of this idea is the notion that the
gait is dominated by the mechanics of the legged system, rather than by the control. Four competing
hypotheses guide our thinking:
e The control system deternines the pattern and timing of each limb’s motion.
0 The control system switches From one mode to another when it is efficient to do so. 0 T h e control system adjusts mechanical parameters when increasing speed, with resulting changes
@Themechanical system switches oscillation modes as speed changes, with fixed mechanical
in the pattern of oscillation.
parameters.
To examine this question we use a planar model that has two springy legs attached to a rigid body. The model has three modes of oscillation: bouncing, rocking, and swaying, as shown in Fig. 1-4. Analysis and computer
simulations of the model show that the bouncing and the rocking modes are coupled. The ratio of the
stiffness of the hips to that of the legs determines the pattern of rocking and swaying. We have not yet shown
that this coupling represents gait-like behavior,
f J I I \
1 / (^) / i I^ I I^ I ,
F v r e 1-5 Simulated 3D onelegged machine running in axles. A constant lateral offset of the foot coupled with constant forward velodty, produces a constant radius of curvature.
1.5 Path Control
The ability to traverse an arbitrary path in the horizontal plane will be an important milestone for dynamic
legged systems, if they are to achieve maneuverability and to avoid obstacles in their paths. To follow an
arbitrary path it is necessary to control both the speed and direction of travel. We have not yet learned how to
follow an arbitrary path, but in this section we describe simple methods that permit a simulated 3D one-
legged system to generate paths of varying curvature and speed.
1.6 Legged Locomotion Vignettes
We have collected together ideas about legged locomotion, that have occurred to us over the past several years. Some of these ideas set the stage for work we plan to do in our laboratory. The sections on Locomotion
Algorithms for N Legs and Fool Placement for Leaping fall into this category. Other sections present ideas
that are not well formulated, and indeed, may turn out to be wrong. None of the ideas presented in this
chapter is backed by experimental data or careful analysis. The purpose of collecting these discussions here is
to provide an open repository for our developing thoughts where they can get some air, criticism, and perhaps
stimulate better ideas.
experiments was a planar device, that was constrained mechanically to move with just three degrees of
fiecdom. Usefil locomotion takes place in 3 dimensional space, where motion with six degrees of freedom is
possible. In this paper we present algorithms that control a legged system that balances as it hops and runs in
3D, and experimental data that characterize the performance. These experiments show that, in the context of a hopping machine with a single springy leg, the control problem need not be difficult at all. A very simple
set of algorithms is sufficient to control the machine as it hops in place, as it travels from point to point under
velocity or position control, and as it responds to external mechanical disturbances. The control algorithms
are direct generalizations of those used in 2D.
2.2.1 Background
Previous work on balance began with Cannon's control of inverted pendulums that rode on a small powered
truck (Higdon and Cannon, 1963). His experiments included balance of a single pendulum, two pendulums one atop the other, two pendulums side by side, and a long limber pendulum. Their technique was to control the tipping moments by manipulating the point of support with state feedback. Hemami and his co-workers (Golliday and Hemami, 1977; Hemami and Golliday, 1977; Hemami and Farnsworth, 1977; Ceranowicz, 1979; Hemami, 1980), Vukobratovic and his co-workers (Vukobratovic and Stcpaneko, 1973; Vukobratovic and Okhotsimskii, 1975), and others (Frank, 1970; Bessonov and Umnov, 1973; Bcletskii and Kirsanova,
1976) have studied the dynamic characteristics of a variety of multi-link legged models that walk in
simulation. In each case the models balance while maintaining continuous contact with the support surface.
Kato et al. (1981) have studied quasi-dynamic walking in the biped. In their experiments a 40 kg biped with
10 hydraulically driven degrees of freedom, temporarily destabilizes itself in order to transfer support from
one large foot to the other. It uses a pre-recorded sequence of motions to do this. Miura arid Shimoyama
(1980) have built a number of small eIectrically powered walking bipeds that balance using tabular control
schemes. Their most advanced device, called the still biped, walks on two small feet while balancing in 3D. It
has three actuated degrees of freedom that permit each leg to move fore and aft, to move sideways, and to lift
slightly off the floor. It walks with a pronounced shuffling gait
Systems with a ballistic phase have also been studied. Seifert (1967) explored the idea of using a large
pogostick for transportation on the moon, where low gravity would permit very long hops. (^) He proposed using a moment exchange gyroscope to reorient the body in flight. Matsuoka (1979) analyzed 2D hopping in humans with a one-legged model. He derived a time-optimal state feedback controller that stabilized his
model, assuming that the leg could be treated as massless, and that the stance period could be of very short
duration. Matsuoka (1980) also implemented a physical planar one-legged hopping machine that operated in
a very low-g environmentby lying on a table inclined 10 ' from the horizontal.
Originally motivated by the conceptual similarity between a pogostick and a leg, Raibert and his co-workers studied planar systems that hop and balance on one springy leg (Raibert, 1984; Raibert and Wimberly, 1984; Raibert and Brown, 1984). R e y found that for a system constrained to operate in 2D, control could be
decomposed into three separate and very simple parts: one to control forward running velocity, one to
maintain the body in an erect posture, and one to regulate hopping height. These three parts af the control system were each synchronized to the ongoing activity of the hopping machine. This decomposition of the balance problem resulted in a particularly simple control design, and it provided a framework within which one can think about more complicated problems in locomotion.
In this paper we extend these results for a 2D system to a system that balances in 3D. The main result is that
very simple algorithms are adequate to control the locomotion of a one-legged machine that hops and runs in
3D. The 3 D control algorithms are direct extensions of the 2D algorithms, relying on the same three-part decomposition. The sections.that follow describe the physical hopping machine that was used for experiments, they review the 2 D control algorithms A d describe their generalization to 3D, and they present
experimental data that illustrate the system’s ability to balance and run under a variety of conditions.
2.3 3 D Hopping Machine
The hopping machine shown in Fig. 2-1 was designed for experiments on balance in three dimensions. The
main parts are a springy leg and a body, connected by a gimbal-type hip. Actuators control the orientation of the leg with respect to the body, and the axial thrust delivered by the leg. Sensors provide state information
from the hip, leg, and body to a control computer located nearby in the laboratory.
The body consists of a lightweight platform and roll cage, on which are mounted sensors, valves, actuators,
and interface electronics. The ratio of moment of inertia of the body to that of the leg is about 6. 5 :l. This
relatively high ratio ensures that movement of the leg during flight does not severely disturb the attitude of
the body. The center of m a s of the body is located very close to the hip. so the only moments acting on the
body are those generated by the hip actuators. A pair of free gyroscopes mounted on the body provide
measurements of the roll, pitch, and yaw angles of the body with respect to fixed space. The roll cage protects
the hopping machine when it falls over, and also provides convenient handles during experiments.
The leg is a double acting air cylinder. The arrangement of pneumatic cylinder, pressure regulator, and check
valve forms an air spring that absorbs energy when the leg shortens under external load and supplies energy
when the leg lengthens. It is storage and recovery of energy in this air spring that transfers the lunetic energy
from one hop to the next hop, thereby reducing the cost of continuous hopping. The upper chamber of the
pneumatic cylinder that forms the leg actuator, is connected to a pressure regulator that maintains its
minimum pressure. This regulator was set to values between 40 and 75 psi for the present set of experiments.
A check valve permits the pressure to increase when the leg is compressed, without forcing air back through
the system.
The hopping motion is produced by the flow of compressed air to and from the lower chamber of the leg
actuator. A pair of 2-way solenoid valves permits this chamber to be pressurized to 80 psi or exhausted.
When it is pressurized it causes the piston to move upward and the leg to shorten, and when it is exhausted it
causes the piston to move downward and the leg to lengthen. The timing of pressure and exhaust are chosen
A rubber cushion is attached to the lower end of the leg actuator rod to form a foot. The area of the foot that
contacts the ground is only about 1 cm2, providing a good approximation to a point support. The coefficient
of friction between the foot and the floor in our laboratory is about 0.6. The^ foot has a built-in switch that
tells thc control computer when there is contact with the ground. The uppcr end of the actuator rod cames a wiper that forms the moving clement of a linear potentiometer used to mcasure the length of the leg.
The leg and body are connected by a gimbal joint that forms a hip. A pair of linear hydraulic actuators
controls the angles between the body and the leg. These hip actuators use only low pressure seals, and a leaky
piston to provide very low static friction. Each hip actuator has a pressure control servo valve, a linear
potentiometer, and a linear tachometer. The control computer servos the length of these actuators, and thercfore the angles between leg and body, with a pair of linear servos:
fi(t) = Kp(wi-wi> + Kv(Wi) (2.1)
where fi (t) w ., w.
Ki, Kv
is the force generated by the ith actuator,
are position and velocity gains.
I. 6^ wi are the length, the desired length, and velocity of the ith actuator,
Using this servo, a full sweep of the leg takes approximately 70 msec. This arrangement of body, leg, hip, and
actuators provides a means to control the position of the foot and the hip torque needed to balance the system
during locomotion.
Data from the sensors mounted on the hopping machine are digitized and transmitted to the control
computer over a digital bus. These sensors include the gyroscopes, the hip actuator potentiometers and tachometers, the leg length potentiometer, the foot switch, and the leg pressure sensors. These sensory data
are used not only to control the machine, but also to record and analyze its behavior. The umbilical cable that
carries the digital communication bus also carries hydraulic power for the hip actuators, compressed air that drives the^ hopping motion, and DC power for sensors and electronics.
To make the machine balance while traveling from place to place, the control algorithms position the foot during flight and correct the body attitude during stance. During flight the control computer chooses a
forward position for the foot appropriate to the machine’s rate of travel. During stance the control computer
generates torques at the hip to maintain an upright body posture. The resulting control system produces
running at rates of up to 2.2 m/sec (4.8 mph) with suides of up to 0.79 m. General operation of the machine is
shown in Fig. 2-2 by a sequence of photographs taken in one stride,
2.4 Control Algorithms
In this section we describe the algorithms examined for hopping and balance in the 3D machine. Since these
algorithms were formulated by generalizing from the 2D machine, we also review the 2D algorithms.
Figure 2.2: Sequence of photographs showing one complete stride of the 3D hopping machine running from left to right Grid on floor indicates 0.5 m intervals. Running speed is about 1.75 m/sec, with stride length 0.63 m. and stride period 0.380 sec. Adjacent frames separated by 76 msec.
Conceptually, the 2D and 3D algorithms are very similar. The basic approach is to treat the system like an
inverted pendulum, and to decompose the control into independent parts. As in 2D, the 3D algorithms
decompose easily into three parts, one part each for control of forward running velocity, attitude of the body,
and hopping height. The system controls forward running velocity by positioning the foot with respect to the
projection of the center of gravity. This is done during every flight phase, when thc foot is not touching the
ground. The system controls the attitude of the body by torquing the hip during stance when the foot is held in place by friction. The system adjusts the hopping height by regulating the amount of thrust delivered by the leg on each hop. These three parts of the control system are largely independent, with their
synchronization coming from the ongoing activity of the hopping machine. It is this indepcndcnce of action
that makes the control system simple.
The rcmainder of this section reviews each part of the control algorithm used in 2D, and dcscribcs the
corresponding extension to 3D.