Download Fluid Dynamics: Navier-Stokes Equations and Motion of Homogeneous Incompressible Fluids and more Study Guides, Projects, Research Civil Engineering in PDF only on Docsity!
FUNDAMENTAL LAWS AND EQUATIONS
Kinematics
What is a fluid? Specification of motion
A fluid is anything that flows, usually a liquid or a gas, the latter being distinguished by its great rel- ative compressibility. Fluids are treated as continuous media, and their motion and state can be specified in terms of the velocity u , pressure p , density ρ, etc evaluated at every point in space x and time t. To define the den- sity at a point, for example, suppose the point to be surrounded by a very small element (small com- pared with length scales of interest in experiments) which nevertheless contains a very large number of molecules. The density is then the total mass of all
the molecules in the element divided by the volume of the element. Considering the velocity, pressure, etc as func- tions of time and position in space is consistent with measurement techniques using fixed instruments in moving fluids. It is called the Eulerian specification. However, Newton’s laws of motion (see below) are expressed in terms of individual particles, or fluid elements, which move about. Specifying a fluid motion in terms of the position X ( t ) of an individual particle (identified by its initial position, say) is called the Lagrangian specification. The two are linked by the fact that the velocity of such an ele- ment is equal to the velocity of the fluid evaluated at the position occupied by the element:
. (1)
The path followed by a fluid element is called a particle path , while a curve which, at any instant, is everywhere parallel to the local fluid velocity vector
d X d t
= u X [ ( t ), t ]
INTRODUCTION TO FLUID DYNAMICS 7
SCI. MAR., 61 (Supl. 1): 7-24 (^) SCIENTIA MARINA 1997
LECTURES ON PLANKTON AND TURBULENCE. C. MARRASÉ, E. SAIZ and J.M. REDONDO (eds.)
Introduction to Fluid Dynamics*
T.J. PEDLEY
Department of Applied Mathematics and Theoretical Physics, University of Cambridge, Silver St., Cambridge CB3 9EW, U.K.
SUMMARY: The basic equations of fluid mechanics are stated, with enough derivation to make them plausible but with- out rigour. The physical meanings of the terms in the equations are explained. Again, the behaviour of fluids in real situa- tions is made plausible, in the light of the fundamental equations, and explained in physical terms. Some applications rele- vant to life in the ocean are given. Key words : Kinematics, fluid dynamics, mass conservation, Navier-Stokes equations, hydrostatics, Reynolds number, drag, lift, added mass, boundary layers, vorticity, water waves, internal waves, geostrophic flow, hydrodynamic instability.
*Received February 20, 1996. Accepted March 25, 1996.
is called a streamline. Particle paths are coincident with streamlines in steady flows, for which the velocity u at any fixed point x does not vary with time t.
Material derivative; acceleration.
Newton’s Laws refer to the acceleration of a par- ticle. A fluid element may have acceleration both because the velocity at its location in space is chang- ing ( local acceleration ) and because it is moving to a location where the velocity is different ( convective acceleration ). The latter exists even in a steady flow. How to evaluate the rate of change of a quantity at a moving fluid element, in the Eulerian specifica- tion? Consider a scalar such as density ρ ( x , t ). Let the particle be at position x at time t , and move to x
- δ x at time t + δ t , where (in the limit of small δ t )
. (2)
Then the rate of change of ρ following the fluid, or material derivative , is
(by the chain rule for partial differentiation)
(3a)
(using (2))
(3b)
in vector notation, where the vector ∇ρ is the gradi- ent of the scalar field ρ :
A similar exercise can be performed for each component of velocity, and we can write the x -com- ponent of acceleration as
(4a)
etc. Combining all three components in vector short- hand we write
(4b)
but care is needed because the quantity ∇ u is not defined in standard vector notation. Note that ∂ u / ∂t is the local acceleration, ( u .∇) u the convective acceleration. Note too that the convective accelera- tion is nonlinear in u , which is the source of the great complexity of the mathematics and physics of fluid motion.
Conservation of mass
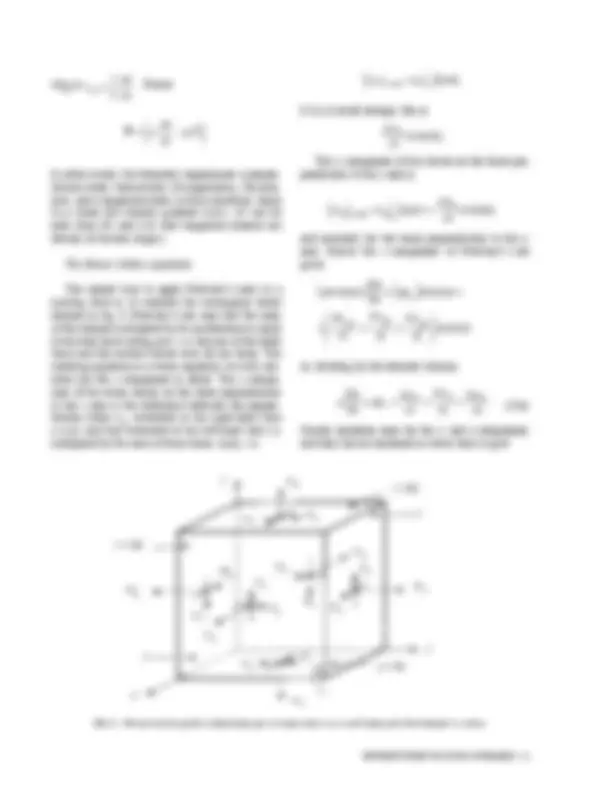
This is a fundamental principle, stating that for any closed volume fixed in space, the rate of increase of mass within the volume is equal to the net rate at which fluid enters across the surface of the volume. When applied to the arbitrary small rec- tangular volume depicted in fig. 1, this principle gives:
Dividing by ∆ x ∆ y ∆ z and taking the limit as the volume becomes very small we get
+∆ x ∆ y ([ ρ w ] z −[ρ w ] z + ∆ z ).
+∆ z ∆ x ([ ρ v ] y −[ρ v ] y + ∆ y ) +
∆ x ∆ y ∆ z
∂ρ ∂ t
= ∆ y ∆ z ([ ρ u ] x −[ρ u ] x + ∆ x ) +
D u D t
∂ u ∂ t
D u D t
∂ u ∂ t
∂ u ∂ x
∂ u ∂ y
∂ u ∂ z
∇ρ =
∂ρ ∂ x
∂ρ ∂ y
∂ρ ∂ z
⎝⎜^
∂ρ ∂ t
∂ρ ∂ t
∂ρ ∂ x
∂ρ ∂ y
∂ρ ∂ z
∂ρ ∂ x
δ x δ t
∂ρ ∂ y
δ y δ t
∂ρ ∂ z
δ z δ t
∂ρ ∂ t
D ρ D t
= lim δ t → 0
ρ( x + δ x , t + δ t ) −ρ( x , t ) δ t
δ x = u ( x , t ) δ t
8 T.J. PEDLEY
FIG. 1. – Mass flow into and out of a small rectangular region of space.
(9a)
or, in shorthand,
F = σ≈ n (9b)
where σ≈ is a matrix quantity, or tensor , depending on x and t but not n or ∆ A. σ≈ is called the stress ten- sor , and can be shown to be symmetric (i.e. σyx= σxy, etc) so it has just 6 independent components. It is an experimental observation that the stress in a fluid at rest has a magnitude independent of n and is always parallel to n and negative, i.e. compres- sive. This means that σ xy= σ yz= σ zx= 0, σ xx= σ yy= σ zz = − p , say, where p is the positive pressure (hydro- static pressure); alternatively,
σ≈ = – p (^) ≈ I (10)
where (^) ≈ I is the identity matrix.
The relation between stress and deformation rate
In a moving fluid, the motion of a general fluid element can be thought of as being broken up into three parts: translation as a rigid body, rotation as a rigid body, and deformation (see fig. 4). Quantitatively, the translation is represented by the velocity field u , the rigid rotation is represented by the curl of the velocity field, or vorticity ,
ω = curl u , (11)
and the deformation is represented by the rate of deformation (or rate of strain) e ≈ which, like stress, is a symmetric tensor quantity made up of the sym- metric part of the velocity gradient tensor. Formally,
(12)
or, in full component form,
Note that the sum of the diagonal elements of e ≈ is equal to div u. It is a further matter of experimental observation that, whenever there is motion in which deformation is taking place, a stress is set up in the fluid which tends to resist that deformation, analogous to fric- tion. The property of the fluid that causes this stress is its viscosity. Leaving aside pathological (‘non- Newtonian’) fluids the resisting stress is generally proportional to the deformation rate. Combining this stress with pressure, we obtain the constitutive equa- tion for a Newtonian fluid :
σ≈ = – p I ≈ + 2μ e ≈ – 2/3 μ div uI ≈ (14)
The last term is zero in an incompressible fluid, and we shall ignore it henceforth. The quantity μ is the dynamic viscosity of the fluid. To illustrate the concept of viscosity, consider the unidirectional shear flow depicted in fig. 4 where the plane y =0 is taken to be a rigid boundary. The normal vector n is in the y -direction, so equations (9) show that the stress on the boundary is
From (14) this becomes
but because the velocity is in the x -direction only and varies with y only, the only non-zero component
F = (^) ( 2 μ e (^) xy , − p +μ e (^) yy , μ e (^) zy ),
F =( σ (^) xy , σ (^) yy , σ (^) zy ).
e ≈
=
∂ u ∂ x
1 2
∂ u ∂ y
+^ ∂ v ∂ x
⎛ ⎝⎜^
⎞ ⎠⎟^
1 2
∂ u ∂ z
+^ ∂ w ∂ x
⎛ ⎝⎜^
⎞ ⎠⎟ 1 2
∂ v ∂ x
+^ ∂ u ∂ y
⎛ ⎝⎜^
⎞ ⎠⎟
∂ v ∂ y
1 2
∂ v ∂ z
+^ ∂ w ∂ y
⎛ ⎝⎜^
⎞ ⎠⎟ 1 2
∂ w ∂ x
+^ ∂ u ∂ z
⎛ ⎝⎜^
⎞ ⎠⎟^
1 2
∂ w ∂ y
+^ ∂ v ∂ z
⎛ ⎝⎜^
⎞ ⎠⎟
∂ w ∂ z
⎛
⎝
⎜ ⎜ ⎜ ⎜ ⎜ ⎜
⎜⎜
⎞
⎠
⎟ ⎟ ⎟ ⎟ ⎟ ⎟
⎟⎟
e ≈
(∇ u +^ ∇ u T )
F (^) z = σ (^) zx n (^) x + σ (^) zy n (^) y + σ (^) zz n (^) z
F (^) y = σ (^) yx n (^) x + σ (^) yy n (^) y + σ (^) yz n (^) z
F (^) x = σ (^) xx n (^) x + σ (^) xy n (^) y + σ (^) xz n (^) z
10 T.J. PEDLEY
FIG. 4. – A unidirectional shear flow in which the velocity is in the x - direction and varies linearly with the perpendicular component y : u = α y. In time ∆ t a small rectangular fluid element at level y 0 is translated a distance α y 0 ∆ t, rotated through an angle α/2, and deformed so that the horizontal surfaces remain horizontal, and the vertical surfaces are rotated through an angle α.
of e ≈ is. Hence
In other words, the boundary experiences a perpen- dicular stress, downwards, of magnitude p , the pres- sure, and a tangential stress, in the x-direction, equal to μ times the velocity gradient ∂u/∂y. (It can be seen from (9) and (14) that tangential stresses are always of viscous origin.)
The Navier-Stokes equations
The easiest way to apply Newton’s Laws to a moving fluid is to consider the rectangular block element in fig. 5. Newton’s Law says that the mass of the element multiplied by its acceleration is equal to the total force acting on it, i.e. the sum of the body force and the surface forces over all six faces. The resulting equation is a vector equation; we will con- sider just the x -component in detail. The x -compo- nent of the stress forces on the faces perpendicular to the x -axis is the difference between the perpen- dicular stress σ xx evaluated at the right-hand face ( x +∆ x ) and that evaluated at the left-hand face ( x ) multiplied by the area of those faces, ∆ y ∆ z , i.e.
If ∆ x is small enough, this is
The x -component of the forces on the faces per- pendicular to the y -axis is
and similarly for the faces perpendicular to the z - axis. Hence the x -component of Newton’s Law gives
or, dividing by the element volume,
(15a)
Similar equations arise for the y - and z -components, and they can be combined in vector form to give
ρ
D u D t
= ρ g (^) x +
∂σ xx ∂ x
∂σ xy ∂ y
∂σ xz ∂ z
( ρ∆ x ∆ y ∆ z )
D u D t
=( ρ gx )∆ x ∆ y ∆ z +
∂σ (^) xx ∂ x
∂σ (^) xy
∂ y
∂σ (^) xz ∂ z
⎟ ∆ x ∆ y ∆ z
⎛⎝ σ xy y + ∆ y −σ xy y ⎞⎠ ∆ z ∆ x = ∂σ xy ∂ y
∆ x ∆ y ∆ z ,
∂σ (^) xx ∂ x
∆ x ∆ y ∆ z.
(^ σ xx x + ∆ x −σ xx x )∆ y ∆ z.
F = μ
∂ u ∂ y
, − p, 0
e (^) xy =
∂ u ∂ y
INTRODUCTION TO FLUID DYNAMICS 11
FIG. 5. – Normal and tangential surface forces per unit area (stress) on a small rectangular fluid element in motion.
When the fluid of interest is water, and the boundary is its interface with the air, the dynamics of the air can often be neglected and the atmosphere can be thought of as just exerting a pressure on the liquid. Then the boundary conditions on the liquid’s motion are that its pressure (modified by a small vis- cous normal stress) is equal to atmospheric pressure and that the viscous shear stress is zero.
CONSEQUENCES: PHYSICAL PHENOMENA
Hydrostatics
We consider a fluid at rest in the gravitational field, with a free upper surface at which the pressure is atmospheric. We choose a coordinate system x, y, z such that z is measured vertically upwards, so g x = g y = 0 and g z = - g , and we choose z = 0 as the level of the free surface. The density ρ may vary with height, z. Thus all components of u are zero, and pressure p = patm at z = 0. The Navier-Stokes equa- tions (16) reduce simply to
Hence (19)
or, for a fluid of constant density,
:
the pressure increases with depth below the free sur- face ( z increasingly negative). The above results are independent of whether there is a body at rest submerged in the fluid. If there is, one can calculate the total force exerted by the fluid by integrating the pressure, multiplied by the appropriate component of the normal vector n , over the body surface. The result is that, whatever the shape of the body, the net force is an upthrust and equal to g times the mass of fluid displaced by the body. This is Archimedes’ principle. If the fluid den- sity is uniform, and the body has uniform density ρ b , then the net force on the body, gravitational and upthrust, corresponds to a downwards force equal to
(20)
where V is the volume of the body. The quantity ( ρ b – ρ) is called the reduced density of the body.
Note that, for constant density problems in which the pressure does not arise explicitly in the boundary conditions (e.g. at a free surface), the gravity term can be removed from the equations by including it in an effective pressure , p e. Put
(21)
in equations (16) (with g x = g y = 0, g z= - g ) and see that g disappears from the equations, as long as p e replaces p.
Flow past bodies
The flow of a homogeneous incompressible fluid of density ρ and viscosity μ past bodies has always been of interest to fluid dynamicists in general and to oceanographers or ocean engineers in particular. We are concerned both with fixed bodies, past which the flow is driven at a given speed (or, equivalently, bodies impelled by an external force through a fluid otherwise at rest) and with self-propelled bodies such as marine organisms.
Non-dimensionalisation: the Reynolds number
Consider a fixed rigid body, with a typical length scale L , in a fluid which far away has con- stant, uniform velocity U ∞ in the x -direction (fig. 6). Whenever we want to consider a particular body, we choose a sphere of radius a , diameter L = 2 a. The governing equations are (8) and (16), and the boundary conditions on the velocity field are
u = v = w = 0 on the body surface, S (22)
u → U ∞ , v → 0, w → 0 at infinity.^ (23)
pe = p + g ρ z
( ρ b −ρ) Vg
p = p (^) atm − g ρ z
p = p atm + g ∫ z^0 ρ dz
∂ p ∂ z
= −ρ g.
∂ p ∂ x
∂ p ∂ y
INTRODUCTION TO FLUID DYNAMICS 13
FIG. 6. – Flow of a uniform stream with velocity U ∞ in the x -direc- tion past a body with boundary S which has a typical length scale L.
Usually the flow will be taken to be steady, ie
, but we shall also wish to think about devel-
opment of the flow from rest. For a body of given shape, the details of the flow (i.e. the velocity and pressure at all points in the fluid, the force on the body, etc) will depend on U ∞, L , μ and ρ as well as on the shape of the body. However, we can show that the flow in fact depends only on one dimensionless parameter, the Reynolds number
(24)
and not on all four quantities separately, so only one range of experiments (or computations) would be required to investigate the flow, not four. The proof arises when we express the equations in dimensionless form by making the following trans- formations:
Then the equations become: (8b):
; (25)
(16a), with replaced by (4a):
and there are similar equations starting with ∂ v ´ / ∂ t ´, ∂ w ´ / ∂ t ´. The boundary condition (22) is unchanged, though the boundary S is now non-dimensional, so its shape is important but L no longer appears. Boundary condition (23) becomes
at infinity. (27)
Thus Re is the only parameter involving the physi- cal inputs to the problem that still arises. The drag force on the body (parallel to U ∞) proves to be of the form:
(28)
where A (proportional to L 2 )is the frontal area of the body (π L^2 / 4 for a sphere) and C (^) D is called the drag coefficient. It is a dimensionless number, computed by integrating the dimensionless stress over the sur- face of the body. From now on time and space do not permit deriva- tion of the results from the equations. Results will be quoted, and discussed physically where appropriate. It can be seen from (26) that, in order of mag- nitude terms, Re represents the ratio of the non- linear inertia terms on the left hand side of the equation to the viscous terms on the right. The flow past a rigid body has a totally different char- acter according as Re is much less than or much greater than 1.
Low Reynolds number flow
When Re <<1, viscous forces dominate the flow and inertia is negligible. Reverting to dimensional form, the Navier-Stokes equations (16d) reduce to the Stokes equations
, (29)
where gravity has been incorporated into pe using eq. (21). The conservation of mass equation div u = 0, is of course unchanged. Several important con- clusions can be deduced from this linear set of equa- tions (and boundary conditions). (i) Drag The force on the body is linearly related to the velocity and the viscosity: thus, for example, the drag is given by
(30)
for some dimensionless constant k (thus the drag coefficient C (^) D is inversely proportional to Re ). In particular, for a sphere of radius a , k = 3π, so
(31)
It is interesting to note that the pressure and the viscous shear stress on the body surface con- tribute comparable amounts to the drag. The net gravitational force on a sedimenting sphere of density ρ b , from (20), is ( ρb - ρ)·4/3π a^3 g. This must be balanced by the drag, 6π U (^) s a, where U (^) s is the sedimentation speed. Equating the two gives
U (32)
s =^
( ρ b −ρ) ga^2 μ
D = 6 πμ U ∞ a
D = k μ U ∞ L
∇ pe =μ∇^2 u
D = 12 ρ U^2 AC (^) D
u ′→ 1, v ′→ 0, w ′→ 0
∂ u ′ ∂ t ′
∂ u ′ ∂ x ′
∂ u ′ ∂ y ′
∂ u ′ ∂ z ′
∂ p ′ ∂ x ′
Re
∂ 2 u ′ ∂ x ′^2
∂ 2 u ′ ∂ y ′^2
∂ 2 u ′ ∂ z ′^2
D u D t
∂ u ′ ∂ x ′
∂ v ′ ∂ y ′
∂ w ′ ∂ z ′
u ′ = u / U ∞ , v ′ = v / U ∞ , w ′ = w / U ∞ , p ′ = p / ρ U ∞^2.
x ′ = x / L , y ′ = y / L , z ′ = z / L , t ′ = U ∞ t / L ,
Re =
ρ LU ∞ μ
∂ ∂ t
14 T.J. PEDLEY
16 T.J. PEDLEY
FIG. 8. – Photographs of streamlines (a, b) or streaklines (c) for steady flow past a circular cylinder at different values of the Reynolds number (M.Van Dyke, 1982): ( a ) Re <<1, ( b ) Re ≈ 26, ( c ) Re ≈ 105.
a
b
c
segment of the flagellum moving perpendicular to itself relative to the water as is generated by the same segment moving parallel to itself. This fact forms the basis of resistive force theory for flagellar propulsion, which is a simple and rea- sonably accurate model for the analysis of flagel- lar locomotion.
Vorticity
The dynamics of fluid flow can often be most deeply understood in terms of the vorticity , defined by equation (11) and representing the local rotation of fluid elements. High velocity gradients corre- spond to high vorticity (see fig. 4). If we take the curl of every term in the Navier-Stokes equation we obtain the following vorticity equation (in vector notation):
(35)
where ν = μ / ρ is the kinematic viscosity of the fluid (assumed constant). This equation tells us that the vorticity, evaluated at a fluid element locally parallel to ωω, changes, as that element moves, as a result of three effects, each repre- sented by one of the terms on the right hand side of (35). The first term can be shown to be associ- ated with rotation and stretching (or compres- sion) of the fluid element, so that the direction of ωω remains parallel to the original fluid element, and increases in proportion as the length of that element changes. Such vortex-line stretching is a dominant effect in the generation and mainte- nance of turbulence. It is totally absent in a two- dimensional (2D) flow in which there is no velocity component in one of the coordinate directions (say z ) and the variables are indepen- dent of z. The second term represents the effect of viscosity, and is diffusion -like in that vorticity tends to spread out from elements where it is high to those where it is low. The last term comes about only in non-uniform (e.g. stratified) fluids, and can be important in some oceanographic sit- uations. It can also be shown that, in a flow started from rest, no vorticity develops anywhere until viscous diffusion has had an effect there. As we shall see, the only source of vorticity, in such a flow and in the absence of the last term in (35), occurs at solid boundaries on account of the no- slip condition.
Higher Reynolds number.
It is convenient now to restrict attention to a 2D flow of a homogeneous fluid past a 2D body such as a circular cylinder (fig. 8). In such a 2-D flow, with velocity components u = ( u , v ,0), functions of x , y and t , the vorticity is entirely in the third, z , direction, and is given by
There is no vortex-line stretching, and the only effect which can generate vorticity anywhere is viscosity. Let us suppose that the uniform stream at infinity is switched on from rest at the initial instant. Initially there is no vorticity anywhere, and the initial irrotational velocity field is easy to calculate. It satisfies all the governing equations and all boundary conditions except the no-slip condition at the cylinder surface. The predicted slip velocity therefore generates an infinite veloci- ty gradient ∂u / ∂y and hence a thin sheet, of infinite vorticity at the cylinder surface. Because of vis- cosity, this immediately starts to diffuse out from the surface. At low values of Re , when viscosity is dominant and the convective term ( u .∇) ωω in (35) is negligible, the diffusion is rapid, and vorticity spreads out a long way in all directions. An even- tual steady state is set up in which the flow is almost totally symmetric front-to-back (fig. 8a); unlike the spherical case, the drag coefficient is not quite inversely proportional to the Reynolds number:
At somewhat higher values of Re , the ( u .∇) ωω term is not totally negligible, and once vorticity has reached any particular fluid element it tends to be carried along by it as well as diffusing on to other elements. Hence a front-to-back asymmetry devel- ops. For Re greater than about 5 the flow actually separates from the wall of the cylinder, forming two slowly recirculating flow regions (eddies) at the rear. At still higher Re , it is observed that the eddies tend to break away alternately from the two sides of the cylinder, usually at a well-defined frequency equal to about 0.42 U ∞/ a for Re ≥ 600, and steady flow is no longer possible. At higher Re the wake becomes turbulent (i.e. random and three-dimen- sional) and at Re ≈ 2 × 10 5 the flow on the cylinder surface becomes turbulent.
C D =
8 π
Re log 7.4 /( Re )
ω =
∂ v ∂ x
∂ u ∂ y
∂ω ∂ t
+ ( u .∇) ω =( ω .∇) u + ν∇^2 ω +
1 ρ^2
∇ρ ∧ ∇ p
INTRODUCTION TO FLUID DYNAMICS 17
round the body. In a steady flow of constant density fluid in which viscosity is unimportant (e.g. outside the boundary layer and wake of a body) equation (16d) can be integrated to give the result that the quantity
(37a)
along streamlines of the flow. Here z is measured vertically upwards and | u | is the total fluid speed. This result is equivalent to the Newtonian principle of conservation of energy; equation (37a) is called Bernoulli’s equation. If we forget about the gravita- tional contribution, replacing p + pgz by the effec- tive pressure pe (eq. 21), equation (37a) becomes
p (^) e = constant – (37b)
henceforth we just write p for pe. If the fluid speeds up, the pressure falls, and vice versa, which is intu- itively obvious since a favourable pressure gradient is clearly required to give fluid elements positive acceleration. In the case of flow past a symmetric body, (fig. 10a), all streamlines start from a region of uniform pressure ( p ∞ say) and uniform velocity ( U ∞), so the constant in (37b) is the same for all streamlines, p ∞+1/2 U^2 ∞. If viscosity were really negligible, then the flow round a circular cylinder would be sym-
metric (fig. 10a). At the front stagnation point S 1 , the point of zero velocity where the streamline dividing flow above from flow below impinges, the pressure is high ( p = p ∞+1/2 ρ U^2 ∞), and this high pressure is balanced by an equally high pressure at the rear stagnation point S 2. The pressure at the sides ( A 1 , A 2 ) is low ( p = p ∞–3/2 U^2 ∞). The net effect is that the hydrodynamic force on the cylinder is zero. In a viscous fluid, as stated above, there is a thin boundary layer on the front half, in which the velocity falls from a large value to zero, so the pres- sure distribution is similar to that described above; however the flow separates on the rear half and things are very different. The reason for the separa- tion is that the adverse pressure gradient (the pres- sure rise), from A 1 to S 2 say, causes the low veloci- ty in the boundary layer to tend to reverse its direc- tion, and it is observed that separation occurs as soon as flow reversal takes place. In the separated flow region (fig. 10b) the fluid velocity is low and the pressure remains close to its value at the sides. Thus there is a front-to-back pressure difference proportional to ρ U (^2) ∞, and the drag coefficient C (^) D (eq. 28) is approximately constant, independent of Re as long as Re is large (see fig. 11). The direct contribution of tangential viscous stresses to the drag is negligibly small, although it is the presence of viscosity which causes the flow separation in the first place.
ρ u^2 ;
p + pgz +
ρ u^2 = constant
INTRODUCTION TO FLUID DYNAMICS 19
CD
Re=U ∞^ D
D (mm)
FIG. 11. – Log-log plot of drag coefficient versus Reynolds number for steady flow past a circular cylinder. [The sharp reduction in CD at Re ≈ 2 × 10 5 is associated with the transition to turbulence in the boundary layer]. Redrawn from Schlichting (1968).
Lift. For a symmetric streamlined body (fig. 9) flow separation occurs only very near the trailing edge, and direct viscous drag is more important. However, if such a streamlined body (or wing) is tilted so that the oncoming flow makes an angle of incidence with its centre plane, viscosity again has an important effect. In general, a non-viscous flow past a wing at incidence would turn sharply round the trailing edge, where the velocity would be extremely high and the pressure extremely low (fig. 12a). As the flow starts up from rest, viscosity caus- es separation at the corner, a concentrated vortex is shed and left behind, and thereafter the flow is forced to come tangentially off the trailing edge: the Kutta-condition (fig. 12b). In order to achieve this tangential flow, the velocity on top of the wing must increase and the velocity below must decrease. It follows from Bernoulli’s equation that the pressure above the wing must fall, and that below rise, so a transverse force is generated. This is call lift and keeps aircraft and birds in the air against gravity. The magnitude of the lift is also represented by a lift coefficient CL :
(38)
where S is the horizontal area of the wing. Like C (^) D , CL is approximately independent of Re for large Re. Added mass. We have seen that the force on a body in an inviscid fluid is zero when the flow is steady. When the flow is unsteady, however, the force is non-zero, because accelerating the body rel- ative to the fluid requires that the fluid also has to be accelerated. Thus the body exerts a force on the fluid and so, by Newton’s third law, the fluid exerts an equal and opposite force on the body. In all cases, this force is equal in magnitude to the acceleration of the body relative to the fluid multiplied by the mass of fluid displaced by the body ( ρ V in the nota- tion of eq. 20) multiplied by a constant, say β:
F= βρ V dU/dt. (39)
For a sphere, β = 0.5; for a circular cylinder, β = 1. The quantity βρ V is call the added mass of the body in question (recall that ρ is the fluid density). The corresponding force, given by (39), is called the acceleration reaction , or the reactive force. Fish swimming. We have seen that flagellates such as spermatozoa swim by sending bending waves down their tails, and thrust is generated through the viscous, resistive force. Inertia is negli-
gible because the Reynolds number is small. For most fish, the Reynolds number is large, but never- theless many fish also swim by sending a bending wave down their bodies and tails. In this case, how- ever, thrust is generated primarily by the reactive force associated with the sideways acceleration of the elements of fluid as they pass down the animal (rela- tive to a frame of reference fixed in the fish’s nose). Lighthill has developed a simple, reactive-force model for fish swimming.
Flow in the open ocean
Water waves
The most obvious dynamical feature of the ocean, to even a casual observer, is the presence of surface waves , of a variety of lengths and heights. Waves are mainly generated as a result of stresses exerted by the wind, although they can also arise through the impact or relative motion of foreign bodies such as rain drops or ships. Once generated, however, waves can propagate over large distances and persist for long times, unaffected by the atmos- phere or solid bodies.
L =
U ∞^2 SC L ,
20 T.J. PEDLEY
(a)
(b)
FIG. 12. – Flow past a streamlined body at incidence. ( a ) Idealised flow of a fluid with no viscosity - large velocity and pressure gradi- ent round the trailing edge. ( b ) In a viscous fluid the flow must come smoothly off the trailing edge, which explains the generation of lift (see text).
thermoclines, in which the density gradient is steep- er than elsewhere. Whether the density gradient is uniform or locally sharp, less dense fluid sits, in equilibrium, above denser fluid. A disturbance to this state causes some heavy fluid elements to rise above their original level, and some light ones to fall below. As in the case of surface waves, gravity then provides a restoring force and internal gravity waves can propagate. As for surface waves, a relation can be calculated between the frequency and the wave number of such waves. For example, if there is a sharp interface between two deep regions of fluid with densities ρ 1 (above) and ρ 2 , then equation (41) is replaced by
(46)
This can be seen to give much lower frequencies than (41) if ( ρ 2 – ρ 1 ) is not large: if ρ 2 – ρ 1 = 0.1 ρ 2 , then the frequency given by (46) is 4.4 times small- er than that given by (41) (with ρ 2 = ρ). The propa- gation speed is correspondingly smaller, too. When the density gradient is uniform, with
(47)
where N is a constant with the dimensions of a fre- quency (the Brunt - Väisälä frequency), the situation is a bit more complicated, because internal waves do not have to propagate horizontally. Indeed, a wave whose crests propagate at an angle θ to the horizon- tal, so that the displacement of a fluid element is given by
has a frequency ω given by
. (48)
However, the group velocity (velocity of a wave front, or of energy propagation) is perpendicular to the phase velocity, and in this case is given by the vector
(49)
Rotating fluids: geostrophic flows
Gravity waves are (mostly) small-scale phenom- ena for which the rotation of the earth is unimpor- tant. That is not the case with ocean currents and the
large-scale circulation of the oceans. To analyse such motions, it is necessary to recognise that the natural frame of reference is fixed in the rotating earth, and the governing equations of motion have to be changed accordingly. If viscosity is neglected, the equation of motion of a fluid in a frame of reference rotating with constant angular velocity Ω becomes (in place of (16d)):
(50)
Here g has been modified to include the small “cen- trifugal force’’ term, and we could also incorporate it into the pressure using (21). The additional term is called the Coriolis force. Time does not permit a thorough investigation of the dynamics of rotating fluids. We consider only a flow in which the Coriolis force is much larger than the other inertia terms and therefore must by itself balance the gradient in (effective) pressure: a geostrophic flow. For such a flow, (50) reduces to
(51)
Suppose the flow is horizontal: u = ( u , v , 0 ), with z vertically upwards again. Then the horizontal com- ponents of the pressure gradient are given by
(52)
where Ω (^) υ is the vertical component of the earth’s angular velocity (total angular velocity multiplied by the sine of the latitude). The pressure gradient is perpendicular to the velocity, or vice versa, indicat- ing that if there is a horizontal pressure gradient, the corresponding geostrophic flow will be perpendicu- lar to it. This explains why the wind goes anticlock- wise round atmospheric depressions in the northern hemisphere (clockwise in the southern hemisphere). Similar flows occur in the oceans, although the bar- riers formed by the continents are impermeable, unlike in the atmosphere. The condition for a steady flow to be geostroph- ic is that the inertia term ( u. ∇) u should be small compared with the Coriolis term. Thus if U is a typ- ical velocity magnitude, and L a length scale for the flow, the geostrophic approximation will be a good one if
i.e. the Rossby number should be small:
U^2
L
<< Ω vU ,
∂ p ∂ x
= −Ωυ v ,
∂ p ∂ y
= +Ωυ u
ρΩ ∧ u = −∇ p.
ρΩ ∧ u
ρ
D u Dt
c g =
N
k
sin θ ( sin θ, 0, − cos θ).
ω = N cos θ
y = A cos[( ω t − k x ( cos θ + z sin θ))],
g ρ
d ρ dz
= − N^2 ,
ω 2 = gk [( ρ 2 −ρ 1 ) / ( ρ 2 + ρ 1 )].
22 T.J. PEDLEY
If the Rossby number is large, the earth’s rotation can be neglected. Note that the Rossby number is always large at the equator, where Ω v = 0.
Hydrodynamic instability
A smooth, laminar flow becomes turbulent as a result of hydrodynamic instability. Small, random perturbations are inevitably present in any real sys- tem; if they die away again, the flow is stable, but if they grow large, the original flow becomes unrecog- nisable and is unstable. Usually, steady flows which are slow or weak enough are stable, but they become unstable above some critical speed or strength. The way to investigate instabilities mathemati- cally is to assume that the disturbances to the steady state are very small and to linearise the equations accordingly. Thus, if the steady state velocity, pres- sure and density are given by u 0 ( x ), p 0 ( x ) and ρ 0 ( x ) (all functions of position, in general) it is postulated that, with the perturbation, we have
where u ′, p ′ and ρ′ are small. Then these are sub- stituted into the governing equations, and terms involving squares or products of small quantities are neglected, so the equations are linearised. For example, equation (7) which, with (3b), is
becomes
(54)
and the nonlinear term u ′∇ρ′ is neglected. After linearisation, it is usually possible to think of the disturbance as made up of many modes in which the variables depend sinusoidally on one or more space coordinates and exponentially on time, e.g.
(55)
(cf 42), where and we are using complex number notation. Such terms are substituted into the
equations, and it turns out that a solution of the sup- posed form exists only if σ takes a particular value. If that value has negative (or zero) real part, the dis- turbance dies away (or oscillates at constant ampli- tude); if it has positive real part it grows exponen- tially, indicating instability. If any disturbance of the form (55) (i.e. for any values of k and l ) grows, then the flow is unstable, because in general all distur- bances are present, infinitesimally, at first. Consider, for example, the case of two fluids of different densities, one on top of the other. We have seen that the frequency of a disturbance of wavenumber k is given by equation (46) if ρ 2 (the density of the lower fluid) is greater than ρ 1. However, if ρ 1 > ρ 2 , ω^2 as given by (46) is negative. But if we replace ω by i σ, σ^2 is positive, σ is real, and the oscillation cos ω t can be written as 1/2( e^ σ t^ + e-^ σ t ).Thus exponential growth is predicted. Hence the interface between a dense fluid and a less dense fluid below it is unstable. A similar analysis can be performed for a contin- uous density distribution, denser on top, caused by a temperature gradient, say, in a fluid heated from below. In this case the diffusion of heat (and hence density) must be allowed for, as well as conserva- tion of fluid mass and momentum. For example, a horizontal layer of fluid, contained between two rigid horizontal planes, distance h apart and main- tained at temperatures T 0 (top) and T 0 + ∆ T (bot- tom) is unstable if the temperature difference ∆ T is large enough. More precisely, instability occurs if a dimensionless parameter called the Rayleigh number Ra exceeds the critical value of 1708, where
(56)
Here α, ν and κ are fluid properties, the coefficient of expansion, the kinematic viscosity ( μ/ ρ) and the thermal diffusivity respectively. When instability occurs, for values of Ra not much greater than 1708, the resulting motion is a regular array of usually hexagonal cells (fig. 13), with fluid flow up in the centre of the cells and down at the edges. Such a motion is an example of thermal convection , called Rayleigh-Benard convection. When Ra is much higher than 1708, the cells themselves become unstable, the convection becomes very complicated and eventually turbulent. Rayleigh-Benard convection is an example in which instability of the original steady state leads to another, regular, steady motion which itself goes
Ra =
g α∆ Th^3 νκ
i = − 1
ρ' = f z ( ) exp (^) { i kx ( + ly ) + σ t }
∂ρ′ ∂ t
∂ρ ∂ t
u = u 0 ( ) + x u ' ( x , t ),
p = p 0 ( ) + x p ' ( x, t ),
ρ = ρ 0 ( ) + x ρ' ( x, t )
U^2
Ω v L
INTRODUCTION TO FLUID DYNAMICS 23