Download Force - Engineering Mechanics - Statics - Lecture Slides and more Slides Mechanical Engineering in PDF only on Docsity!
Chp 2: Force
DeComposition
Force Defined
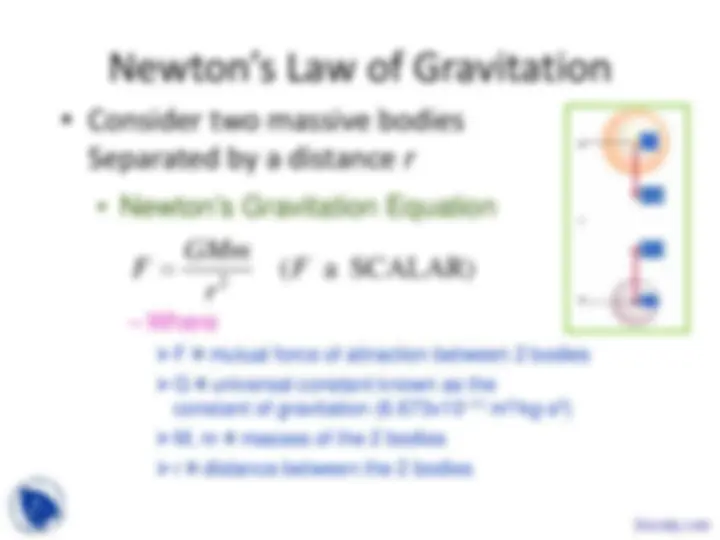
- Force: Action Of One Body On Another ; Characterized By Its - Point Of Application - Magnitude (intensity) - Direction
The DIRECTION of a Force Defines its Line of Action (LoA)
Magnitude
Line of Action
Direction
Point of Application
Weight
- Consider An Object of mass, m, at a modest Height, h, Above the Surface of the Earth, Which has Radius R - Then the Force on the Object (e.g., Yourself)
m [ ] g R
F m GM R h
F GMm =
⇒ ≈
= 2 but R h 2
W = mg
This Force Exerted by the Earth is called Weight
- While g Varies Somewhat With the Elevation & Location, to a Very Good Approximation - g ≈ 9.81 m/s 2 ≈ 32.2 ft/s 2
Earth Facts
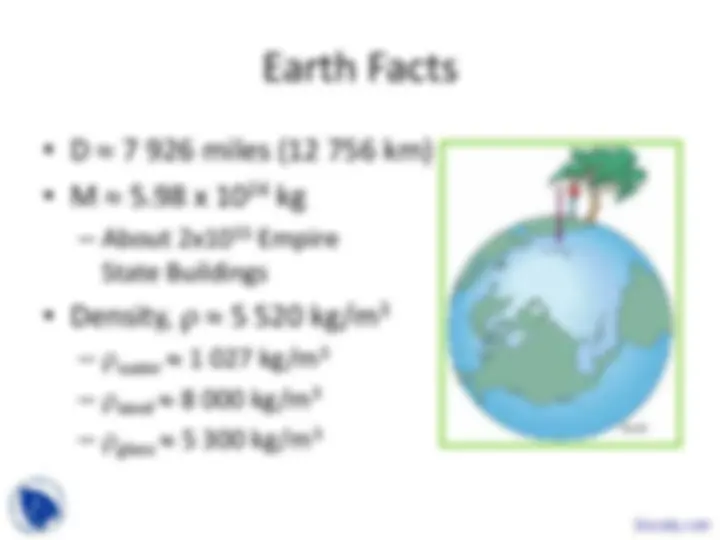
- D ≈ 7 926 miles (12 756 km)
- M ≈ 5.98 x 10^24 kg
- About 2x10^15 Empire State Buildings
- Density, ρ ≈ 5 520 kg/m^3
- ρwater ≈ 1 027 kg/m 3
- ρsteel ≈ 8 000 kg/m 3
- ρglass ≈ 5 300 kg/m 3
Europa Weight
- Since your MASS is SAME on both Earth and Europa need to Find only geu and compare it to gea
- Recall
R^2
GM
g ≈
Europa Statistics from table: M (^) eu = 4.8x10^22 kg Reu = 1 569 km
Then g (^) eu
( 3 )^2
22 2 11 3 1569 10
6 673 10 48 10 m
kg kg s g (^) eu m ×
× ≈ × ⋅
. −^.
( )( ) 2 2
3 12
11 22 2 462 10
6673 10 48 10 kg s m g (^) eu m kg ⋅ ⋅
⋅ × ≈ × − × .
..
g 1 301 m s^2 eu ≈. With %Weu = g (^) eu /g (^) ea
. % .
%. 13 27 9 807
W^1301 eu = =
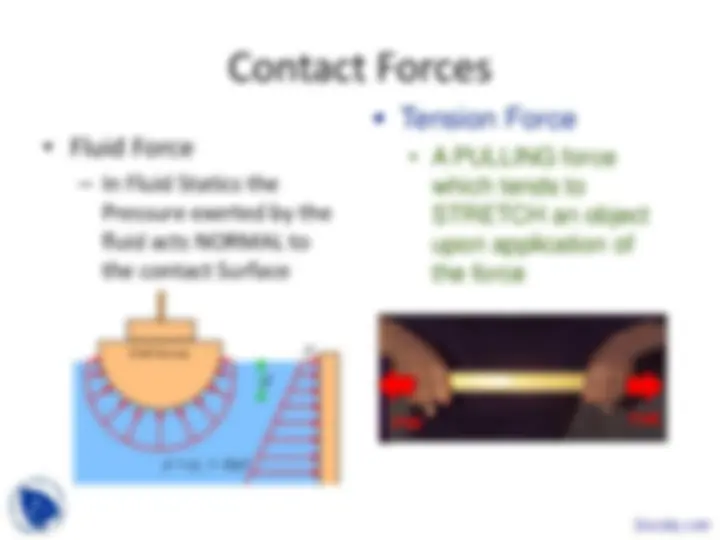
Contact Forces
- Normal Contact Force
- When two Bodies Come into Contact the Line of Action is Perpendicular to the Contact Surface
Friction Force
- a force that resists the relative motion of objects that are in surface contact - Generation of a Friction Force REQUIRES the Presence of a Normal force
Contact Forces
- Compression Force
- A PUSHING force which tends to SMASH an object upon application of the force
Shear Force
- a force which acts across a object in a way that causes one part of the structure to slide over an other when it is applied
Recall Free-Body Diagrams
SPACE DIAGRAM ≡ A Sketch Showing The Physical Conditions Of The Problem
FREE-BODY DIAGRAM ≡ A Sketch Showing ONLY The Forces On The Selected Body
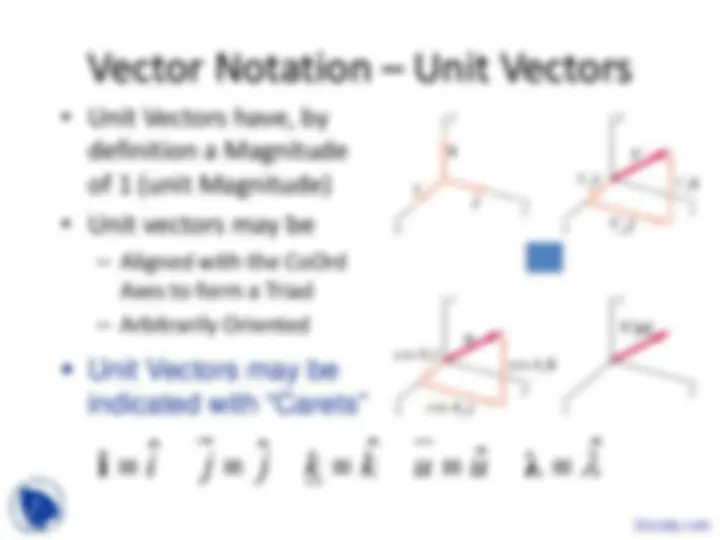
Vector Notation – Unit Vectors
- Unit Vectors have, by definition a Magnitude of 1 (unit Magnitude)
- Unit vectors may be
- Aligned with the CoOrd Axes to form a Triad
- Arbitrarily Oriented
i ≡ i ˆ j ≡ ˆ j k ≡ k ˆ u ≡ u ˆ λ ≡ λ ˆ
Unit Vectors may be indicated with “Carets”
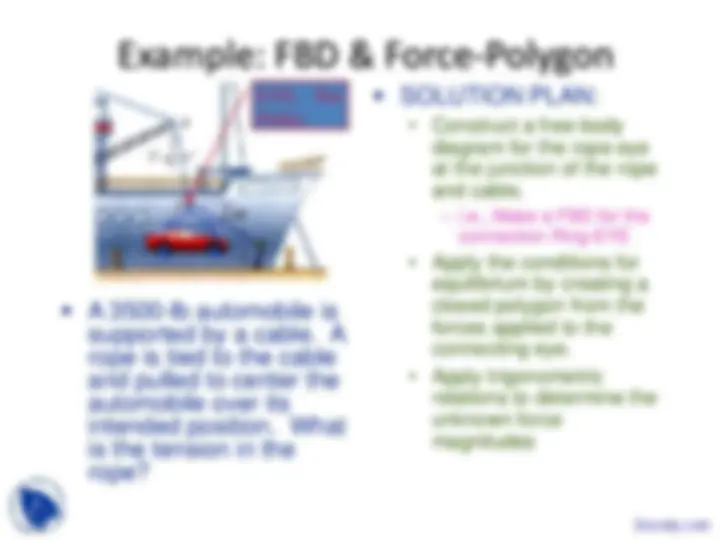
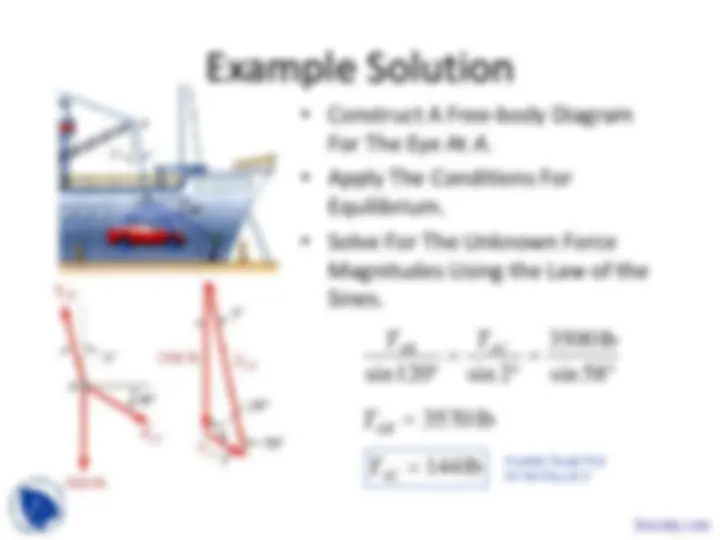
Example: FBD & Force-Polygon EYE, Not Pulley
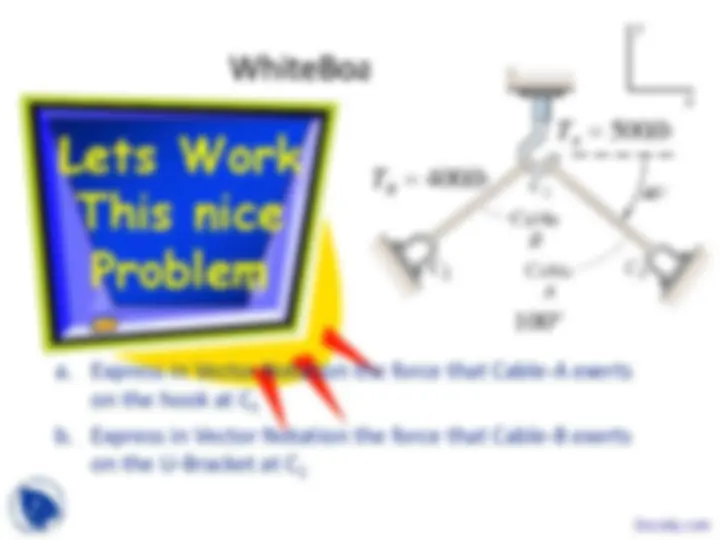
A 3500-lb automobile is supported by a cable. A rope is tied to the cable and pulled to center the automobile over its intended position. What is the tension in the rope?
SOLUTION PLAN:
- Construct a free-body diagram for the rope eye at the junction of the rope and cable. - i.e., Make a FBD for the connection Ring-EYE
- Apply the conditions for equilibrium by creating a closed polygon from the forces applied to the connecting eye.
- Apply trigonometric relations to determine the unknown force magnitudes
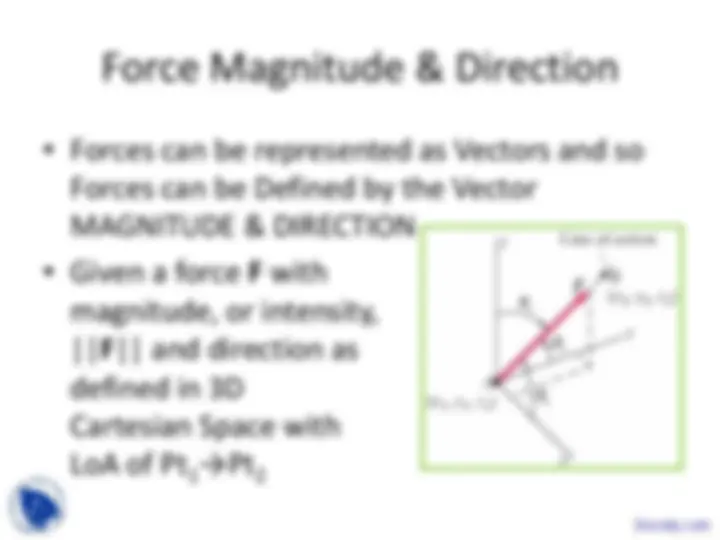
Vector Notation – Vector ID
- In Print and Handwriting We Must Distinguish Between - VECTORS - SCALARS
- These are Equivalent Vector Notations
P ≡ P ≡ P ≡ P
- Boldface Preferred for Math Processors
- Over Arrow/Bar Used for Handwriting
- Underline Preferred for Word Processor
Vector Notation - Magnitude
- The Magnitude of a vector is its Intensity or Strength - Vector Mag is analogous to Scalar Absolute Value → Mag is always positive - Abs of Scalar x → | x | - Mag of Vector P → ||P|| =
- We can indicate a Magnitude of a vector by removing all vector indicators; i.e.:
P = P ≡ P ≡ P ≡ P ≡ Mag of P
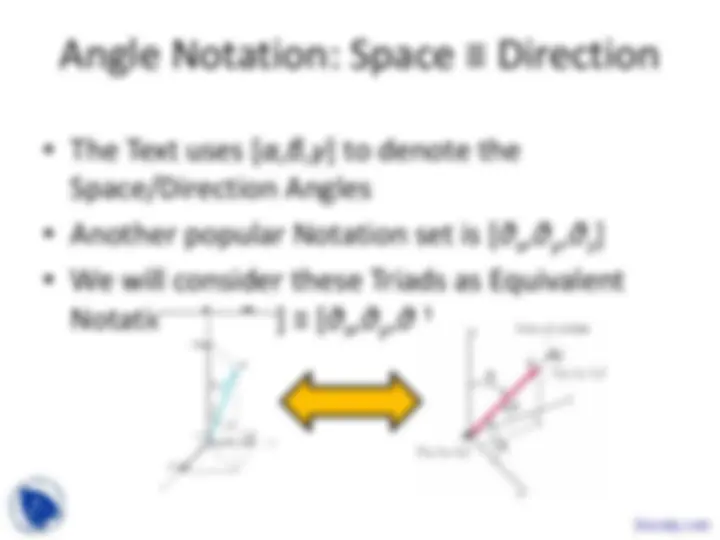
Angle Notation: Space ≡ Direction
- The Text uses [ α , β , γ ] to denote the Space/Direction Angles
- Another popular Notation set is [ θx , θy , θz ]
- We will consider these Triads as Equivalent Notation: [ α , β , γ ] ≡ [ θx , θy , θz ]
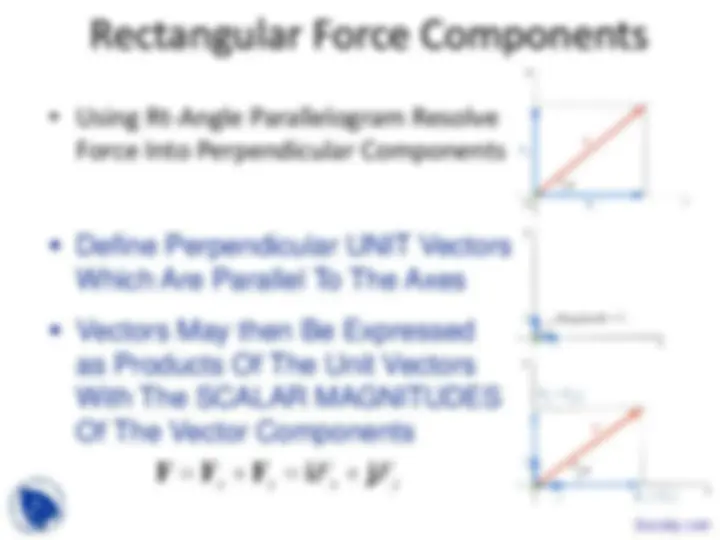
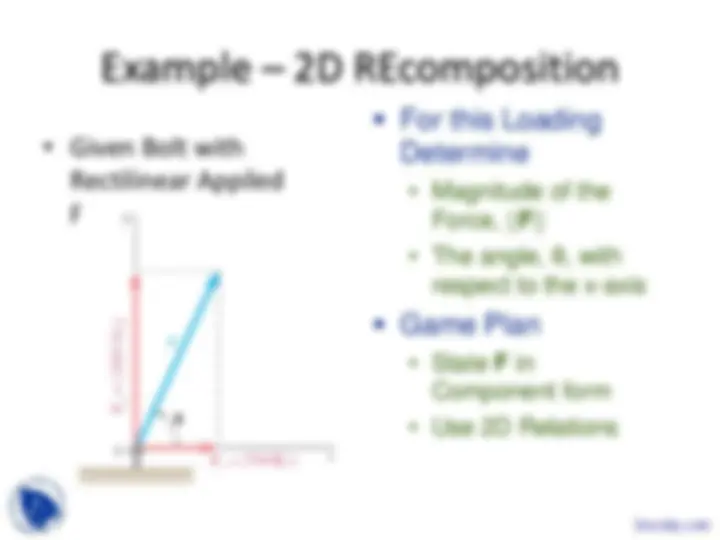
Magnitude-Angle Form
- The Magnitude of the Force is Proportional to the Geometric Length of its vector representation: F ∝ L where L is the Pythagorean Length :
L = ( x 2 − x 1 )^2 + ( y 2 − y 1 )^2 + ( z 2 − z 1 )^2
Note that if Pt 1 is at the ORIGIN and Pt 2 has CoOrds (x, y, z) then
L = x^2 + y^2 + z^2