Download Understanding Google's PageRank Algorithm through Eigenvectors and Determinants and more Slides Engineering Mathematics in PDF only on Docsity!
Google and eigenvectors
Last week
Operation Effect on the determinant
Transpose No change
Exchange two rows/columns Change the sign of determinant Multiply a row/column by a constant k
multiply the determinant by k
Add a constant multiple of a row/column to another row/column
no change
The followings are equivalent
( A is an nxn matrix)
- There is a nonzero solution to A x = 0.
- The columns of A are linearly dependent.
- The rows of A are linearly dependent.
- det( A ) = 0.
- The inverse of A does not exist.
GOOGLE’S PAGERANK ALGORITHM
The Pagerank algorithm
- Larry Page and Sergey Brin, the founders of Google, invented the pagerank algorithm for ranking webpages.
- Ideas: the importance of a page is high if
- it is linked from many other places.
- it is linked from a page which is known to be important.
- The underlying mathematics of the Pagerank algorithm is the calculation of eigenvector. Pagerank algorithm
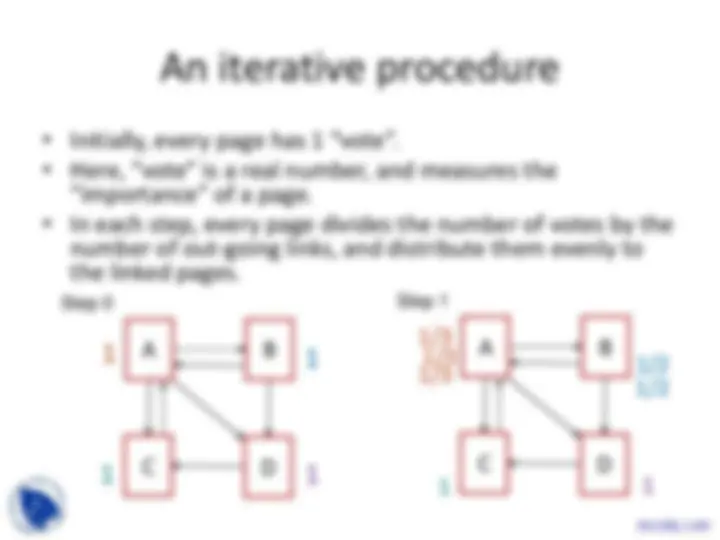
A Toy Example
- A toy example of four web sites.
- An arrow from page A to page B means that there is a link from A to B, and so on. - Page A has three out-going links - Page B has two out-going links - Page C has one out-going link - Page D has one out-going link
A B
C (^) D http://williamcotton.com/pagerank-explained-with-javascript
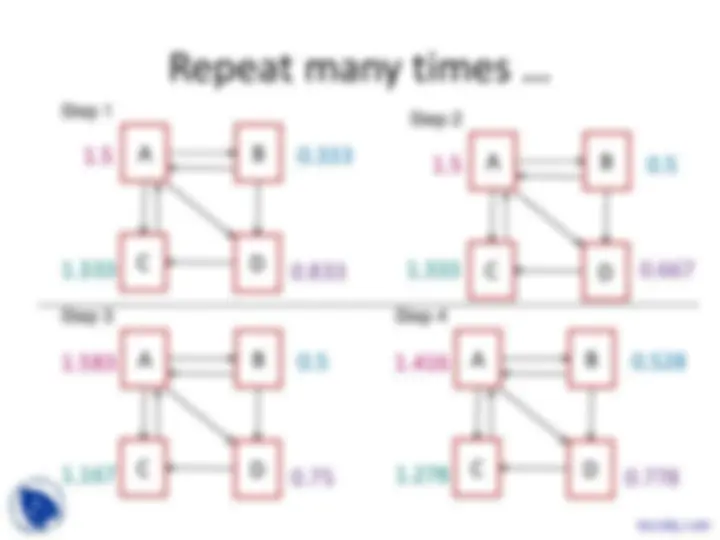
Repeat many times …
A B
C (^) D
Step 1
1.333 0.
1.5 (^) A B
C (^) D
Step 2
1.333 0.
A B
C (^) D
Step 3
1.167 0.
1.583 A^ B
C (^) D
Step 4
1.278 0.
Matrix representation
- Let the numbers associated with each page be represented by the components of a 4x vector.
- Let
A B C D A B C D
A B
C (^) D
xA xB
xC xD
If it converges, the limiting values
can be found by solving equations
where k is any real constant (^) when the sum is 4
Important Remarks
- x is a solution to ( M – I ) x = 0.
- If x is a solution, then any scalar multiple of x is also a solution. - Mx = x M (k x ) = k x for any real number k
- Mx = x has a non-zero solution, because the determinant of M – I is 0. - We can see this by noticing that the four rows of M – I sum to the zero vector. Hence, the rows are linearly dependent, which implies that det( M – I )=0.
Eigenvalue and Eigenvector
- Given a square matrix A , a non-zero vector v is called an eigenvector of A , if we an find a real number (which may equal to zero), such that
- This number is called an eigenvalue of A , corresponding to the eigenvector v.
Matrix-vector product Scalar product of a vector
Important notes
- If v is an eigenvector of A with eigenvalue , then any non-zero scalar multiple of v also satisfies the definition of eigenvector.
- The PageRank algorithm is designed so that the largest eigenvalue is =1, and the algortihm output an eigenvector corresponding to =1.
k 0
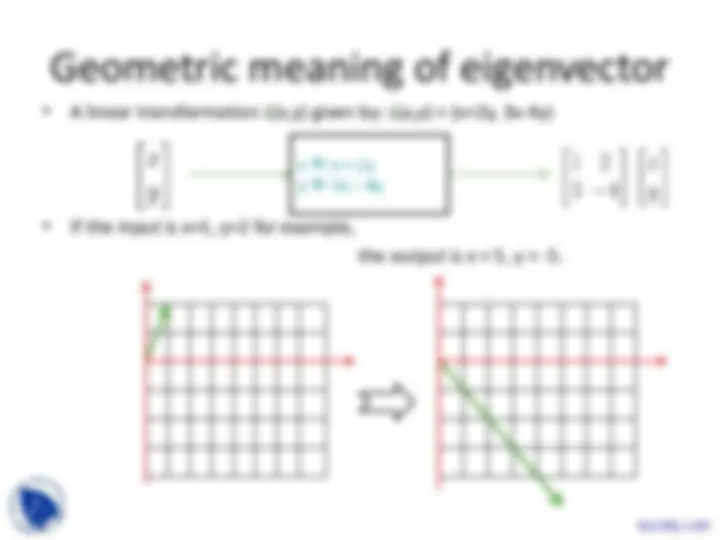
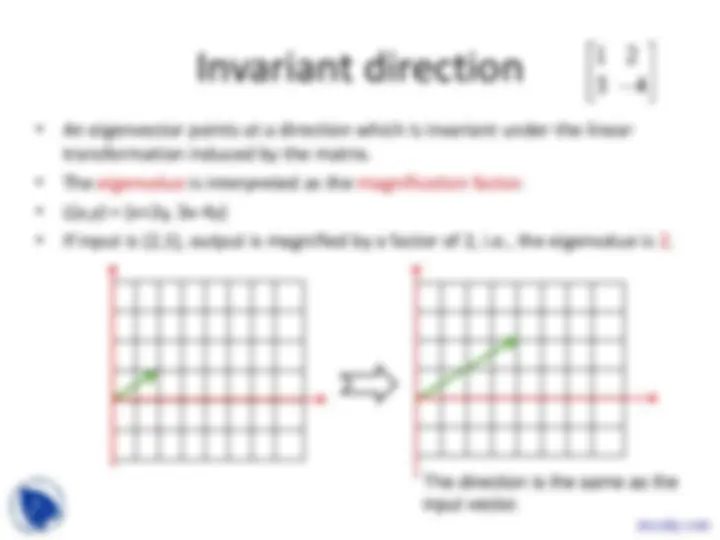
Invariant direction
- An eigenvector points at a direction which is invariant under the linear transformation induced by the matrix.
- The eigenvalue is interpreted as the magnification factor.
- L ( x,y ) = (x+2y, 3x-4y)
- If input is (2,1), output is magnified by a factor of 2, i.e., the eigenvalue is 2.
The direction is the same as the input vector.
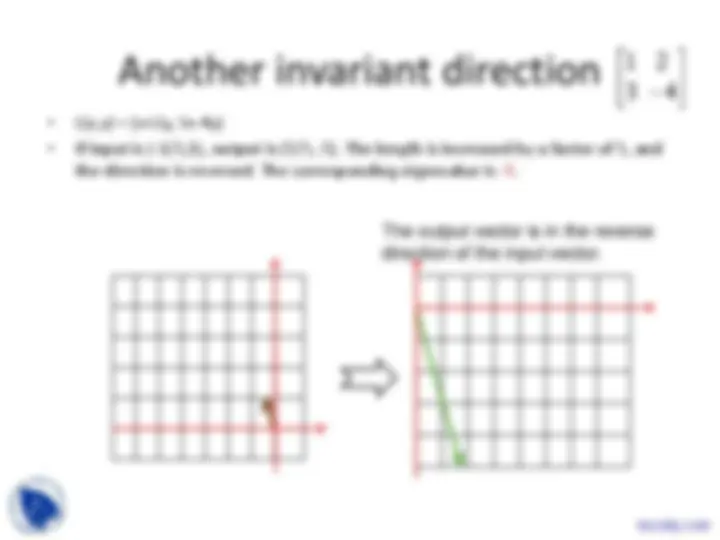
Another invariant direction
- L ( x,y ) = (x+2y, 3x-4y)
- If input is (-1/3,1), output is (5/3,-5). The length is increased by a factor of 5, and the direction is reversed. The corresponding eigenvalue is -5.
The output vector is in the reverse direction of the input vector.