Download Electrical Machines: DC Generators and Transformers - Lecture Notes and more Lecture notes Electric Machines in PDF only on Docsity!
LECTURE NOTES
On
Electrical Machine 1
Name of the Department- Electrical Engineering
SUBJECT CODE-
NAME OF THE SUBJECT- ELECTRICAL MACHINE 1 (PART 1)
SEMESTER- 3 RD
BRANCH- EE&EEE
PART1- MODULE1+ MODULE 2
DETAIL SYLLABUS
Veer Surendra Sai University of Technology, Orissa, Burla, India Department of Electrical Engineering, Syllabus of Bachelor of Technology in Electrical & Electronics Engineering, 2010
(3RD^ SEMESTER) ELECTRICAL MACHINES-I (3-1-0) MODULE-I (10 HOURS) Electromechanical Energy conversion, forces and torque in magnetic field systems – energy balance, energy and force in a singly excited magnetic field system, determination of magnetic force , coenergy, multi excited magnetic field systems. DC Generators – Principle of operation, Action of commutator, constructional features, armature windings, lap and wave windings, simplex and multiplex windings, use of laminated armature, E. M.F. Equation, Methods of Excitation: separately excited and self excited generators, build up of E.M.F., critical field resistance and critical speed , causes for failure to self excite and remedial measures, Armature reaction: Cross magnetizing and demagnetizing AT/pole, compensating winding, commutation, reactance voltage, methods of improving commutation Load characteristics of shunt, series and compound generators, parallel operation of DC generators, use of equalizer bar and cross connection of field windings, load sharing.
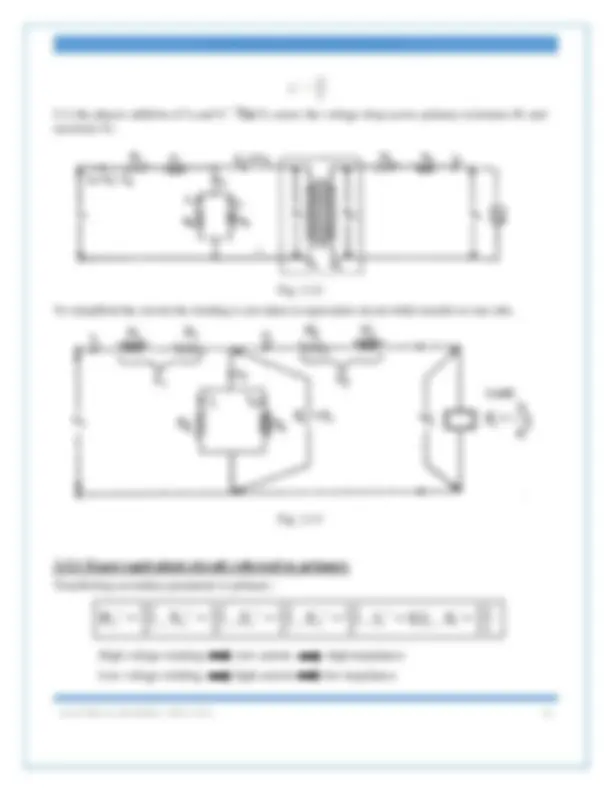
MODULE-II (10 HOURS) Transformers: Single phase transformer, Constructional details, Core, windings, Insulation, principle of operation, emf equation, magnetising current and core losses, no load and on load operation, Phasor diagram, equivalent circuit, losses and efficiency, condition for maximum efficiency, voltage regulation, approximate expression for voltage regulation, open circuit and short circuit tests, Sumpner’s test, Inrush of switching currents, harmonics in single phase transformers, magnetizing current wave form, Parallel operation of transformers.
MODULE-III (10 HOURS) DC Motors: Principle of operation, Back E.M.F., Torque equation, characteristics and application of shunt, series and compound motors, Armature reaction and commutation, Starting of DC motor, Principle of operation of 3 point and 4 point starters, drum controller, Constant & Variable losses, calculation of efficiency, condition for maximum efficiency. Speed control of DC Motors: Armature voltage and field flux control methods, Ward Leonard method.
Disclaimer
This document does not claim any originality and cannot be used as a substitute for prescribed textbooks. The information presented here is merely a collection by the committee members for their respective teaching assignments. Various sources as mentioned at the end of the document as well as freely available material from internet were consulted for preparing this document. The ownership of the information lies with the respective authors or institutions. Further, this document is not intended to be used for commercial purpose and the committee members are not accountable for any issues, legal, or otherwise, arising out of this document. The committee members make no representations or warranties with respect to the accuracy or completeness of the contents of this document and specially disclaim any implied warranties of merchantability or fitness for a particular purpose. The committee members shall not be liable for any loss or profit or any other commercial damages, including but not limited to special, incidental, consequential, or other damages.
1.1 Electromechanical-Energy- Conversion Principles The electromechanical-energy-conversion process takes place through the medium of the electric or magnetic field of the conversion device of which the structures depend on their respective functions.
Transducers: microphone, pickup, sensor, loudspeaker
Force producing devices: solenoid, relay, and electromagnet
Continuous energy conversion equipment: motor, generator
1.2 Forces and Torques in Magnetic Field Systems The Lorentz Force Law gives the force F on a particle of charge q in the presence of electric and magnetic fields.
F = q ( E + v × B ) Where, F : newtons, q : coulombs, E : volts/meter, B : telsas, v : meters/second
In a pure electric-field system,
F = qE
In pure magnetic-field systems, F = q ( v × B )
Fig 1.1 Right-hand rule for F = q ( v × B )
For situations where large numbers of charged particles are in motion,
Fv = ρ ( E + v × B ) J = ρv
Fv = J × B ρ (charge density): coulombs/m^3 , Fv (force density): newtons/m^3 , J = ρv (current density): amperes/m^2.
Most electromechanical-energy-conversion devices contain magnetic material.
Forces act directly on the magnetic material of these devices which are constructed of rigid, non- deforming structures. The performance of these devices is typically determined by the net force, or torque, acting on the moving component. It is rarely necessary to calculate the details of the internal force distribution. Just as a compass needle tries to align with the earth’s magnetic field, the two sets of fields associated with the rotor and the stator of rotating machinery attempt to align, and torque is associated with their displacement from alignment. o In a motor, the stator magnetic field rotates ahead of that of the rotor, pulling on it and performing work. o For a generator, the rotor does the work on the stator.
The Energy Method
> Based on the principle of conservation of energy: energy is neither created nor destroyed; it is
merely changed in form.
> Fig. 1.2 shows a magnetic-field-based electromechanical-energy-conversion device.
- A lossless magnetic-energy-storage system with two terminals
- The electric terminal has two terminal variables: e (voltage), i (current).
- The mechanical terminal has two terminal variables: f fld (force), x (position)
- The loss mechanism is separated from the energy-storage mechanism.
- Electrical losses: ohmic losses...
- Mechanical losses: friction, windage...
The ability to identify a lossless-energy-storage system is the essence of the energy method.
This is done mathematically as part of the modeling process.
For the lossless magnetic-energy-storage system of Fig. 1.2 can be rearranged and gives
dW elec dW mech dW fld where
dW elec id = differential electric energy input
dW mech f fld dx = differential mechanical energy output dW fld = differential change in magnetic stored energy
Here e is the voltage induced in the electric terminals by the changing magnetic stored energy. It is
through this reaction voltage that the external electric circuit supplies power to the coupling magnetic field and hence to the mechanical output terminals.
dW elec ei dt
The basic energy-conversion process is one involving the coupling field and its action and reaction
on the electric and mechanical systems.
Combining above two equation – dW elec (^) ei dt dW mech (^) dW fld
1.4 Energy in Singly-Excited Magnetic Field Systems In energy-conversion systems the magnetic circuits have air gaps between the stationary and moving members in which considerable energy is stored in the magnetic field.
This field acts as the energy-conversion medium, and its energy is the reservoir between the
electric and mechanical system.
Fig. 1.4 shows an electromagnetic relay schematically. The predominant energy storage occurs in the air gap, and the properties of the magnetic circuit are determined by the dimensions of the air gap.
Fig.1.4 Schematic of an electromagnetic relay
mech fld fld fld
L x i ( ) dW f dx dW id f dx
W fld is uniquely specified by the values of and x. Therefore, and x are referred to as state variables.
Since the magnetic energy storage is lossless, it is conservative system. W fld is the same regardless of how
and x are brought to their final values. Fig 1.5 shows where tow separate the paths.
Fig. 1.5 Integration paths for W fld
On path 2a, d and f fld =0. Thus df fld =0 on path 2a. On path 2b, dx = 0. Therefore the following equation
can be written
From the above equation co-energy W fld^ '^ ( , i x )can be seen to be a state function of the two independent
variables i and x.
For a system with a rotating mechanical displacement,
If the system is magnetically linear,
In field-theory terms, for soft magnetic materials
For permanent-magnet (hard) materials
For a magnetically-linear system, the energy and co-energy (densities) are numerically equal:
For a nonlinear system in which and i or B and H are not linearly proportional, the two functions
are not even numerically equal.
Fig.1.6 Graphical interpretation of energy and co-energy in a singly-excited system
1.7 Multiply-Excited Magnetic Field Systems Many electromechanical devices have multiple electrical terminals.
Measurement systems: torque proportional to two electric signals; power as the product of voltage
and current.
Energy conversion devices: multiply-excited magnetic field system.
A simple system with two electrical terminals and one mechanical terminal:
The energy for this linear system is
Co-energy function for a system with two windings can be defined as
For a linear system
Note that the co-energy function is a relatively simple function of displacement. The use of a co-energy function of the terminal currents simplifies the determination of torque or force.
Systems with more than two electrical terminals are handled in analogous fashion.
DC Generators
1.8 Principle of operation of DC Generator A D.C generator as shown in figure below the armature be driven by a prime mover in the clock wise direction and the stator field is excited to produce the field poles as shown. There will be induced voltage in each armature conductor. The direction of the induced voltage can be determined by applying Fleming's right hand rule. All the conductors under the influence of North Pole will have directed induced voltage, while the conductors under the influence of South Pole will have induced voltage in them. For a loaded generator the direction of the armature current will be same as that of the induced voltages. Thus and also represent the direction of the currents in the conductors. We know, a current carrying conductor placed in a magnetic field experiences force, the direction of which can be obtained by applying Fleming's left hand rule. Applying this rule to the armature conductors in fig 1.9, the rotor experiences a torque ( Te ) in the counter clockwise direction (i.e., opposite to the direction of rotation) known as back torque. For steady speed operation back torque is equal to the machines input torque ( Tpm ) i.e. the torque supplied by prime mover.
Fig. 1.9 Action of DC generator
1.9 Action of Commutator In DC machines the current in each wire of the armature is actually alternating, and hence a device is required to convert the alternating current generated in the DC generator by electromagnetic induction into direct current, or at the armature of a DC motor to convert the input direct current into alternating
1.10 Constructional Features The stator of the dc machine has poles, which are excited by dc current to produce magnetic fields. In the neutral zone, in the middle between the poles, commutating poles or interpoles are placed to reduce sparking of the commutator due to armature reaction. The commutating poles are supplied by dc current. Compensating windings are mounted on the main poles. Field poles are mounted on an iron core that provides a closed magnetic circuit. The motor housing supports the iron core, the brushes and the bearings. The rotor has a ring-shaped laminated iron core with slots. Coils with several turns are placed in the slots. The distance between the two legs of the coil is about 180 electric degrees for full pitch. The coils are connected in series through the commutator segments. The ends of each coil are connected to a commutator segment.
Fig. 1.12 Cross sectional view of DC Machine
Fig. 1.13 Armature of DC Machine
1.11 Armature Winding DC machines armature consists of armature conductors. The conductors distributed in slots provided on the periphery of the armature is called armature winding. Depending on the way in which the coils are interconnected at the commutator end of the armature, the windings can be classified as lap and wave windings. Further they can be classified as simplex and multiplex.
1.11.1 Coil Span/Coil Pitch: It represents the span of the coil. For full pitched winding, the span is 180^0 electrical or number of slots per pole. Coil pitch can be represented in terms of electrical degrees, slots or conductor. A full pitched coil leads to maximum voltage per coil.
1.11.2 Back Pitch (Yb) : It is the distance measured in between the two coil sides of the same coil at the back end of the armature, the commutator end being the front end of armature. It can be represented in terms of number of slots or coil sides. Back pitch also represents the span of coil.
1.11.3 Front Pitch ( Yf ): The distance between the two coil sides of two different coils connected in series at the front end of the armature is called front pitch.
1.12 Lap Winding Lap winding is suitable for low voltage high current machines because of more number of parallel paths. The number of parallel path in lap winding is equal to number of poles.
A=P Equalizing rings are connected in lap winding.