Download Frequency Response - Control Systems | ME 451 and more Study notes Control Systems in PDF only on Docsity!
2009 Spring ME451 - GGZ
Page 1
Week 12-13: Frequency Response
-^
We would like to analyze a system property by applyinga^ test sinusoidal input
u (
t )^
and observing a response y(t).
-^
Steady state response
yss
( t )
(after transient dies out) of a
system to sinusoidal inputs is called
frequency
response
.
System^ System
What is Frequency Response (RF)?What is Frequency Response (RF)?
)( t y^
)( t yss
t
A t u
sin )( =
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
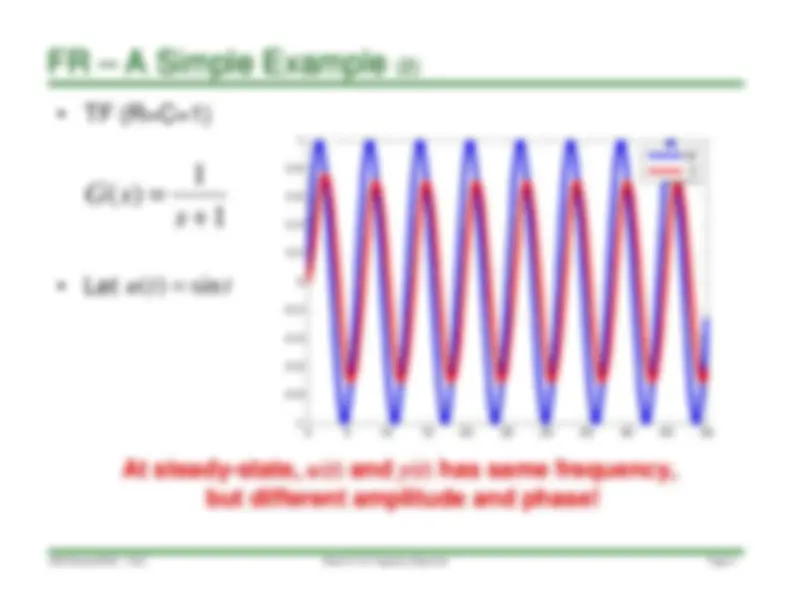
RC circuit
-^
Input a sinusoidal voltage
u (
t )
-^
What is the output voltage
y (
t )?
R^ R
C^ C
FR^ FR
A Simple ExampleA Simple Example
(1)(1)
s I sC s Y^
)( t u
(^
s I sC R s U^
)( t y
(^
=^
RCs s G
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
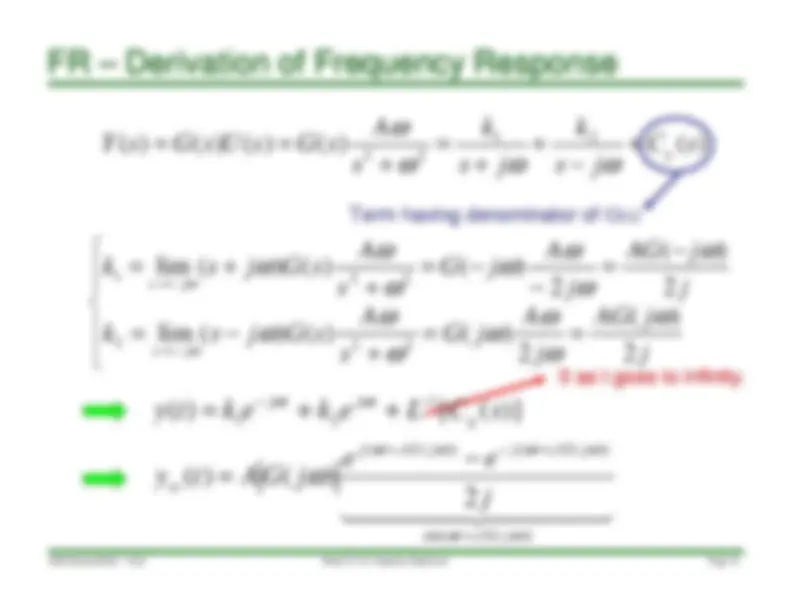
Derivation of y(t)
-^
Inverse Laplace
0 as t goes to infinity.^ 0 as t goes to infinity.
Partial fraction expansion^ Partial fraction expansion
(Derivation for general^ (Derivation for general
GG
( s )( s )
is given at the end of lecture slide.)is given at the end of lecture slide.)
A Simple ExampleA Simple Example
(3)(3)
(^
2
2
=^
s s
s
s
s s Us G s Y
(^
) t
t
e
t y^
sin
cos
1 2 )(
1
=^
−
(^
)^
sin( 2 1
sin
cos 1 2 )(
o
ss^
t
t
t
t y^
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
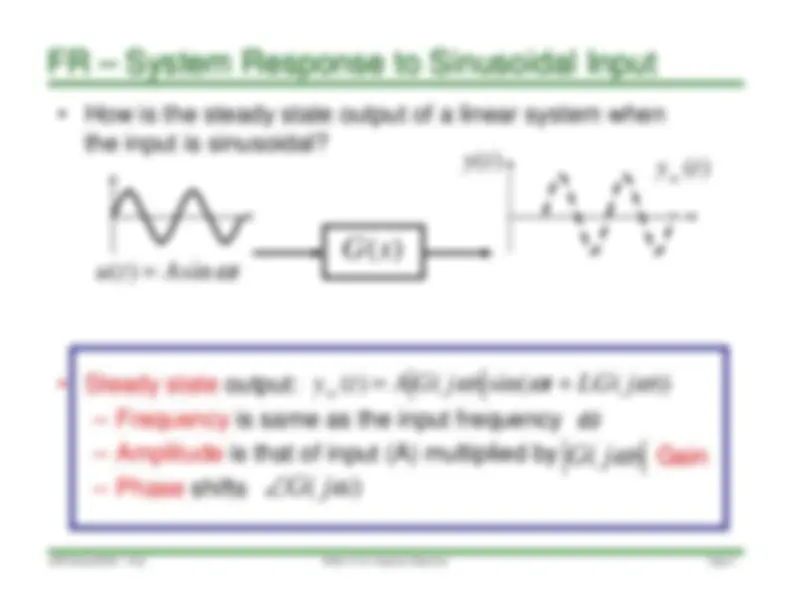
How is the steady state output of a linear system whenthe input is sinusoidal?
-^
Steady state
output:
is same as the input frequency
is that of input (A) multiplied by
shifts
Gain^ Gain
System Response to Sinusoidal InputSystem Response to Sinusoidal Input
)( t y^
)( t yss
t
A t u
sin )( =
) ( s G
sin() (
)(
ω^
j LG t
j GA
t yss
ω
ω j
G
ω j
G
2009 Spring ME451 - GGZ
Page 7
Week 12-13: Frequency Response
-^
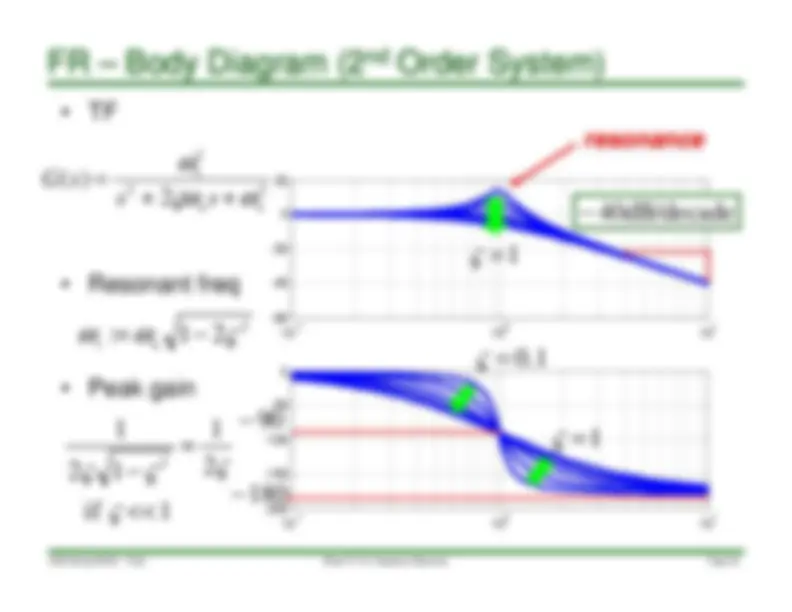
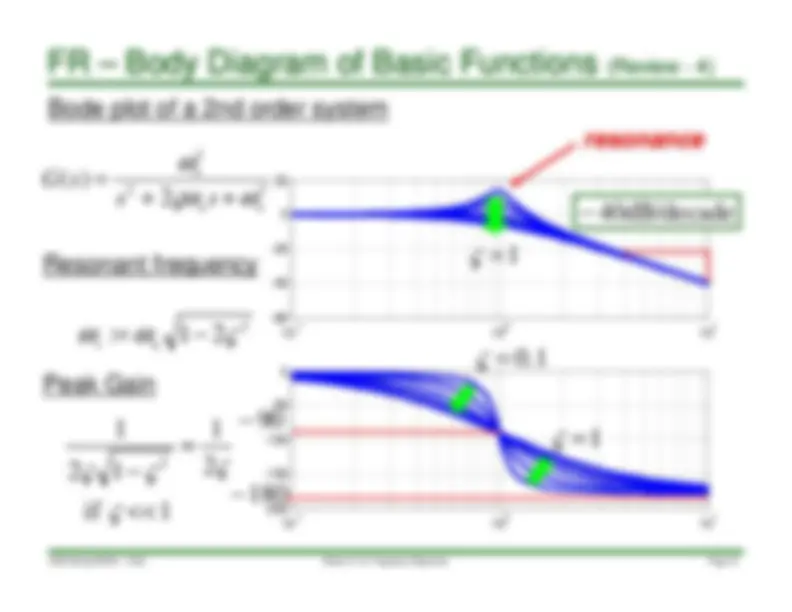
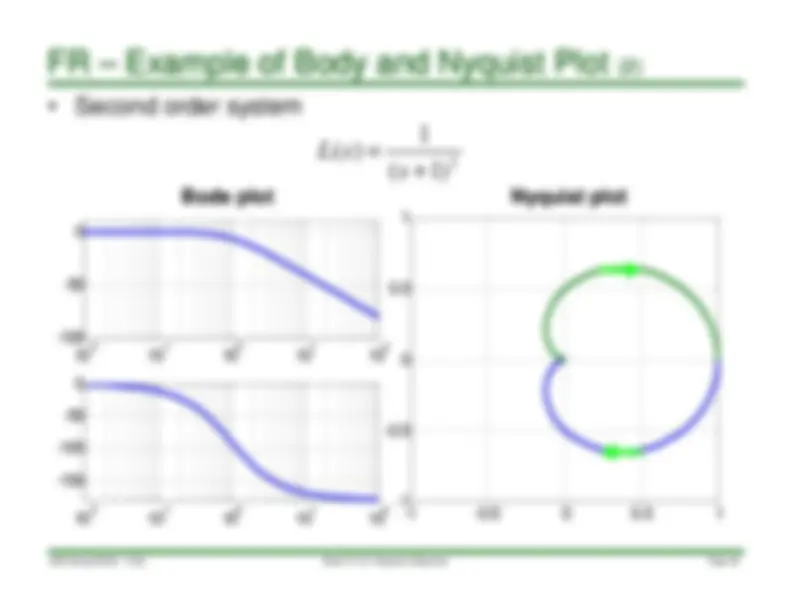
Second order system
Re Re
Im Im
(^
2
=^
s s s G
ω^
(^
2
2
j
j
j
j G^
Another FRF ExampleAnother FRF Example
−
2
1
2 2
(^2232)
tan
(^
j
j jG G
ω 3 j
2 2
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
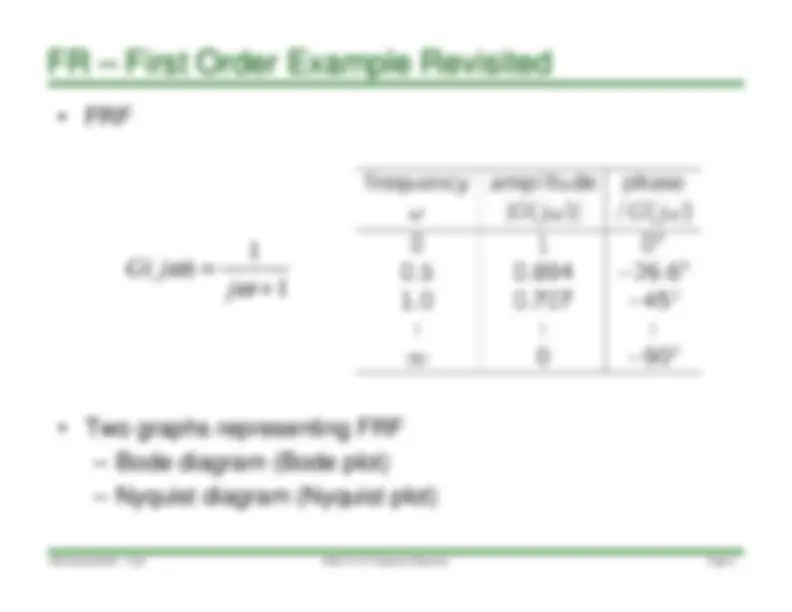
FRF
-^
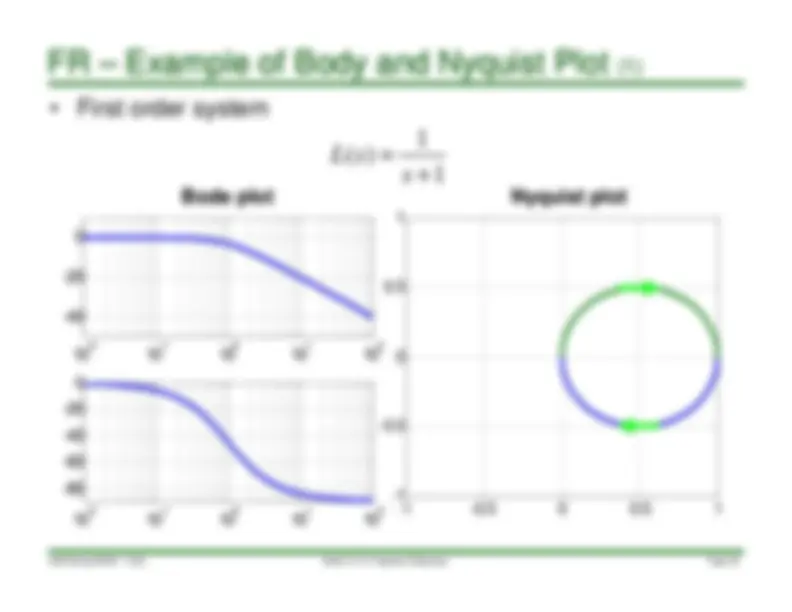
Two graphs representing FRF– Bode diagram (Bode plot)– Nyquist diagram (Nyquist plot)
First Order Example RevisitedFirst Order Example Revisited
(^
ω^
j
j G
2009 Spring ME451 - GGZ
Page 10
Week 12-13: Frequency Response
-^
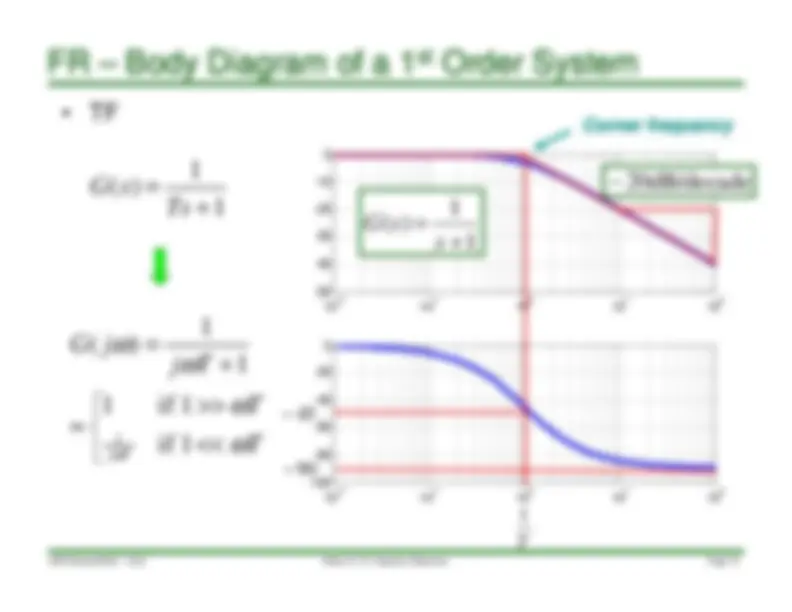
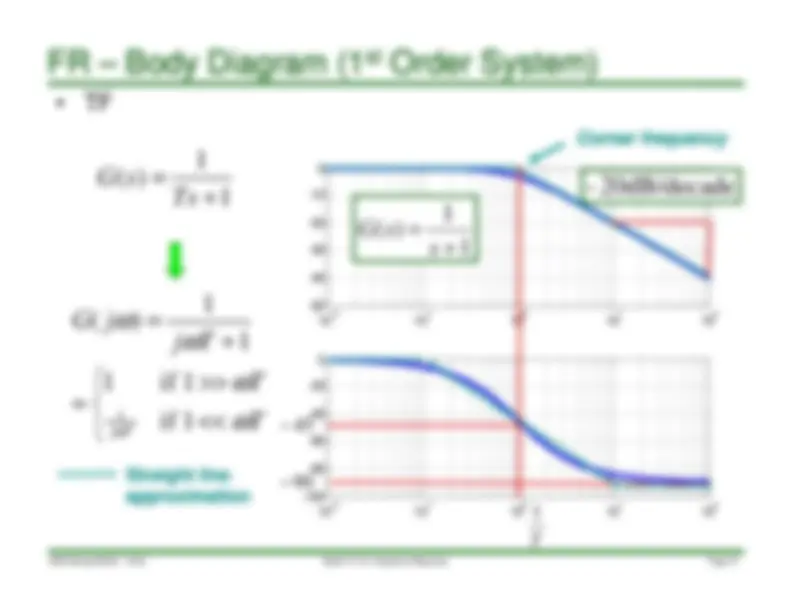
TF
-2^10
-1^10
(^0 )
(^1 )
(^210)
(^0) -10 -20 -30 -40 -50 10
-^
-1^10
(^0 )
(^1 )
(^210)
(^0) -20 -40 -60 -80 -
Corner frequency^ Corner frequency
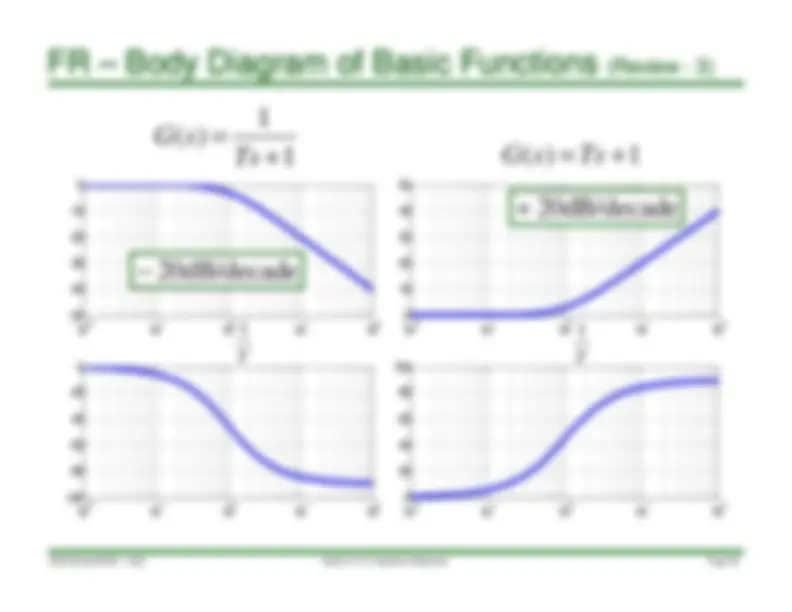
Body Diagram of a 1Body Diagram of a 1
st^ st
Order SystemOrder System
(^
=^
Ts s G
T T
T
j
j G
Tj
ω ω ω
ω^ ω^
if
if 1
1
(^1) T
(^45) − (^90) −
dB/decade (^20) −
1 1 )(
=^
s s G
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
First order system
Sketching Body DiagramSketching Body Diagram
(^
=^
s s G
(^
=^
s
s G
(^
=^
s
s G
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
Sweep frequencies of sinusoidal signals and obtain FRFdata (i.e., gain and phase).
-^
Select
G
( s )
so that
G
(jω
)^ fits the FRF data.
Agilent Technologies: FFT Dynamic Signal Analyzer
Unknown Unknownsystem^ system
Generate sin signals Generate sin signalsSweep frequencies Sweep frequencies
Collect FRF data Collect FRF dataSelect^ Select
G(sG(s
))
Body Diagram: System IdentificationBody Diagram: System Identification
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
Frequency response is a steady state response ofsystems to a sinusoidal input.
-^
For a linear system, sinusoidal input generatessinusoidal output with
same frequency
but
different
amplitude and phase
.
-^
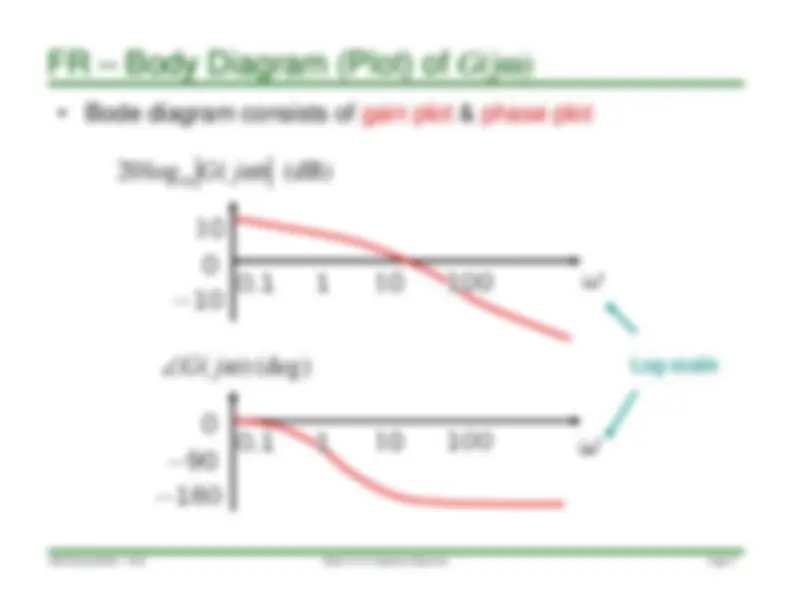
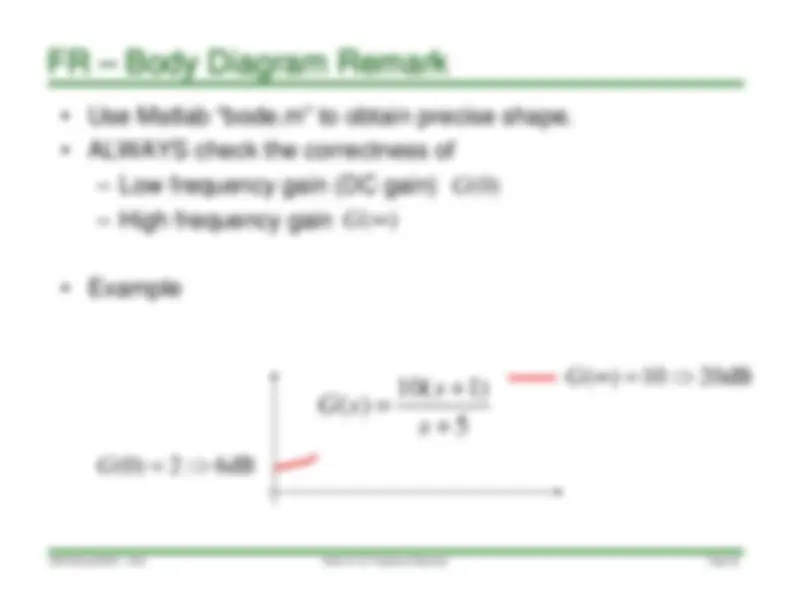
Bode plot is a graphical representation of frequencyresponse function. (“
bode.m
”)
-^
Next, Bode diagram of simple transfer functions
Body Diagram SummaryBody Diagram Summary
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
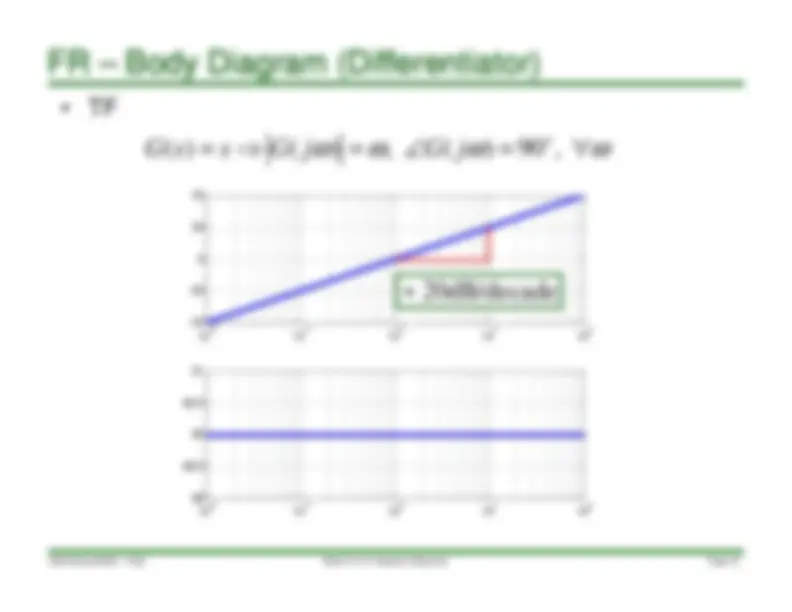
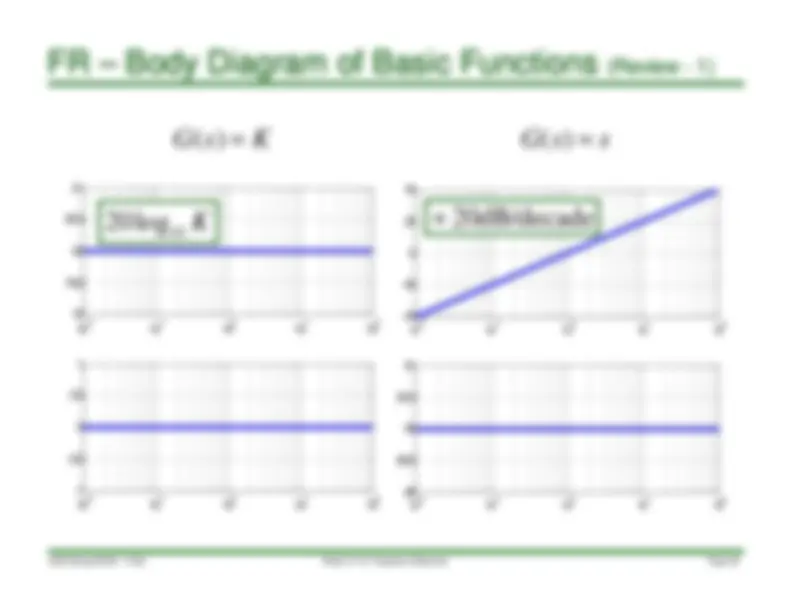
Basic functions–^
Constant gain
-^
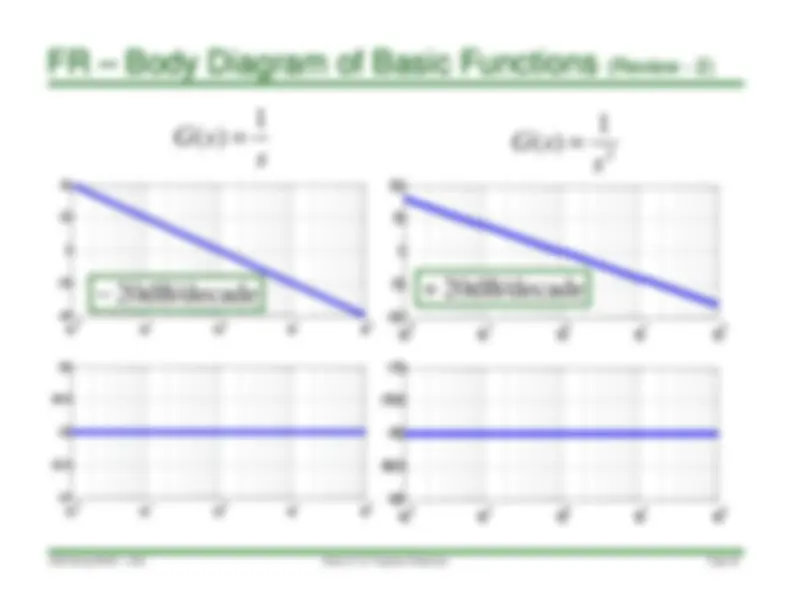
Differentiator and integrator
-^
Double integrator
-^
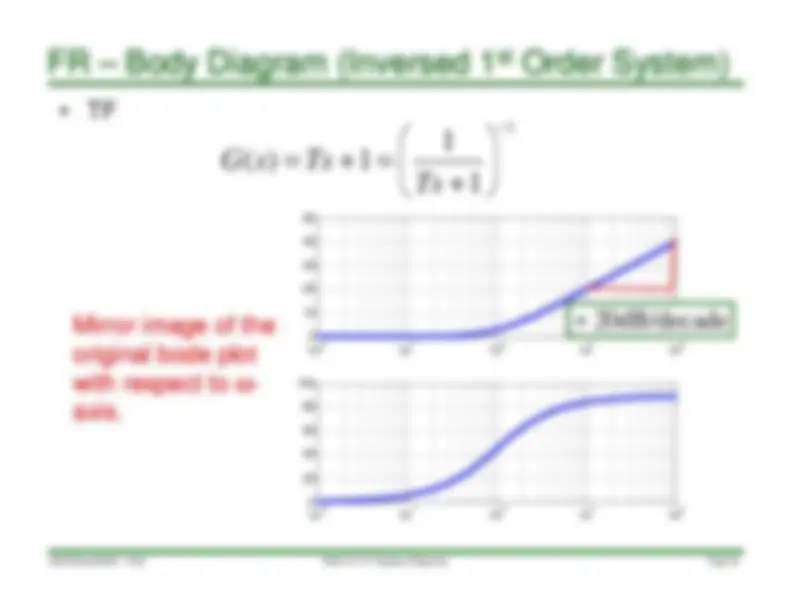
First order system and its inverse
-^
Second order system
-^
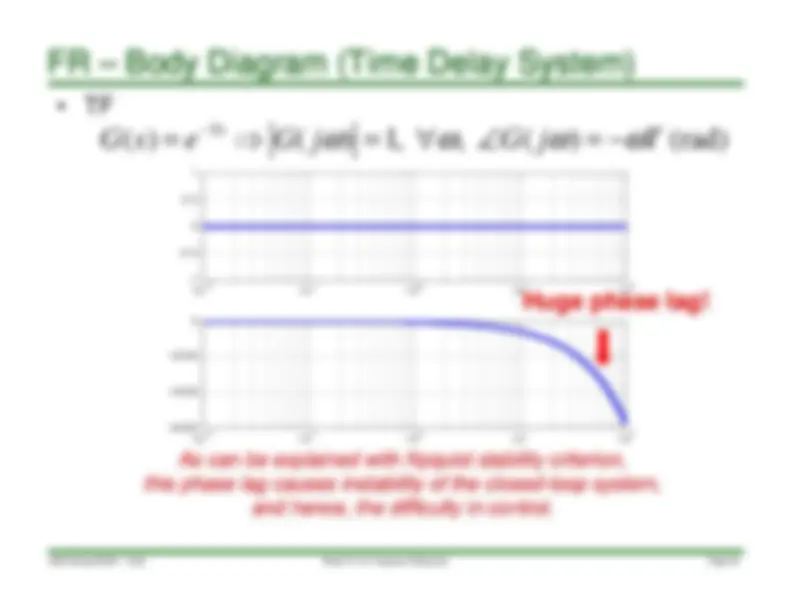
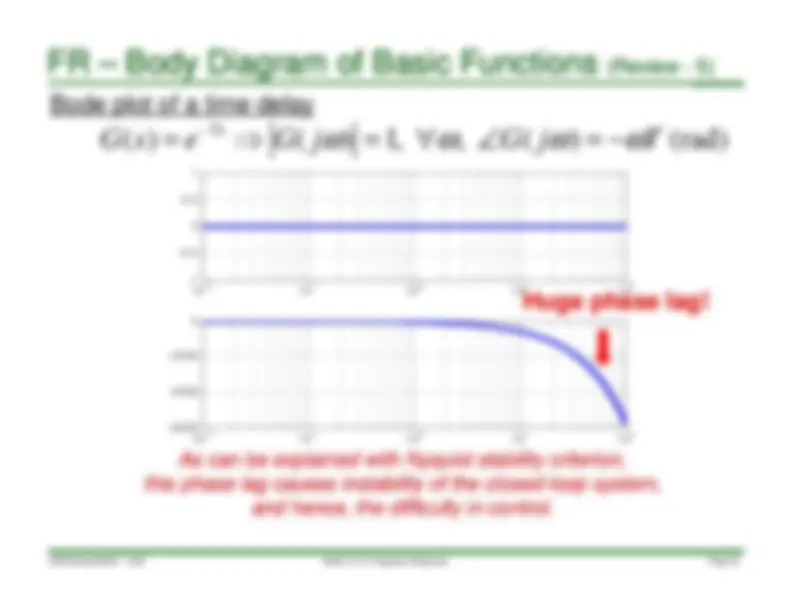
Time delay
-^
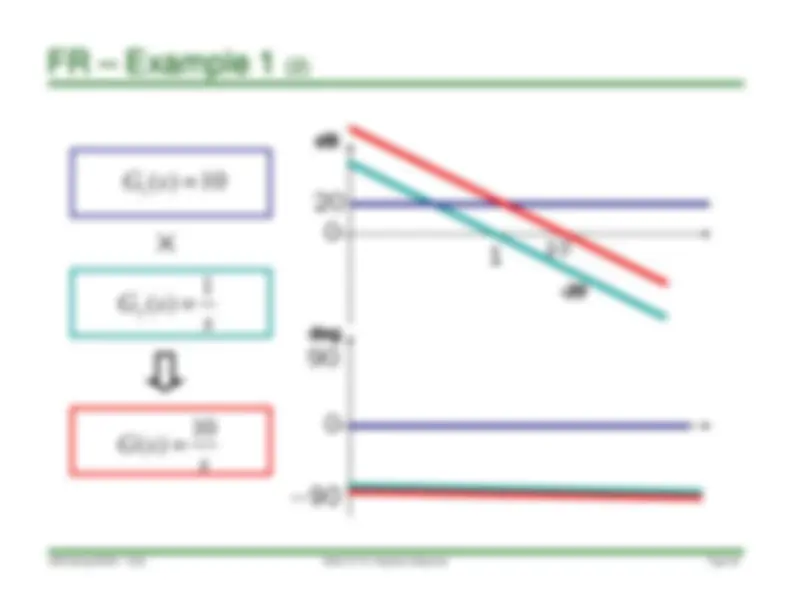
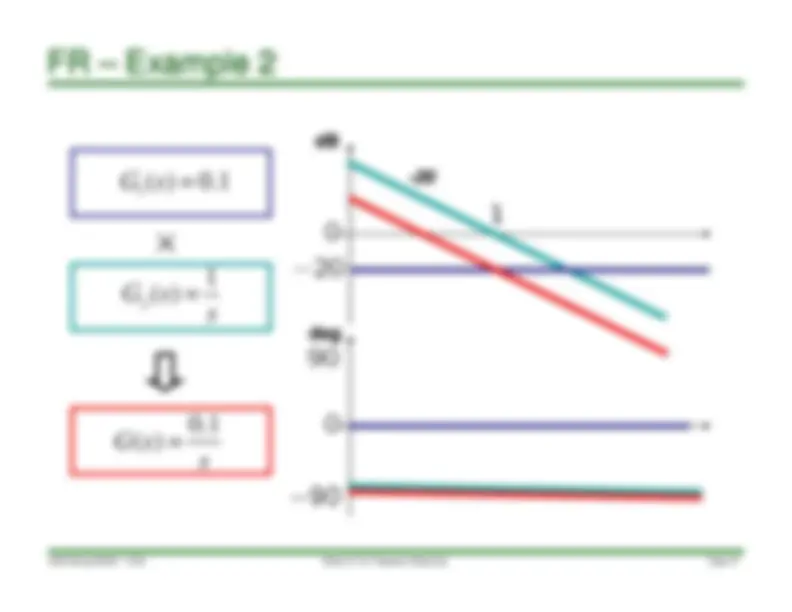
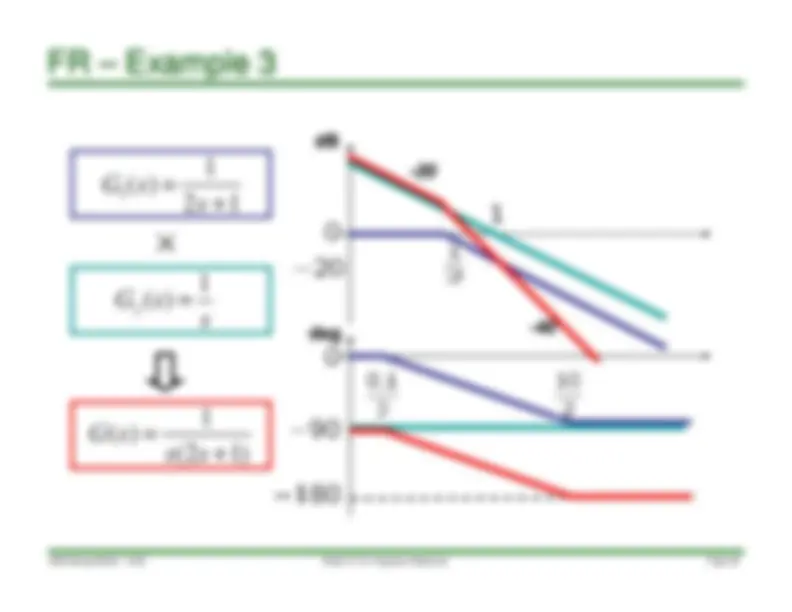
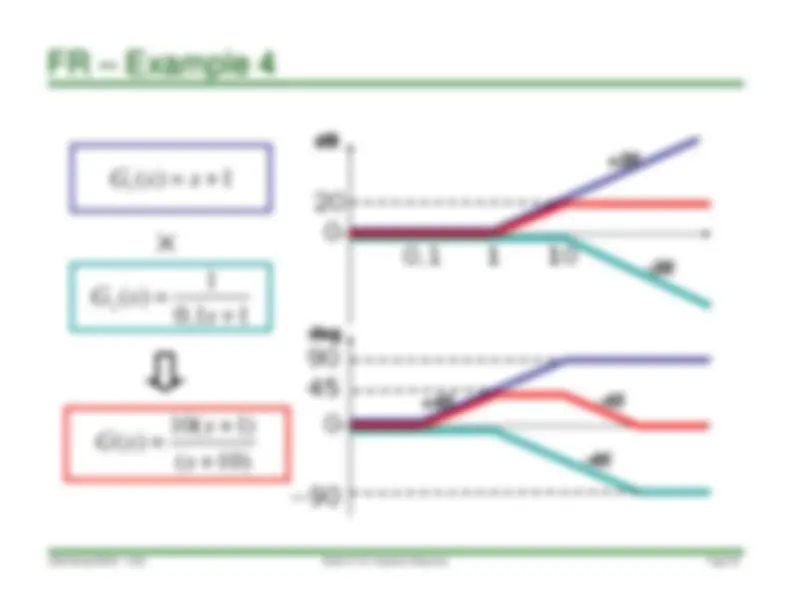
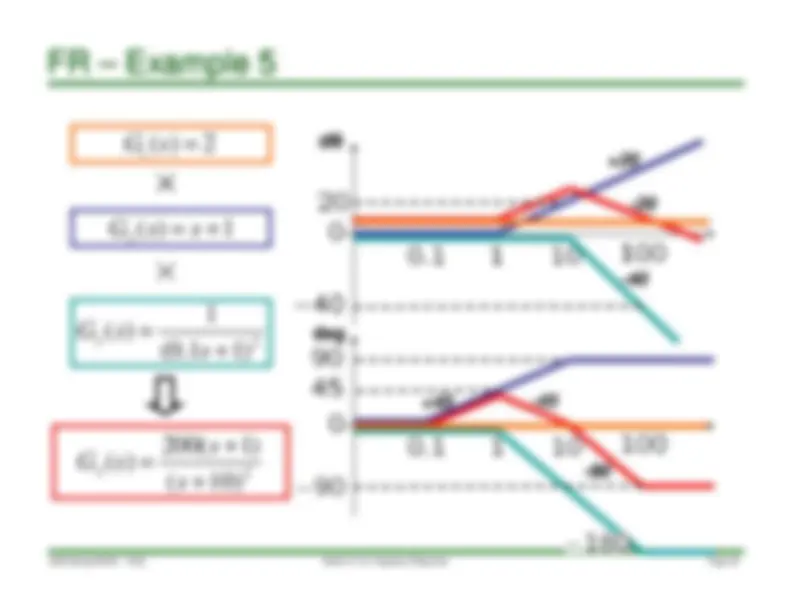
Product of basic functions1.^
Sketch Bode plot of each factor, and
2.^
Add the Bode plots graphically.
Main advantage of Bode plot!^ Main advantage of Bode plot!
Sketching Body DiagramSketching Body Diagram
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-2^10
-1^10
(^0 )
(^1 )
(^210)
(^21) 20.5 (^20) 19.5 19 -2^10
-1^10
(^0 )
(^1 )
(^210)
(^1) 0.5 (^0) -0.5 -
-^
TF
Body Diagram (Constant Gain)Body Diagram (Constant Gain)
ω^
=^
o j G K j G K s G
K
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-^
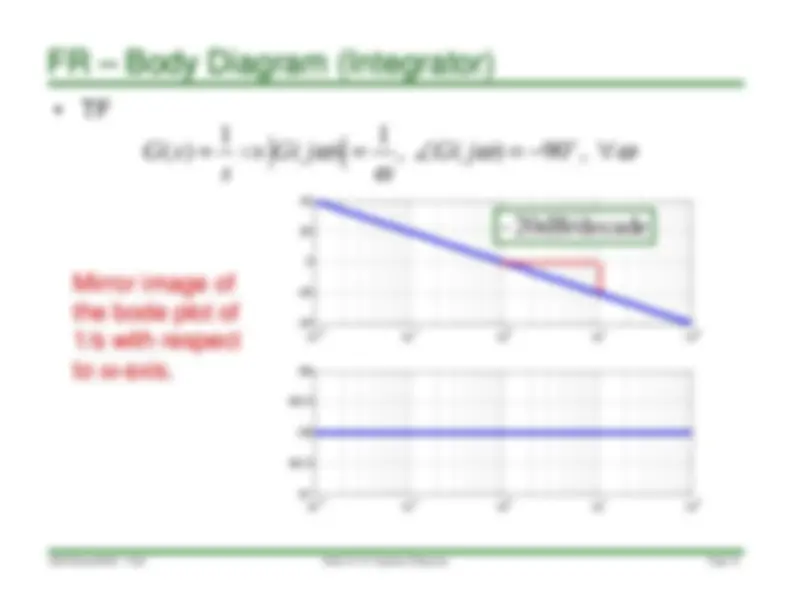
TF
-2^10
-1^10
(^0 )
(^1 )
(^210)
(^40200) -20 -40^10
-^
-1^10
(^0 )
(^1 )
(^210)
-89 -89.5 -90 -90.5 -
Mirror image of^ Mirror image ofthe bode plot of^ the bode plot of1/s with respect^ 1/s with respect^ toto^
ωω--
axis.axis.
ω^
=^
(^
o j G j G s s G
e
20dB/decad-
Body Diagram (Integrator)Body Diagram (Integrator)
2009 Spring ME451 - GGZ
Week 12-13: Frequency Response
-2 10
-1 10
(^010)
(^110)
(^210)
100 50 0 -50 -100^10
-1 10
(^010)
(^110)
(^210)
-179 -179.5 -180 -180.5 -
-^
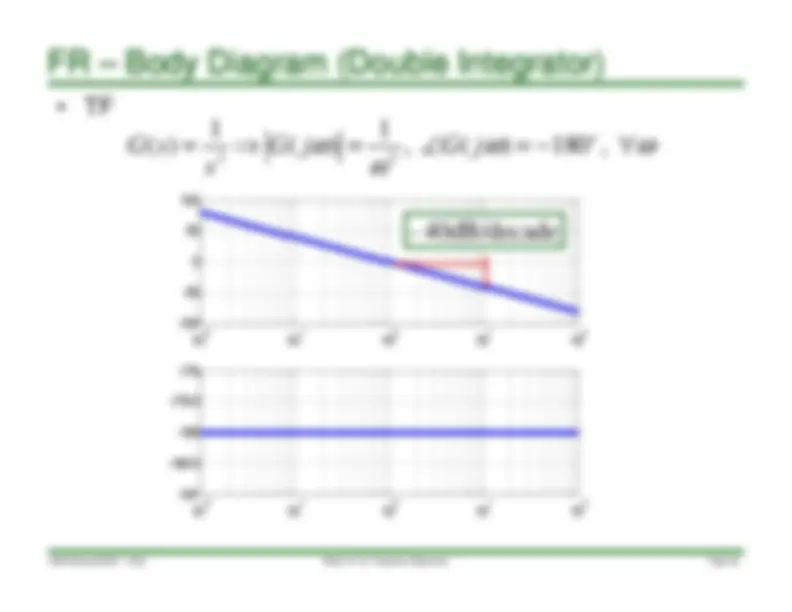
TF
Body Diagram (Double Integrator)Body Diagram (Double Integrator)
ω^
=^
(^
2
2
o j G j G s s G e
40dB/decad-