Download Bode Plot and Generalized Frequency Response - Prof. Bradley J. Bazuin and more Study notes Electrical and Electronics Engineering in PDF only on Docsity!
Chapter 8
Frequency Response Methods
Review of a simple feedback system:
R ( ) s^ α Y ( s )
_
Process
Then Y ( ) s ⋅ R ( ) s
for α larger ( α >> 1 ) Y ( ) s ≅ ⋅ R ( ) s = R ( ) s
for α small ( 1
) Y ( ) s ≅ ⋅ R ( ) s =α⋅ R ( ) s
Now consider that α and R(s) are functions of frequency … α ( jw )and R ( s = jw ).
If α varies in magnitude based on frequency, α ( jw ), the system output would either pass the
input (when α is large) or significantly attenuate the input (when α is small) based on frequency.
If we select inputs that are pure tones in frequency, we should be able to observe what α ( jw )is
at each frequency. This develops a frequency response curve … the power spectrum plot of a filter or process. The output may have both magnitude and phase components that vary in frequency.
While a spectrum analyzer will output a signals magnitude spectrum, you can use a network analyzer to plot both the magnitude and phase.
Welcome to the world of audio and radio frequencies.
Using a sine or cosine waveform as an input.
Laplace Transform Notes:
r^ ( ) t^ = A ⋅sin(^ wt ) Laplace transform ( )^2
s w
w R s A
r ( ) t = A ⋅cos( wt ) Laplace transform ( ) 2
s w
s R s A
s w
s R s A
Laplace transform ( ) ⎟⎟
α w
wt a w
w r t A sin tan
2 2
Using a generalized transfer function relationship …
y ( ) t = h ( ) t ∗ r ( ) t = h ( ) t ∗( A ⋅sin( wt ))
( ) s^2 w^2
w A s
Ns Y s Ts Rs K
1 2 s w
w s p s p s p
s z s z s z Ys A K N
N
L
L
2
2 1
1 s w
s s p
k s p
k s p
k Ys N
N
K
= 1 ⋅ −^1 + 2 ⋅ −^2 + + ⋅ − + −^122
s w
s y t k e p^ t k e pt kN e pNt L
K
For large t ( ) ⎭
arg =^ −^122 s w
s y tl e L
( ) ⎭
arg =^ −^1 ⋅ 2 2 2 2 s w
w s w w
s y tl e L
( ) ( ) ( wt ) w
y tl arg e = ⋅cos wt + ⋅sin
Computing the frequency response of a system
From the previous derivation, the transfer function of the sine wave will result in a phase-shifted sine wave with a new magnitude (i.e. gain and phase changes). If this is true, then when we go back to the transfer function at the oscillation frequency:
( ) ( ) ( ) ( ) (^ ) 2 2
s w
w Y s Ts Rs KGain w ej w
= ⋅ = ⋅ θ ⋅
or
T ( jw ) KGain ( jw ) ej (^ jw )
R jw
Y s θ = = ⋅
Therefore, T ( jw ) = KGain ( jw ) ⋅ ej θ(^ jw )^ = R ( w ) + j ⋅ X ( w )
or ( ) ( ) ( ) ( ) ( ) (^ )^ ( ) ⎥
Rw T jw Rw j X w Rw^2 X w^2 exp j a tan X w
This relationship describes the gain and phase changes to an input sine wave due to the system at different frequencies.
For the frequency response of the system, we equate s with jw (s=jw) and evaluate the result!
The frequency response (in jw) is plotted as a gain and a magnitude using a Bode Plot.
Network Analyzers
From: Agilent, Network, Spectrum, and Impedance Evaluation of Electronic Circuits and Components, Application Note 1308-1.
Example simple RC (0 source and infinite load impedance testing):
( ) ( ) sRC
R sC
sC Z s Z s
Z s Ts V s
V s
1 2
2 1
2
( j a ( wRC ))
jwRC wRC
T jw V jw
V jw exp tan 1
1 2
num=1;den=[1 1];freqs(num,den);
Notice: (1) The magnitude is flat until it gets near the critical “frequency” of the pole and then drops off linearly (at 10 dB per decade). (2) The phase transitions from 0 to –90 degrees with - degrees at the critical frequency.
Generalized Frequency Response and the Bode Plot
( ) T ( jw ) ( T ( jw ))
w
s w
s p
s s
z
s
T s K N
n (^) n n
n
M
m (^) m
R
Q
i (^) i = ⋅ ∠
∏ ∏
∏
= =
= exp
1 1 2
1
2
1
1
T ( jw ) ( T ( jw ))
w
jw w
jw p
jw jw
z
jw
T jw K N
n (^) n n
n
M
m (^) m
R
Q
i (^) i = ⋅ ∠
∏ ∏
∏
= =
= exp
1 1 2
1
2
1
1
∏ ∏
∏
= =
=
N
n (^) n
n n
M
m (^) m
R
Q
i (^) i
w
s w
w p
w w
z
w
T jw K
1
2 2 2
1
2
1
2
∠ =∠ +∑ ∠ + ∑ ∑ = = =
2
1 1 1
n n
n
N
m n
M
i m
Q
i w
s w
s p
s R jw z
s T jw K
Signal level description in decibels (dB):
A measure of signal power gain defined as (^) ⎟⎟ ⎠
in
out P
P
Gain indB 10 log 10
Equivalently for voltages (^) ⎟⎟ ⎠
in
out V
V
Gain indB 20 log 10
For power defined as
out
out out (^) R
V
P
2 = and
in
in in (^) R
V
P
2
The power and voltage equations have the same result when Rout = Rin
In most RF and audio system, this is always case and part of component designs.
For the phase angle relationship
( ) T ( jw ) ( T ( jw ))
w
s w
s p
s s
z
s
T s K N
n (^) n n
n
M
m (^) m
R
Q
i (^) i = ⋅ ∠
∏ ∏
∏
= =
= exp
1 1 2
1
2
1
1
∠ =∠ +∑ ∠ + ∑ ∑ = = =
2
1 1 1
n n
n
N
m n
M
i m
Q
i w
s w
s p
s R jw z
s T jw K
using ( ) ⎟
a
b a j b a tan
Simplifies to
( ) (^) ∑ ∑ ∑ = = = ⎟
N
n
n
n
n M
m (^) m
Q
i (^) i w
w
w
w
a p
w R a z
w T jw K a 1
2 1 1 1
tan tan 2
tan
Note 9
th
ed., fix Eq. 8.28, p. 416 in the textbook It is wrong!!!!
Note 10
th
ed., fix Eq. 8.28, p. 442 in the textbook It is wrong!!!!
The 11
th
ed. finally got it right!
For magnitude and phase, each pole and zero has a contribution. In addition, there will be a distinct change in the “curve with respect to frequency” at and around the values.
Summary:
Contributions based on terms Magnitude and Phase angle
K constant: LogMag ( dB ) = 20 ⋅log 10 ( K ) and ∠= 0
Zeros (^) ⎟ ⎠
zi
1 s : ( )
2 20 log 10 1 z i
w LogMag dB and (^) ⎟⎟ ⎠
z i
w a tan
2 10 log 10 1 z i
w LogMagdB
Poles ⎟ ⎠
pi 1 s
2 20 log 10 1 p i
w LogMag dB and (^) ⎟⎟ ⎠
p i
w a tan
2 10 log 10 1 p i
w LogMagdB
2 nd^ Order
2 1 2
n n
n w
s w
ζ s
2 2 2 20 log 10 1 2 n
n n w
s w
w LogMagdB
and
⎟
tan
n
n
n
w
w
w
w
a
ζ
2 2 2 10 log 10 1 2 n
n n w
s w
w LogMagdB
Asymptotic Curves
General knowledge for a frequency response
From music, what is an octave? An octave is a doubling in frequency.
Using w
2 ⋅ w
- 02
20 log 10 ⎟=− ⎠
w
w LogMag
Therefore we have a factor of 6 dB per octave, which is the same as 20 dB per decade!
Making a Bode Plot (by hand)
(1) Format the transfer function, T ( ) s
(2) Identify the components: constant, zeros, terms in s R , poles, and/or 2 nd^ order poles.
(3) Construct the asymptotic gain. Start at a reasonable frequency such as w=1 (constant gain plus any resonance), draw the asymptote to the first resonance, determine the asymptote change required, draw the asymptote to the next resonance, determine the asymptote change required, and continue
(4) Construct the asymptotic phase. Start at w=1 (constant gain plus any resonance), draw the asymptote to 1/10 th^ the first resonance, determine the asymptote change required, draw the asymptote to the 10x the first resonance, determine the asymptote change required, and repeat. If there is not a factor of 100 between resonances, sketch in the transition regions and add them as you go from w=1 to infinity.
For examples of 15 typical transfer functions, see Table 8.5, (9th^ ed. p. 448-450 or 10 th^ ed. p. 474-476 or 11 th^ ed. p. 543-545).
For the phase sketch in the asymptotes and add them as you go
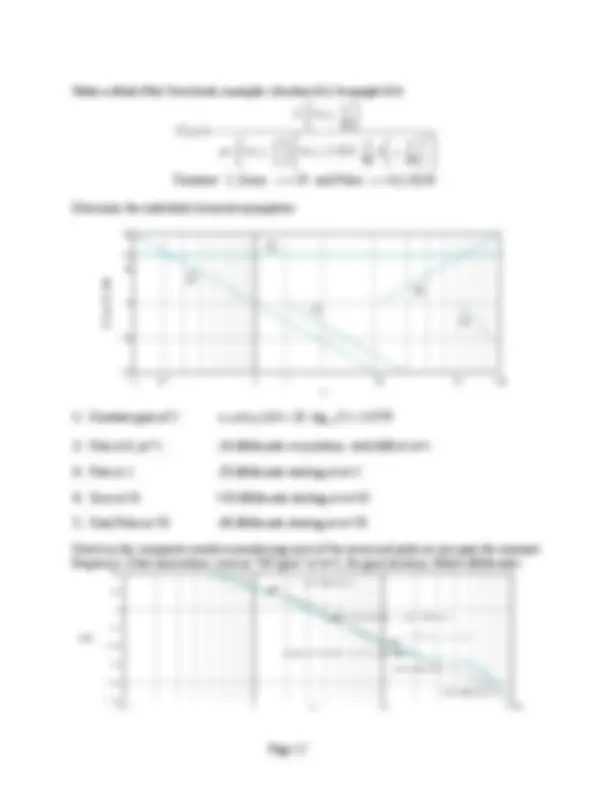
w j
w j
w jw j
w j T jw
Zeros: w = 10 and Poles: w = 0 , 2 , 50 , 50
Constant gain of 5: no phase
Pole at 0, jw^1: -90 deg. at all freq.
Pole at 2: 0 to -90 starting at 0.2 and going to 20 (-45 at 2)
Zero at 10: 0 to +90 starting at 1.0 and going to 100 (+45 at 10)
Dual Poles at 50: 0 to -180 starting at 5.0 and going to 500 (-90 at 2) For Dr. Bazuin, do not mess with the damping factor shape, use a straight line!
Sketch in the composite results remembering each of the zeros and poles as you pass the 0.1 x resonant frequency. (Start at w=1 for gain location, follow dB/decade)
MATLAB Bode Plots:
Use freqs if you have the numerator ( num ) and denominator ( den ). If you want to derive the numerator and denominator of a transfer function use [sysnum,sysden]=tfdata(sys,’v’).
Use bode if you have a transfer function ( sys=tf(num,den) ).
The actual Bode plot is:
0
50
Magnitude (dB)
10 -1^100 101 102
Phase (deg)
Bode Diagram
Frequency (rad/sec)
Matlab:
num=5*[1/10 1]; den1=conv([1 0],[1/2 1]); den2=([(1/50)^2 (0.6/50) 1]); den=conv(den1,den2);
sys=tf(num,den) [sysnum,sysden]=tfdata(sys,'v')
figure(1) bode(sys) grid
figure(2) freqs(num,den)
Transfer function: 0.5 s + 5
0.0002 s^4 + 0.0064 s^3 + 0.512 s^2 + s
sysnum = 0 0 0 0.5000 5. sysden = 0.0002 0.0064 0.5120 1.0000 0
% % Alternate Mothodology % Longer with more detailed information % wref=logspace(-1,3,1000)';
% Using Bode with the system [magii,phaseii]=bode(sys,wref); magw=squeeze(magii); phasew=squeeze(phaseii); magwdB=20*log10(magw);
% Using freqs with the num and den hii = freqs(num,den,wref); phaseh=(180/pi)angle(hii); maghdB=10log10(real(hii.*conj(hii)));
figure(4) semilogx(wref,magwdB) title('Bode Plot Power') xlabel('Frequency (rad/sec)') ylabel('Magnitude (dB)'); grid
figure(5) semilogx(wref,phasew)
title('Bode Plot Phase') xlabel('Frequency (rad/sec)') ylabel('Phase (degrees)'); grid
figure(6) semilogx(wref,maghdB) title('Bode Plot Power') xlabel('Frequency (rad/sec)') ylabel('Magnitude (dB)'); grid
figure(7) semilogx(wref,phaseh)
title('Bode Plot Phase') xlabel('Frequency (rad/sec)') ylabel('Phase (degrees)'); grid
% Unwrapping phase (no longer modulo 180) figure(8) semilogx(wref,unwrap(phaseh))
title('Bode Plot Phase') xlabel('Frequency (rad/sec)') ylabel('Phase (degrees)'); grid
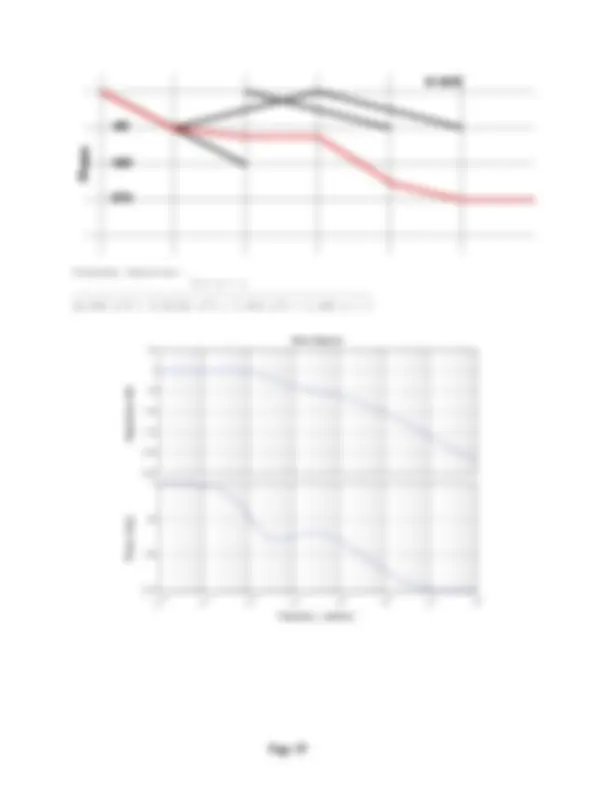
10 -1^100 101 102
0
20
40 Bode Plot Power
Frequency (rad/sec)
Magnitude (dB)
10 -1^100 101 102
-80 Bode Plot Phase
Frequency (rad/sec)
Phase (degrees)
bode Mag bode Phase
10 -1^100 101 102
0
20
40 Bode Plot Power
Frequency (rad/sec)
Magnitude (dB)
10 -1^100 101 102
0
50
100
150
200 Bode Plot Phase
Frequency (rad/sec)
Phase (degrees)
freqs Mag freqs Phase
10 -1^100 101 102
-80 Bode Plot Phase
Frequency (rad/sec)
Phase (degrees)
freqs with unwrapped phase