Download Fourier Transform Properties - Multimedia Signal Processing - Lecture Slides and more Slides Electrical Engineering in PDF only on Docsity!
Lecture 11: Fourier Transform
Properties and Examples
- 3. Basis functions (3 lectures): Concept of basis
function. Fourier series representation of time
functions. Fourier transform and its properties.
Examples, transform of simple time functions.
1. Properties of a Fourier transform
- Linearity & time shifts
- Differentiation
- Convolution in the frequency domain
2. Understand why an ideal low pass filter cannot be
manufactured
Lecture 11: Resources
- Core material
- SaS, O&W, Chapter 4.3, C4.
- SaS, HvV, Chapter 3.
- SaLSA, C, Chapter 5.4, 6.
- Background
- While the Fourier series/transform is very important for representing a signal in the frequency domain , it is also important for calculating a system’s response ( convolution).
- A system’s transfer function is the Fourier transform of its impulse response
- Fourier transform of a signal’s derivative is multiplication in the
frequency domain : j ω X ( j ω)
- Convolution in the time domain is given by multiplication in the frequency domain (similar idea to log transformations)
Linearity of the Fourier Transform
- The Fourier transform is a linear function of x ( t )
- This follows directly from the definition of the Fourier
transform (as the integral operator is linear) & it easily
extends to an arbitrary number of signals
- Like impulses/convolution, if we know the Fourier
transform of simple signals, we can calculate the
Fourier transform of more complex signals which are a
linear combination of the simple signals
1 1
2 2
1 2 1 2
F
F
F
x t X j
x t X j
ax t bx t aX j bX j
ω
ω
ω ω
Fourier Transform of a Time Shifted
Signal
- We’ll show that a Fourier transform of a signal which has a simple time shift is:
- i.e. the original Fourier transform but shifted in phase by – ω t 0
- Proof
- Consider the Fourier transform synthesis equation:
- but this is the synthesis equation for the Fourier transform
- e - j^ ω^0 t^ X ( j ω)
( )
0
0
1 2 1 (^ ) (^0 ) 1 2
j t
j t t
j t j t
x t X j e d
x t t X j e d
e X j e d
ω π ω π ω ω π
∞ −∞ ∞ (^) − −∞ ∞ (^) − −∞
∫
∫
∫
F { x ( t − t 0 )}= e − j ω^ t^0 X ( j ω )
Fourier Transform of a Derivative
- By differentiating both sides of the Fourier
transform synthesis equation with respect to t :
- Therefore noting that this is the synthesis equation
for the Fourier transform j ω X ( j ω)
- This is very important, because it replaces
differentiation in the time domain with multiplication (by j ω) in the frequency domain.
- We can solve ODEs in the frequency domain using
algebraic operations (see next slides)
j ω X j ω
dt
dx t F
1 2
( ) j^ t
dx t
j X j e d
dt
ω π ω^ ω^ ω
∞
−∞
= (^) ∫
- Convolution in the Frequency DomainWe can easily solve ODEs in the frequency domain:
- Therefore, to apply convolution in the frequency domain , we just have to multiply the two Fourier Transforms.
- To solve for the differential/convolution equation using Fourier transforms:
1. Calculate Fourier transforms of x ( t ) and h ( t ): X ( j ω) by H ( j ω)
2. Multiply H ( j ω) by X ( j ω) to obtain Y ( j ω)
3. Calculate the inverse Fourier transform of Y ( j ω)
- H ( j ω) is the LTI system’s transfer function which is the Fourier transform of the impulse response , h ( t ). Very important in the remainder of the course (using Laplace transforms)
- This result is proven in the appendix
y ( t ) h ( t )* x ( t ) Y ( j ω ) H ( j ω) X ( j ω )
F = ↔ =
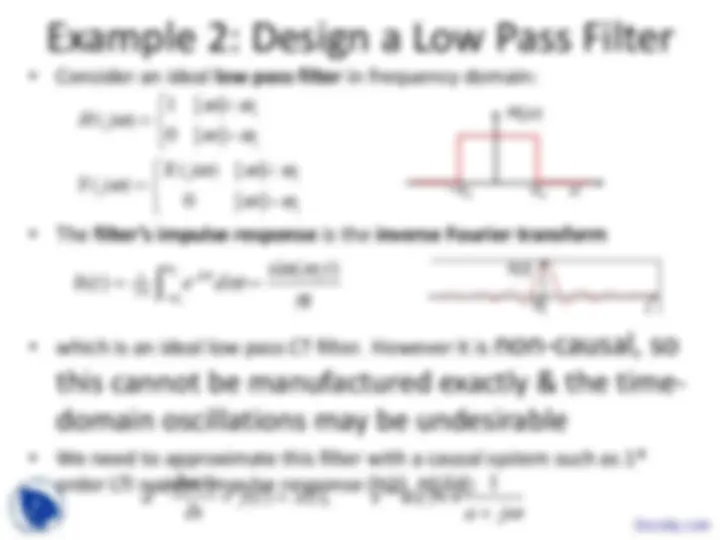
Example 2: Design a Low Pass Filter
- Consider an ideal low pass filter in frequency domain:
- The filter’s impulse response is the inverse Fourier transform
• which is an ideal low pass CT filter. However it is non-causal, so
this cannot be manufactured exactly & the time-
domain oscillations may be undesirable
- We need to approximate this filter with a causal system such as 1 st
order LTI system impulse response { h ( t ), H ( j ω)}:
h ( t ) (^0) t
1 | | ( ) 0 | | ( ) | | ( ) 0 | |
c c c c
H j
X j Y j
ω ω ω ω ω ω ω ω ω ω ω
< = > < = >^ ω
H ( j ω)
−ω c ω c
t
t
h t ej td c
c c π
ω ω
ω ω
ω π
sin( )
a^1 y t ( )^ y t ( ) x t ( ), e atu t ( ) F^1 t a j ω
− ∂^ + = − ↔
∂ + Docsity.com
Lecture 11: Summary
- The Fourier transform is widely used for designing filters. You can design systems with reject high frequency noise and just retain the low frequency components. This is natural to describe in the frequency domain.
- Important properties of the Fourier transform are:
- Linearity and time shifts
- Differentiation
- Convolution
- Some operations are simplified in the frequency domain, but there are a number of signals for which the Fourier transform does not exist
- this leads naturally onto Laplace transforms. Similar properties hold for Laplace transforms & the Laplace transform is widely used in engineering analysis.
( ) ( ) j ω X j ω dt
dx t F ↔
y ( t ) h ( t )* x ( t ) Y ( j ω ) H ( j ω) X ( j ω )
F = ↔ =
ax ( t ) by ( t ) aX ( j ω ) bY ( j ω )
F
Lecture 12: Tutorial
• This will be combined with the Laplace
Tutorial L
Appendix: Proof of Convolution
Property
• Taking Fourier transforms gives:
• Interchanging the order of integration, we have
• By the time shift property, the bracketed term is
e - j^ ωτ H ( j ω), so
∞ − ∞ y ( t )= x (τ ) h ( t −τ) d τ
∞
−∞
∞ −
Y ( j ω )= ^ x (τ) h ( t −τ) d τ e j^ ω tdt
∞
−∞
∞ −
Y ( j ω)= x (τ)^ h ( t −τ ) e j ω^ tdt d τ
ω ω
ω τ τ
ω τ ω τ
ωτ
ωτ
H j X j
H j x e d
Y j x e H j d
j
j
∞
−∞
−
∞
−∞
−