



Generators
Docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These main points are discussed in these Lecture Slides : Generators, Phase Space, Contact Transformation, Hamiltonian, Harmonic Oscillator, Contact Transformation, Associated Momenta, Generator, Harmonic Oscillator, Simple Hamiltonian
Typology: Slides
1 / 9

This page cannot be seen from the preview
Don't miss anything!
dt H H
qd p
dq p^
k k j j^
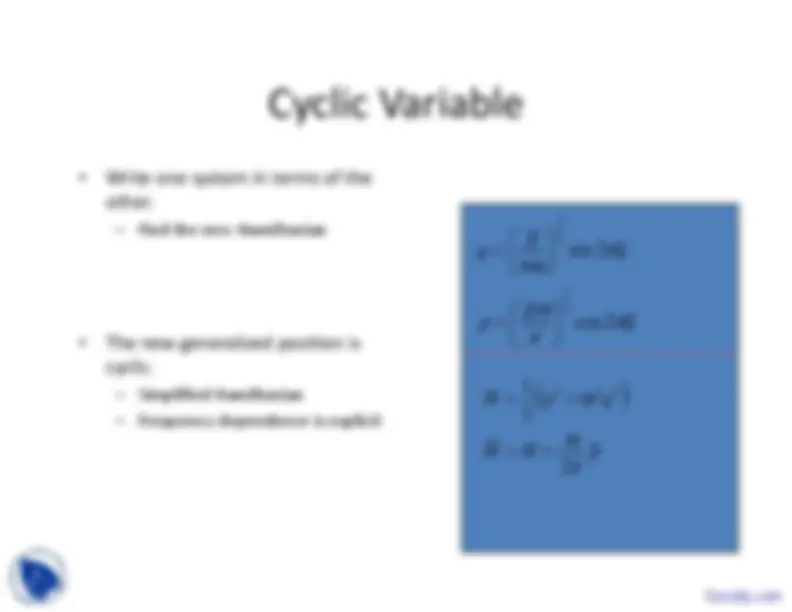
Write
one
system
in
terms
of
the
other.^ –
Find
the
new
Hamiltonian
The
new
generalized
position
is
cyclic.^ –
Simplified
Hamiltonian
-^
Frequency
dependence
is
explicit
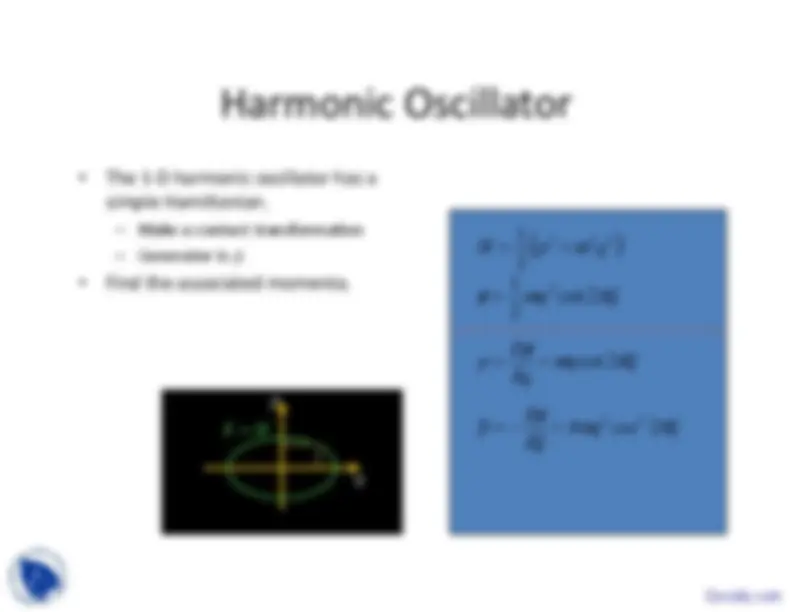
q
p
q
1 2 sin
q
p
p
1 2 cos
p
q
p
2 2 (^2)
The
equations
of
motion
follow
from
the
new
Hamiltonian
-^
Angular
momentum
and
angle
The
equations
of
motion
for
the
original
system
follow.
p^
p
q
J =
2
E/
t^0 t
q^
qd dt
H^ p
sin 2
0
2
t t
q^
t
^
cos 2
t^0 t
p^
Use
is
limited
when
new
coordinates
are
functions
of
q
but
not
p
-^
dQ
k^ not
independent
of
dq
j
Transform
the
generator
to
new
independent
variables.
-^
“type
3”
transformation
j j
k j^
q p
t q q^
^
j j j j
k k j j
dp q
dq p
d
dt H H
qd p
dq p
) ( t q p d dt H H
qd p
dp q
k j
k k j j
j
j
p
q^
k
k^
q
p^
t q q^
k j
j^
q
p^
k
k^
q
p^
j j
k j
k j^
q p t q p t q
q^
k
k^
q
p^
j
j
p
q^
j
j
p
q^
k
k
p
q^
j j j j k j k
j^
q p q p t p p t q
q^
j j k j k
j^
q p t p q t q
q^
j
j^
q
p^
k
k
p
q^
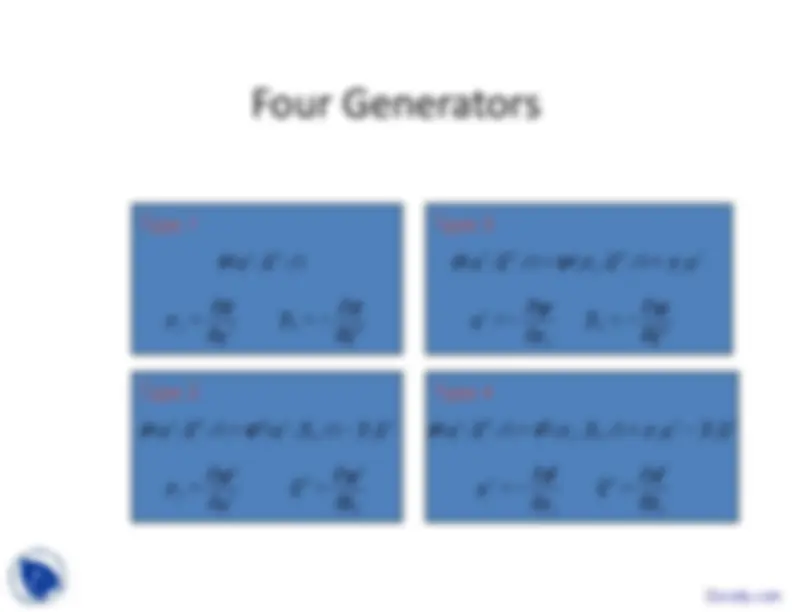
Type 1 Type 2
Type 3 Type 4
Docsity.com