


Feature Detection





















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
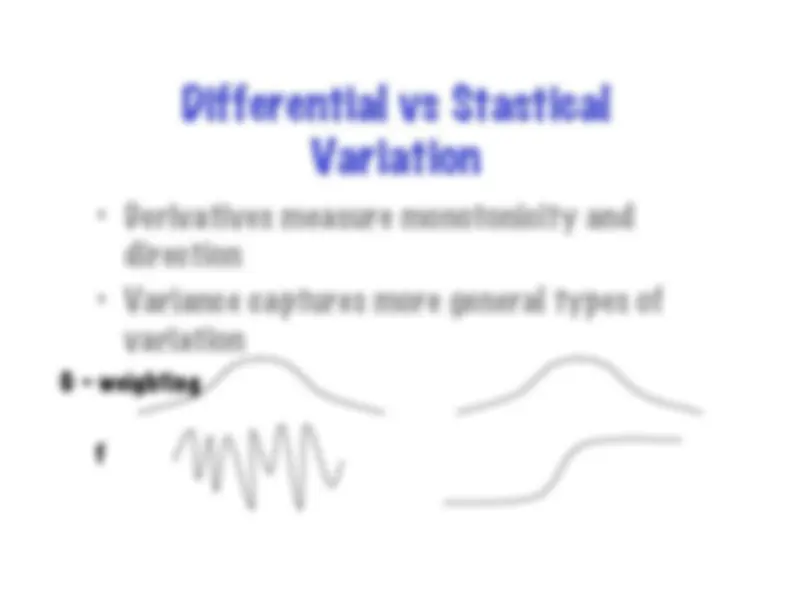
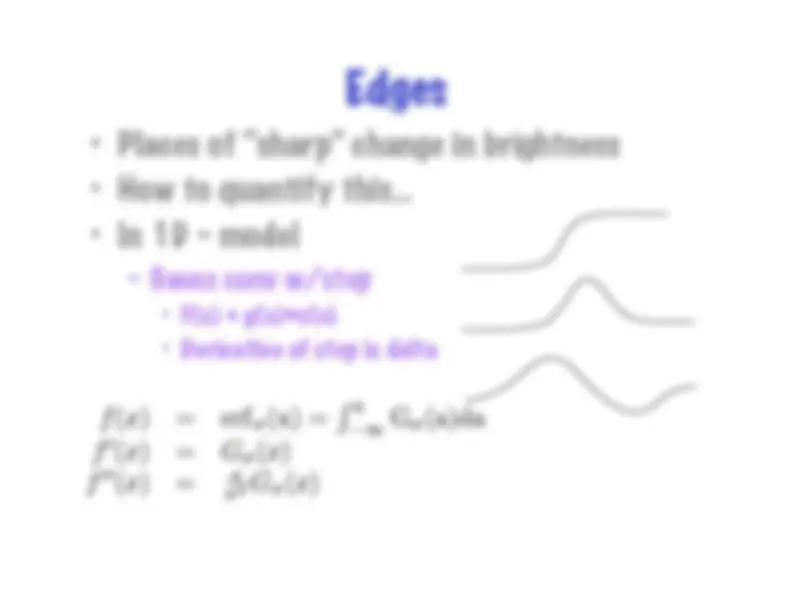
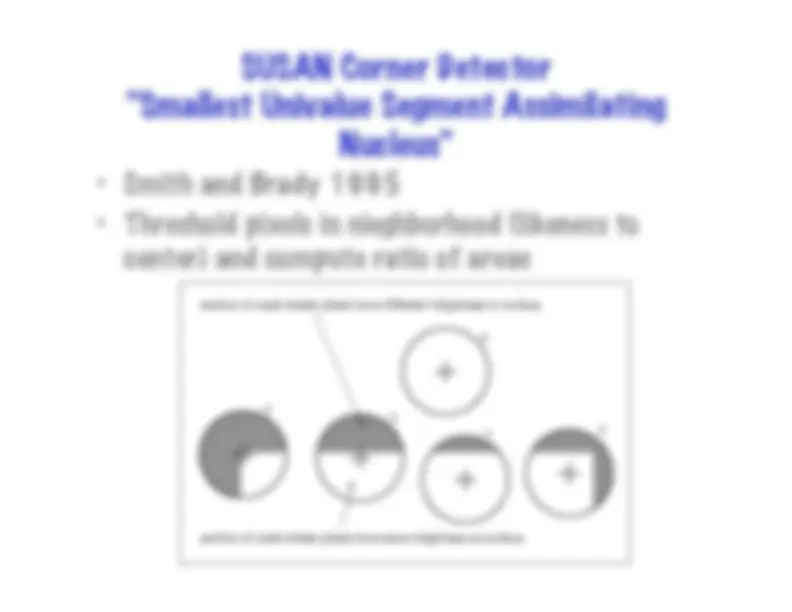
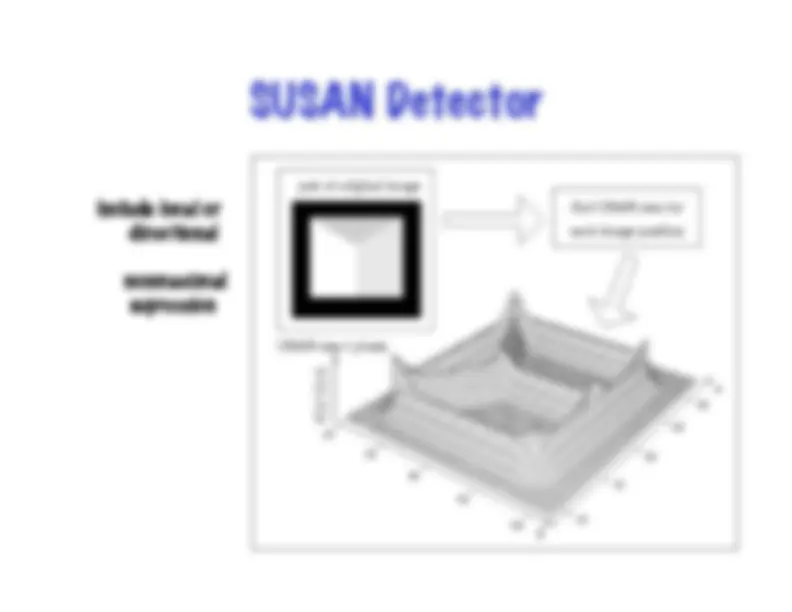
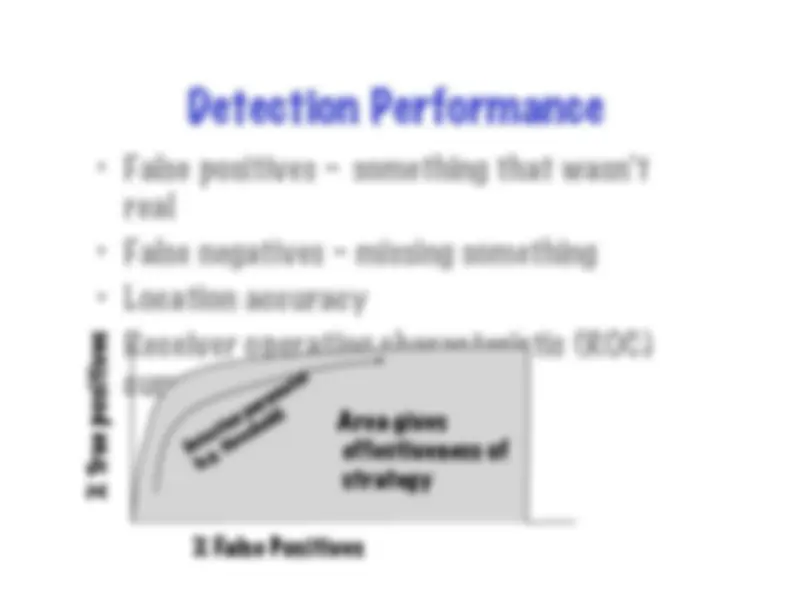
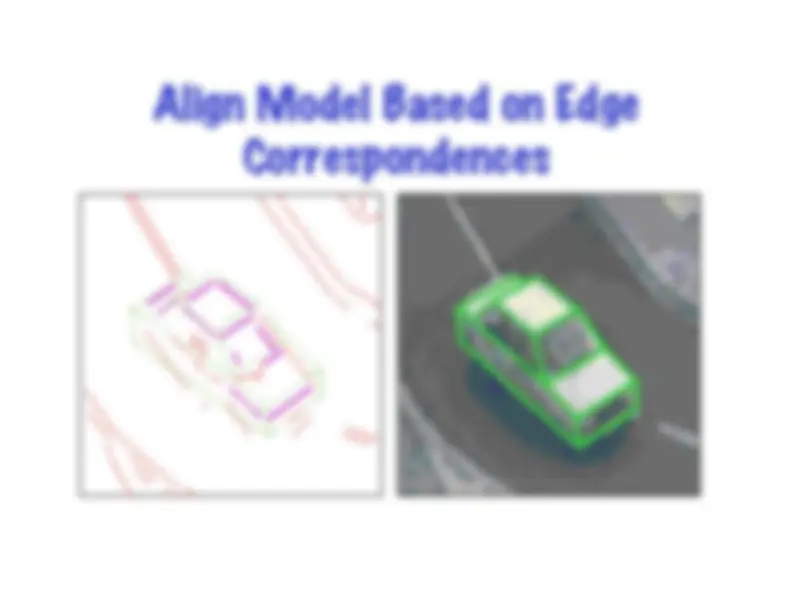
Various feature detection techniques, including differential and statistical methods, edge detection, and corner detection. It covers concepts such as derivatives, scale and smoothing, variance, and connectivity in discrete domains. The document also discusses edge linking and grouping, correspondences, and shape detection using the hough transform.
Typology: Exams
1 / 35

This page cannot be seen from the preview
Don't miss anything!
Thi are edges - All accept all pixels that in the Thi connected components using Tlo - Lower gradient edges can be brought in if they are connected to high-gradient edges Thi –> edges Tlo –> not edges Tlo –> edges
im = im.gaussDiffuse(3.0); im_dx = im.dx(); im_dy = im.dy(); grad_mag = (im_dx.power(2) + im_dy.power(2)).sqrt(); curve = (im.dx(2)im_dy.power(2) + im.dy(2)im_dx.power(2) - 2.0im_dx.dy()im_dxim_dy).abs() /(grad_mag.power(2) + (float)1.0e-2); curve = curve.setBorder(0.0f, 2); curve = grad_magcurve.abs();