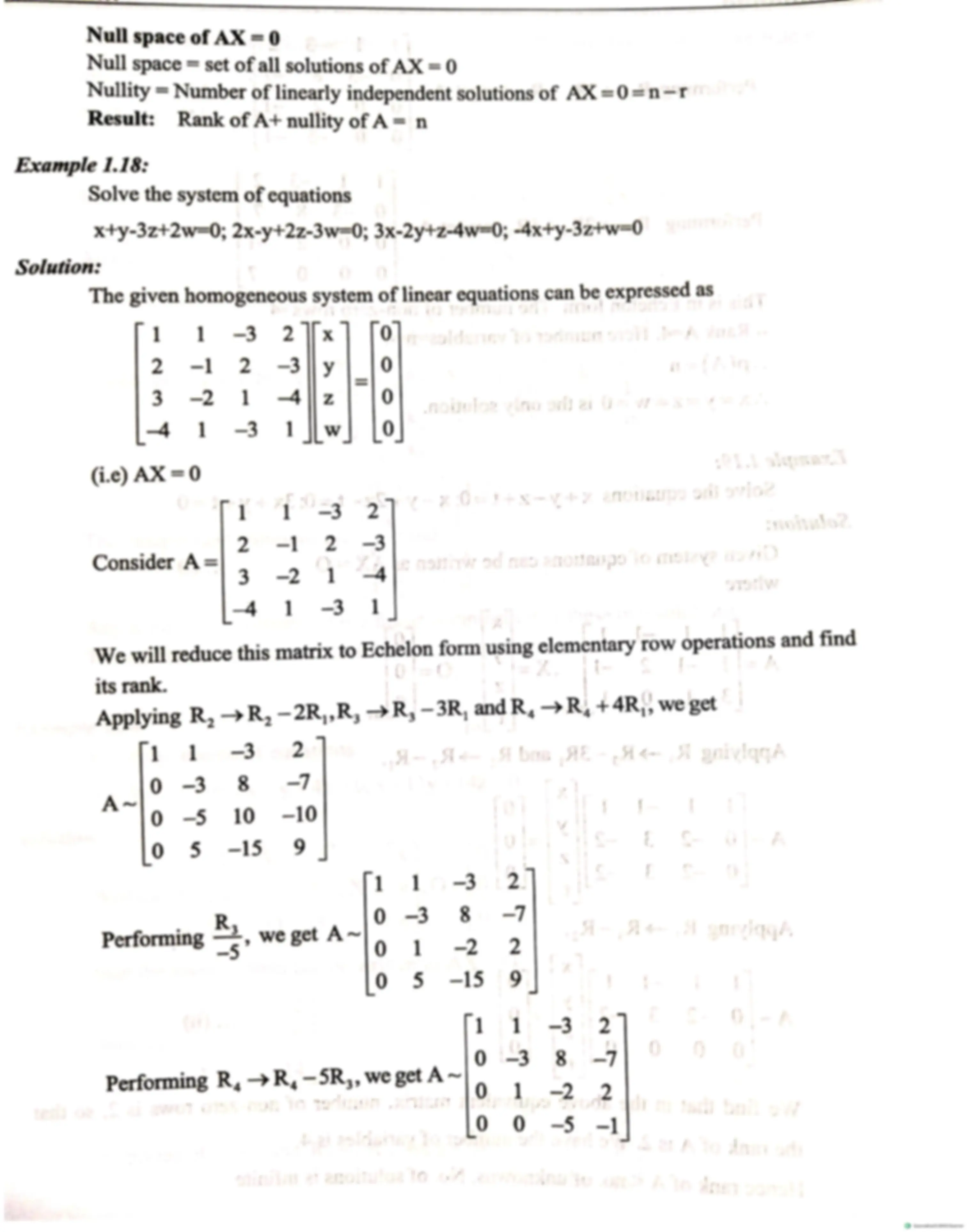
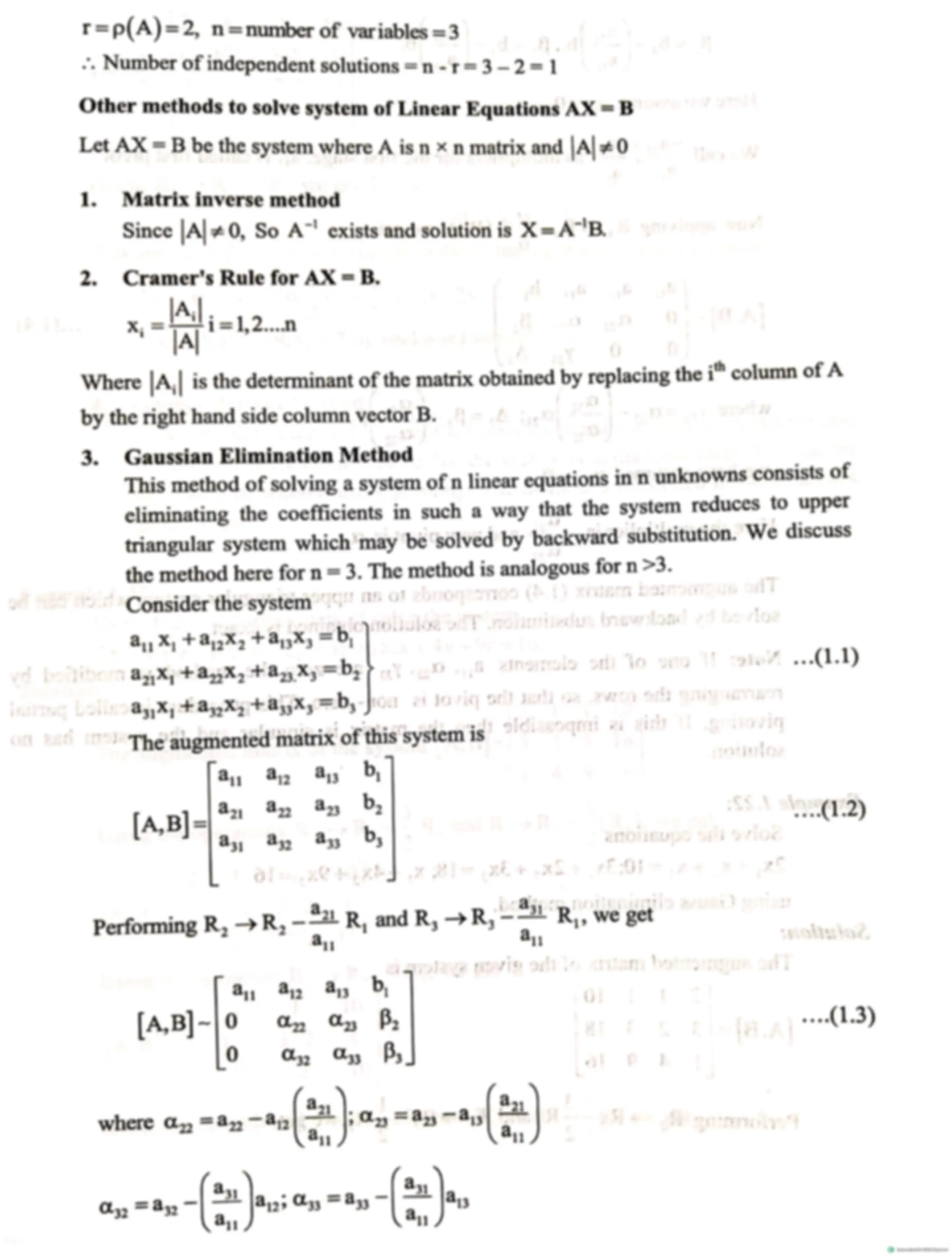
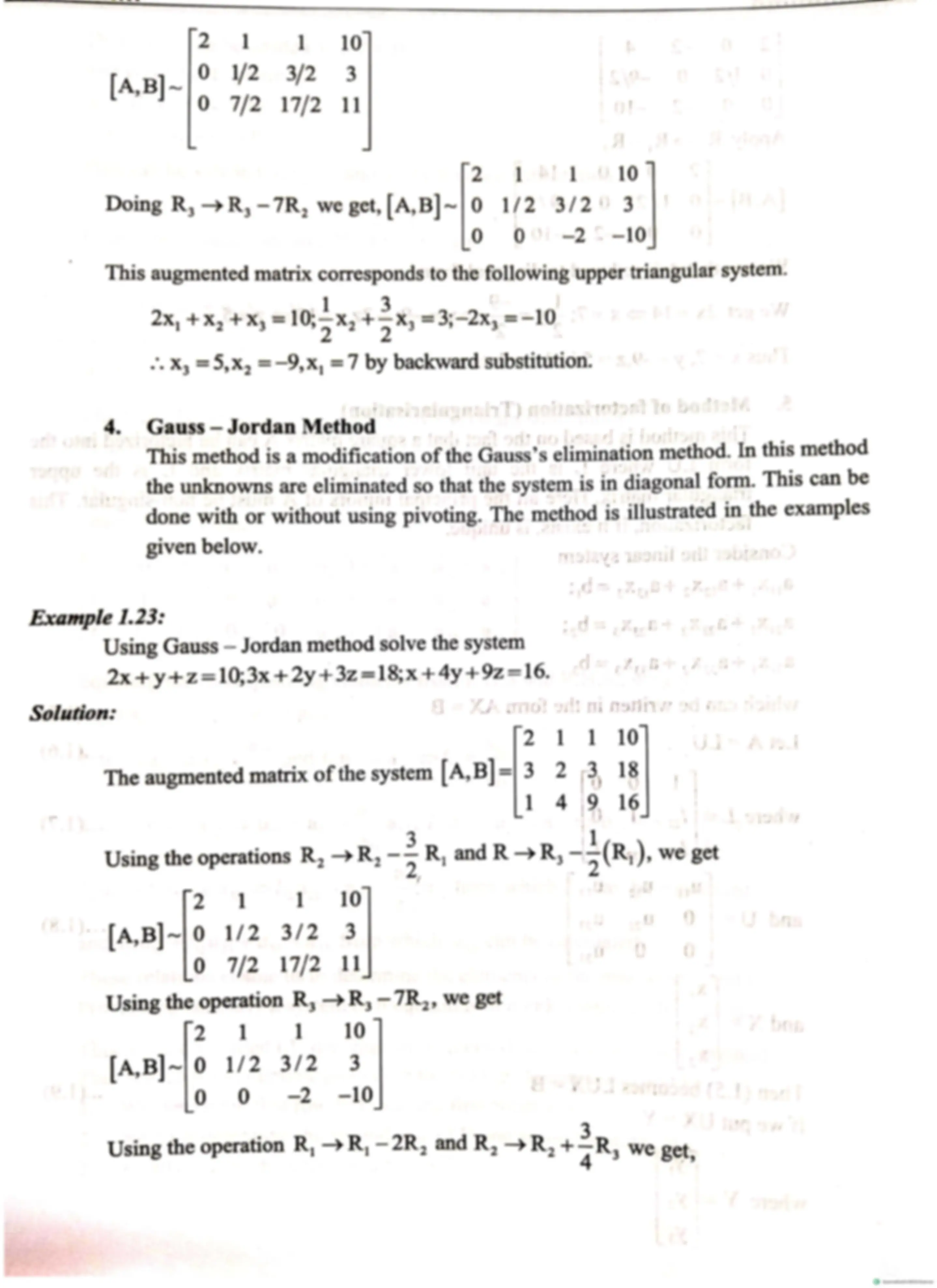
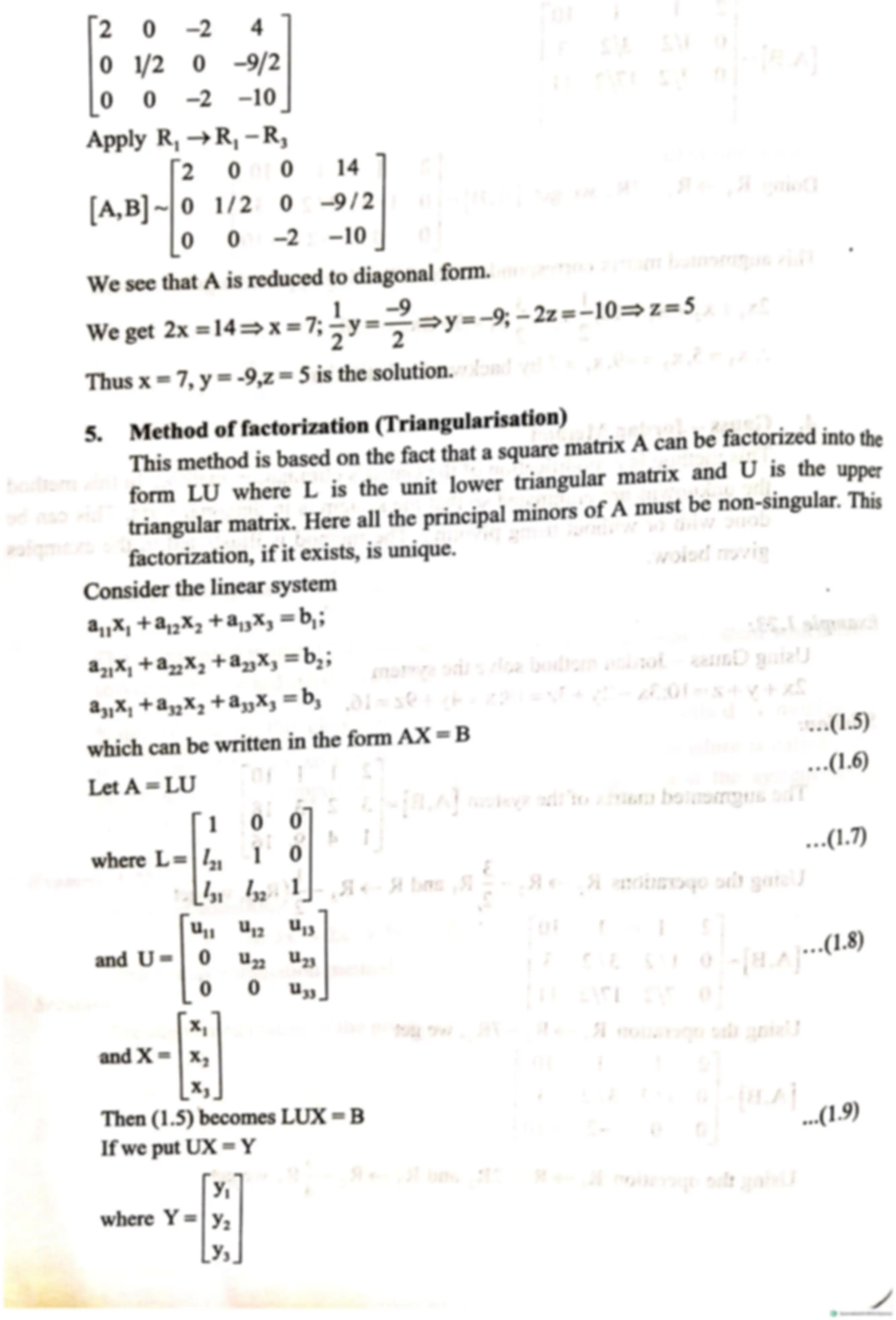
Partial preview of the text
Download Engineering Mathematics and more Study notes Engineering Mathematics in PDF only on Docsity!
1.1 BASICS — 1. Matrix: A rectangular array (arrangement) of numbers real or complex is called a Matrix. The horizontal lines of numbers are called rows and the vertical lines of numbers are called columns. The numbers in a matrix are called elements or Entries. 123.0 5 8.2 7|, 2. If A is a matrix of m-rows and n-columns then it is denoted by A= En mxn where 1 j —2 3 2 Ex.| 0 4 7 0 0 -6 ig said to be a lower nxn 12. Lower Triangular Matrix: A square matrix A= a, | triangular matrix if a; =0 whenever i 0 0] Fx.|/0 5 0 00 5] 1S. Identity. (unit), Matrix: In a square), matrix A= En Qaf a,=1, for 1=j,a.. = (i) A, B are of same size and Gi) The corresponding elements in A and B are'equal: Gi) A+(B+C)= (A+B)+ C( Associative) (iil) 0+ A=A+0=A (‘0 is the Additive Identity) (iv) A+(-A)= (—A) + A=0 (—Ais the Additive Inverse of A) (v) K(A+B)=KA+KB = © 22. 23. 24. 25. 26. 27. » 28. 29. 30. 31. Symmetric Matrix: A square matrix A is said to be a symmetric matrix if AT=A -l1 2 +4 Ex.| 2 0 3 4 3 -5 3x3 Skew Symmetric Matrix: A square matrix A is said to be a Skew Symmetric matrix if AT =—A_ | 0 2 6 Ex.|—2 0 4 -—§6 —-4 0 ays Note: Every Principal diagonal element of a skew symmetric matrix is 7ero, Every square matrix can be uniquely expressed as a sum of a symmetric matrix and a skew symmetric matrix. ... | T T . T A-A AtA ., If A is a square matrix then ja hy 3 — where 5 IS a AAT. aaaee symmetric matrix and 5 -1s skew-symmetric matrix _@) All positive integral powers of symmetric matrix is symmetric. (ii) Odd positive integral power of skew symmetric matrix is skew- symmetric. (iii) Even positive integral powers of skew-symmetric matrix is‘symmetric: Idempotent Matrix: A square matrix A is called idempotent if A* =A Involutory Matrix: A square matrix A is called an involutory if A* =I Nilpotent Matrix: A square matrix A is called nilpotent matrix if there exists a +ve integer n such that A" = o. The least ‘positive integral value is called the index of the nilpotent matrix A. Orthogonal Matrix: If AA’ =A" A=I then A is called orthogonal matrix. Conjugate of a Matrix: The matrix obtained frean a ao i ; Matrix A its elements by the corresponding conjugate complex abtiiedil ae nating the conjugate of A and denoted by A The transpose of the conjugate of a matri ‘is call Jueate of a matrix iF called transposed conjugate of A and it is denoted by A° or A*. i.e., A® = (A) or( 4] ix! m 32. Skew Hermitian Matrix: A square matrix if A’ =—A. , | | Note: The diagonal elements of skew hermitian matrix are pure imaginary (the ote: number zero 1S also considered) 33. Unitary Matrix: A matrix A 1s said to be unitary if A°A=AA° =] (vii) (A-B)(A? + AB+B’)=A’ -B 35. If AB = 0 then either A or B need not be equal to 0.» : 36... If AB =.AC then B need not:be.equal to C even if A#O.... 1.1.1 Determinants 1. The determinant of a square matrix MS ‘is the unique number ) MBO) 9.00 A)) bit a,b, _ &b »a,b,); It Iti is s denoted by ‘ a, 2 2. Minor: If a, is an element which is in i" row and j" column of a square matrix A, then the ident of the matrix: obtained by deleting the i row and j” column of A is called minor of aj. It is denoted by Mj. } i (14 ay ay | lf A= ao) Ao. a3 ax, a, 4,, 7 | 1 i then M,, = Minor of a,, = (21; ai"23 =(a ai! 21433 23,4; ) G3, A, matrix A then the product of (— 18 and. M; is called cofactor of 4;;. denoted by Aj. AL, The sum of the products of the elements of any row (column) of a square matrix with the. cofactors of the corresponding elements of any other row (column) 1s Zero. 4b ¢ A=la, b, c, a, b, c, => a,A,+b,B, +¢,C, =0 a,A; +b,B, +c,C, =0 a,A, +b,B, +¢,C, =0 a,A,+b,B, +c,C, =0 a,A,+b,B, +c,C, =0 a,A,+b,B,+¢,C, =0 12. If the elements of a square matrix are Polynomials in x and two rows (columns) become identical when x = a then x — a is a factor of its determinant. If three rows are identical then (x. a) is a factor of its determinant. 13. Ifa matrix has zero-row or zero-column then the determinant of A iS zero 14. The determinant of a upper triangular, lower triangular matrix, diagonal matrix is the product of the elements in the principal diagonal of the matrix. 15. det(AB)=(det A)(det B) =det (BA) 16. Ifdet(AB) =0 then either det A=0 or detB=0 17. The determinant of a skew symmetric matrix of odd order is Zero. 18. The determinant of a unit matrix is ‘1’ 19. A square matrix A is saidtobea (i) Singular matrix if |A| =0 (ii) non -singular matrix if [AJ #0 20. det (kA)=k".det A, where n =order of square matrix A. Remember: a bc 1. boca =-(a° +b>+e —3abc) c a b a h g 2. {h b f|=abc+2fgh —af? — bg? —ch? g f c la a’*} {fl a be 3. [fl b b’=/1 b cal=(a—b)(b—-c)(c—a) 1 c c*] {1 c abl - la al il a? be 4. jl b b*}=|1 b* ca =(a+b+c)(a—b)(b-c)(c-4) lc c} fl c? ab 2 1 a* al la a? be s. |i b? b'l=|b b? cal=(ab+bc+ca)(a—b)(b-c)(c-a) 2 1 c oc} le c*>-ab a b ec 6(i). a’ b* c*|=(a—b)(b—c)(c—a)abe a b oc 6(ii). |a bc =(a’ +b? +c? —ab—be—ca)(a—b)(b ~c)(c—a) a* b* c l+a b Cc 7. a 1+b cc /=l+at+bte a. b -l+c l¢a 1 1 at SOA 8. ] 1+b ] =(sbe)(1424 244) | a b ec l 1 l+c l+a’> ab ac 9. ab 1+b’- be =l+a?4+b?4¢’ ac be l+c?} n? (n+ 1) (n+2) 10. |(n+1) (n+2) (n+3)'}=-8— : (n +2) (n+ 3) (n+ 4)’ ; : $5. hich ox Seesitaeaa : c df OC SG aE tees cE sce ee Mee < eit eo hues Wek Ab , a ri ao ee re Ye a a . 7. IfA invertible > (A7 ) = A. 8 Iflisaunit matrix >I =1 9. IfA and B are two invertible matrices of same order then AB is also invertible — =(AB) =B'A". : : = itr 11. If A is an invertible matrix then:A! is also Invertible and (A™) = (A ') , AdjA det A 12. If Ais anon singular matrix => Al= 13. IfA is a square matrix => A.(AdjA) =(AdjA)A =|A|.1 l det A 15. Adj(AB) =(Adj B)(Adj A) 14. det(A™) = igus 16. IfAisa square matrix of order n then [Adj A\=| Al , 17. If A is anon singular matrix of order n, then Adj (Adj A) 7 | Al A 18. (AdjA) = = Adj(A*) AI 19. AdjA™ =(Adj A)’ iam J 20. For any scalar k, ‘Adj( y=k™AdjA 7 21. |Adj(Adj (ny ._|Adj (Adj A) =|A]"" (n-1) 22. |Adj Adj Adj A|=|A 3. Azul? Plaq7-_!_|4¢@ > c d ad—bc|-—c a]. : fa 0 0] .. 24. If A=|0 b OJ/and abc 0 then 0 0c fy @ a At=lo 1 9 b 0 0 - Cc cosa sina 0 25. If A(a)=|-sina cosa 0 |then fA(a)] =A (—o) 0 0 I 26. The inverse of a symmetric matrix is symmetric 27. The inverse of a diagonal matrix is a diagonal 28. A is singular => A‘ is singular A is non singular = A™' A’ is non singular 29. If A and B are non singular matrices of the same order then AB isan of the same order. , | - 4 30. If A is a singular matrix then Adj A is also a singular-matrix. 31. If A is a singular then A(‘Adj A) = (Adj A)A=0 32. If |A| =0 then|Adj A|= 33. If A is symmetric then Adj A is also symmetric ~ 34. If A is orthogonal matrix then |A|=+1 35. If A is orthogonal then AT=A7 Example 1.2: _ [CS-GATE '98] i ba eM b TOIOKIOS & 2 A If A=|1 b_ cal then which of the SOLOWng 3 isa acten of A dl ice pcabl >: (A) atb (B) a—b (C) abo (D) atbte Solution: — (B) ; | 1 a be A=j1 b ca 1 c ab 1.2 RANK OFA MATRIX SANK OF A MATRIX Submatrix: A matrix obtained by deleting some rows or columns or both of given matrix is Called sub matrix. Minor of a matrix: The determinant of a Square sub matrix of given matrix is called a minor of the matrix. If the order of the Square sub matrix is r then its determinant is called a minor of order r. Example 1.5: 21a AE 3 1 A= : 1 2 3 | . 6 7 4x3 Solution: We have 2 1 | 0 B= ; 1 is a submatrix of order 2. | |B = 2—3=-—1 is a minor of order 2. 2 1 1 . C=|3 1 2] isa submatrix of order 3. 5 6 7 IC =-—§ is a minor of order 3. 1.2.1 Rank of a Matrix Let A be m x n matrix. r1s said to berank ofA if cre 1. Every (r+ 1)" order minor of A’is zero. 2. There exists at least one r™ order minor of A which is not zero. 1 e., rank of A =p(A) = the order of largest order of non-zero minorofA. — Results 1. IfA is null matrix then, p(A)=0 Rank of a matrix is unique Every matrix will have a rank... 2 3 4, p(A,,.. )< minimum of {m,n} 5. p(A,., =n <> |A] #0 6. p(A,,,)|A|=0 7 p(A+B)<(p(A)+p(B)) © 8. p(A-B)2(p(A)-p(B)) 9, (AB) < minimum of {p(A),9(B)} 10. p(I,)=n. 11. If p(Ayq)=n then p(adjA) = If p(Ayn ) = 2 —1 then p(adjA)=1 If p(A,,.) <0 —2 then p(adjA) =0 12. p(A)=p(A") Example 1.6: -1 0 6 Find the rank of the matrix A=| 3 6 1 7 5 1 3 ey Solution: We have det A =—1(18-1)- -0(9+5)+6(3+30) =-17-0+ 6(33)=18140 We have minor of order 3 + 0. p(A) =3. Example 1.7: —~] oN KO —_ “yw tn co f 1 Find the rank of the matrix | ‘5 - 8 Solution: | Here the matrix is of order 3.x 4. Its rank, < min (3 4):= 3. 1 2 3 Let us consider the minor |5 6 7 8 7 0 Its determinant = 24+0 .. The order of the highest order non-zero minor of A is 3. Hence the rank of the given matrix is 3. Solution: (D) 1 -1 0 GivenS=/1 1 1] =|S)/=1(1)+1(1)=240 00 1 1 1 -l adj(S)=/-1 1 -1 0 0 2 Zero and Non zero row | | If all the elements in a row of a matrix are zeros, then it is called a zero row otherwise, it is called non zero row. Echelon Form of a matrix | A matrix is said to be in Echelon form if it has the following properties. (i) Zero rows, if any, are below any non-zero row. (ui) The first non-zero entry in each non-zero row is equal to 1. (ii) The number of zeros before the first non-zero element in a row is less than or equal to the number of such zeros in the next row. Note: The condition (11) is optional. Important Result: The number of non-zero rows in the row echelon form of A is the rank of A. 100 2 3 0 010-11 1 ég.1. 10 0 1 #1 2 IJ isarowechelon form. 000 0 0 0 000 0 0 0 1 00 0 0 2.10 1 0 0 0} isin row echelon form. 09000 : 1000] 3, 9 1 0 of. 00 4-4/3 In row echelon form. 0 0 9 0 Example 1.10: 1 2 3 O Reduce the matrix A = ; ; ; into echelon form and hence find rank. | 6 8 7.5 Solution: 1 2 3. 0 243 2 Given matrix is A = 3°2 1 3 6°83 FS 1 2 0 0 3 2 A~\y 4 -8 3 0 -4 -l1l1 5 ; mo 12 3, O — 10 4 -8 3 Applying R <> R,, we get A~ 0 0 3 | 5 0 -4 -l1l 5 12 3 0 0 4 -8 3 Now applying R, >R, R,,we get A~ 00 32 00 32 Lpatenaercorn Yili 0 4 -8 3 Finally applying R, >R,—R;, we get A~ 7 AGS AL NQL. 0.0 0" 01: This is in Echelon form and the number of non-zero rows is 3. ». Rank (A) = p(A)=3. Linearly independent and dependent of vectors 1. A finite set {V,, V,,.--V, .} of vectors said to be linearly dependent if there exist scalars O,,0,,...0, not all zero, such that av, + O,V. +....0,V, =0 Scanned with OKEN Scanner l 2 3 0 -4 4 0 -5 -§ 0 -10 -10 R, 9—R,, R,>—R R 5p 4 SP SE GES 1 2 3 0 1 1 0 1 1 01 1 R, >R,-R,,R,—>R,=R, 1 2 3 0 1 1 0 0 0 0 0 0 + The vectors are linearly dependent. Norm of a vector a Let x =| b |bea vector Cc _ f.2 2 2 then norm of a vector = |X| — Ja? +b? +c Normalized vector ; a/ Ja? +b? +02.) 7 If x =| b |, the normalized vector = i ix] = b/ Ja’ +b? +c? viec odes mii POUSUHS Of iG 3 | Ja? +b? +c? | 1 Ex: x=|0| then bx|=¥5 | Orthogonal vectors and orthonormal vectors Two vectors X, Y in R" are said to be orthogonal if xTy=0 Ex: (1,-1,0) (-1,-1,1) —| (1-1,0)| -1 =—-14+1+0=0 1 1.3 Ortho normal vectors The vectors X and Y are said to be orthonorma Lif 1. Xand Y are orthogonal 2. [X|=1 and YI! Note: Orthogonal vectors are always linearly independent. SYSTEM OF LINEAR EQUATIONS aX) + Am2X2 te F Amn _ ‘s called system of m linear equations inn Matrix form AX = B. =D, unknowns. Gj vosenessesones Ain yj snsesnsenerees oe ; where A = is called coefficient matrix. GL pevseeeeeeee: A on xy x =|: | unknown vector X, b, B=|: b Homogeneous system: AX =0 Non Homogeneous system: AX=B Solution of the system: The set of values {Xx,,X2,--- solution. Consistent x, } satisfying all the equations simultaneously 1 If the system has at least one solution then it is called consistent. A Consistent system is said to be determinate if it has unique solution. to be indeterminate if it has more than one solution. A Consistent system is said Inconsistent If the system has no solution then it is said to be Inconsistent. Augmented matrix For th = ¢ system AX = B, augmented matrix is denoted by [ Al B| s called