


Gradient-based Methods for Optimization. Part II.
Nathan L. Gibson
Department of Mathematics
Oregon State University
OSU – AMC Seminar, Nov. 2007 – p. 1



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of optimization methods, specifically focusing on unconstrained optimization, nonlinear least squares, and the levenberg-marquardt algorithm. The parameter identification problem, update steps for various optimization methods, and the levenberg-marquardt idea. It also discusses the levenberg-marquardt algorithm from different perspectives, including its step length and the use of the armijo rule.
Typology: Study notes
1 / 33

This page cannot be seen from the preview
Don't miss anything!
Gradient-based Methods for Optimization. Part II.^ Nathan L. Gibson^ [email protected]^ Department of MathematicsOregon State University
OSU – AMC Seminar, Nov. 2007 – p. 1
′ u(0) = u; u(0) = 0^0
MAssume data {u}is given for some timesj j=^
ton thej^ interval^ [0, T^ ]. Find^ x=[c, k
T^ ]such that the following objective function is minimized:^ M∑^1 f^ (x) =^2 j=
(^2) |u(t; x) − u|.j j OSU – AMC Seminar, Nov. 2007 – p. 2
(^1) T T^2 )(x − x) + (x^ −^ x)∇f^ (x)(x^ − k k^ k^2 x)k^
-^ Gauss-Newton:GNT^ m(x) =^ f^ (x) +^ ∇f^ (x)(x^ −k^ k^ k^
1 T^ ′T^ ′ x) + (x^ −^ x)R(x)R(x)(x^ −k k^ k^ k^2 x)k^
-^ Steepest Descent:SDT^ m(x) =^ f^ (x) +^ ∇f^ (x)k^ k^ k^
11 T^ (x − x) + (x^ −^ x)^ I(x^ −^ x)k k^ k^2 λk
-^ Levenberg-Marquardt:LMT^ m(x) =^ f^ (x)+∇f^ (x)(x−xk^ k^ kk^
“^ ” 1 T ′T^ ′)+ (x−x)^ R(x)R(x) +^ νI k k^ k^ k^2 (x−x)k^ 0 =^ ∇m(x) =⇒^ Hs=^ −∇f^ (x)k^ k^ k^ k^
OSU – AMC Seminar, Nov. 2007 – p. 4
ν to take more of a SD direction. • As you get closer to minimizer, decrease
ν^ to take more of a GN step.^ •^ For zero-residual problems, GN convergesquadratically (if at all)^ •^ SD converges linearly (guaranteed)
OSU – AMC Seminar, Nov. 2007 – p. 5
to be d=^ −∇f^ (x). This defines a direction but not ak^ k step length. • We define the Steepest Descent update step to beSD s=^ λdfor some^ λkk^ kk^
-^ We would like to choose
λso that^ f^ (x)k^ decreases sufficiently. • Could ask simply that^ f^ (x)k+
< f^ (x)k^ OSU – AMC Seminar, Nov. 2007 – p. 7
f^ (x) T^ m(x) = f (x) + ∇f^ (x)(x^ −^ x).kkkk Then the^ predicted reduction
using the Steepest Descent step^ (x=^ xk+1^ k
−^ λ∇f^ (x))^ is kk pred = m(x) − m(x) =^ λ‖∇f^ (x)‖kkkk+1kk
The^ actual reduction^ in^ f
is ared = f (x)^ −^ f^ (x).kk+1^ OSU – AMC Seminar, Nov. 2007 – p. 8
(^1) (0, 1) (think ) and^ m^ ≥ 2 0 is the smallest integer such that^ ared > α pred, where^ α^ ∈^ (0,^ 1).
OSU – AMC Seminar, Nov. 2007 – p. 10
xin direction of locallyk^ decreasing f. • Armijo procedure is to start with^ m^ = 0^ thenincrement m until sufficient decrease is achieved,m (^2) i.e., λ = β= 1, β, β,... • This approach is also called “backtracking” orperforming “pullbacks”. • For each m a new function evaluation is required.^ OSU – AMC Seminar, Nov. 2007 – p. 11
mGN=^ βd where^ β^ ∈^ (0,^ 1)^ and^ m^
is the smallest non-negative integer to guarantee sufficient decrease.
OSU – AMC Seminar, Nov. 2007 – p. 13
)^ may be ill-conditioned, youshould be using Levenberg-Marquardt. • The LM direction is a descent direction. • Line search can be applied. • Can show that if ν=^ O(‖R(x)‖)^ then LMAk^ k converges quadratically for (nice) zero residualproblems.^ OSU – AMC Seminar, Nov. 2007 – p. 14
0.8^1 1.2^ 1.4^ 1.
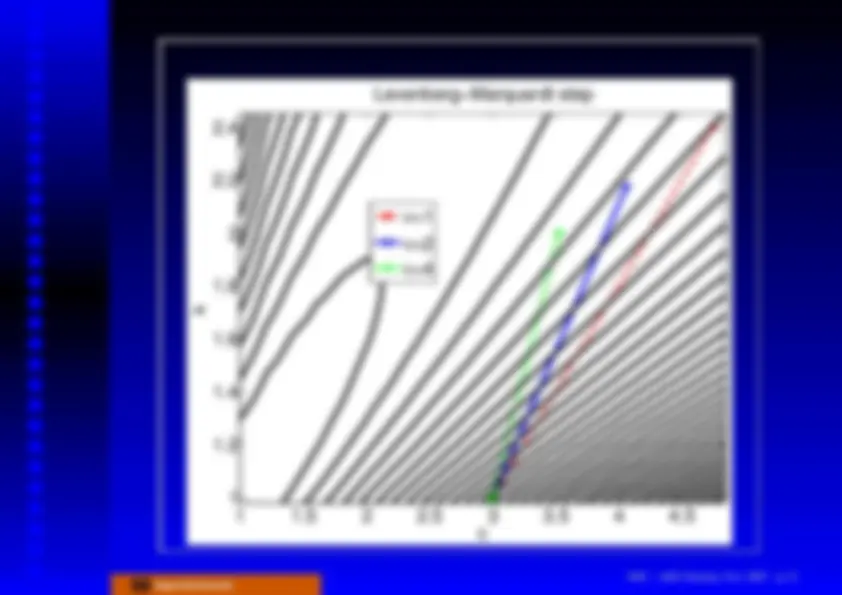
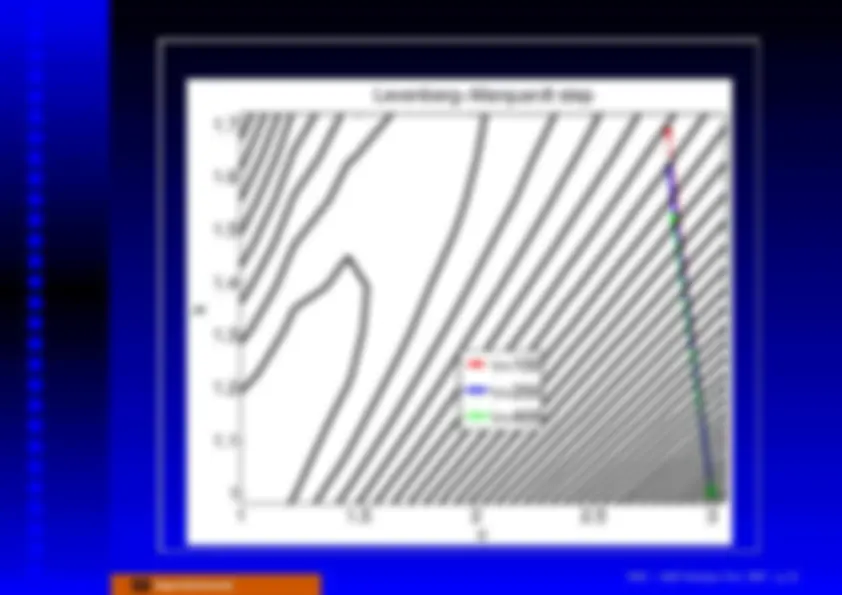
1.8^2 Search Direction 1.8 1.6 1.4 k 1.2 (^1) 0.8 0.6^ c Gauss−Newton Steepest Descent Levenberg−Marquardt^ OSU – AMC Seminar, Nov. 2007 – p. 16
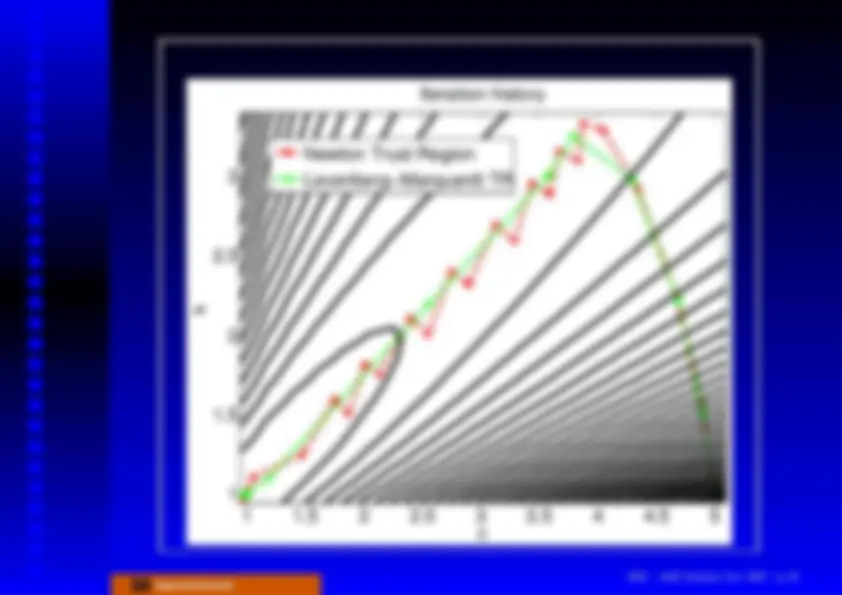
1 1.1^ 1.2^ 1.3^ 1.4^ 1.^
1.6^ 1.7^ 1. Iteration history Gauss−Newton wAR 1.7 Steepest Descent wAR Levenberg−Marquardt wAR 1.6 1.5 1.4 k 1.3 1.2 1.1 1 c OSU – AMC Seminar, Nov. 2007 – p. 17
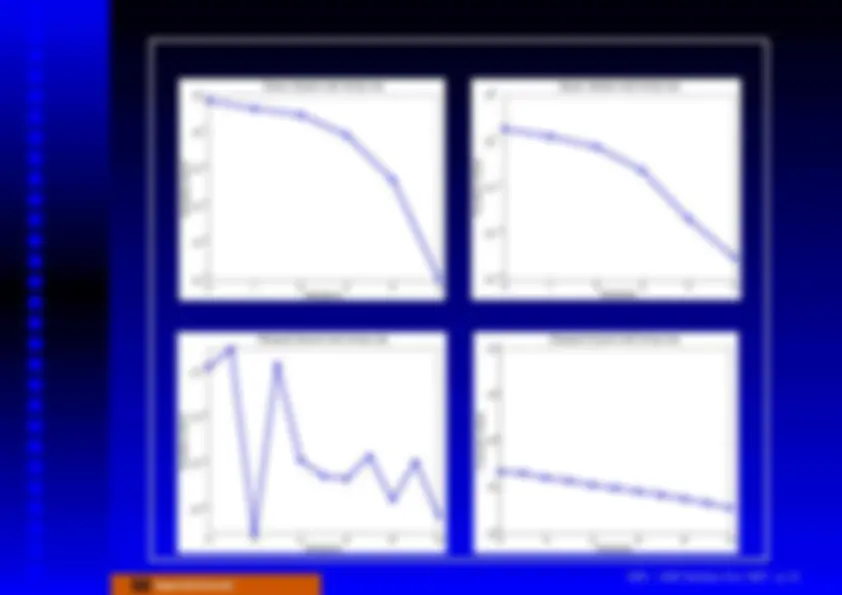
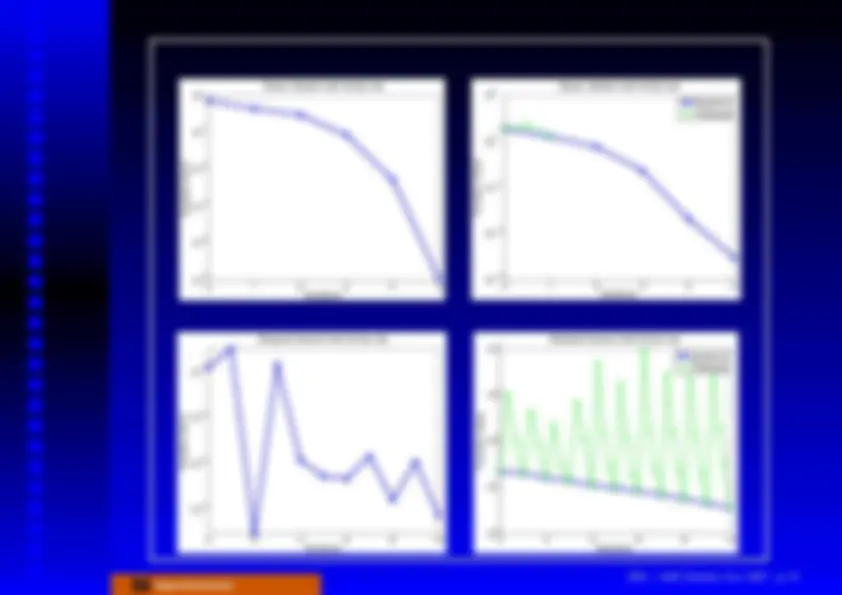
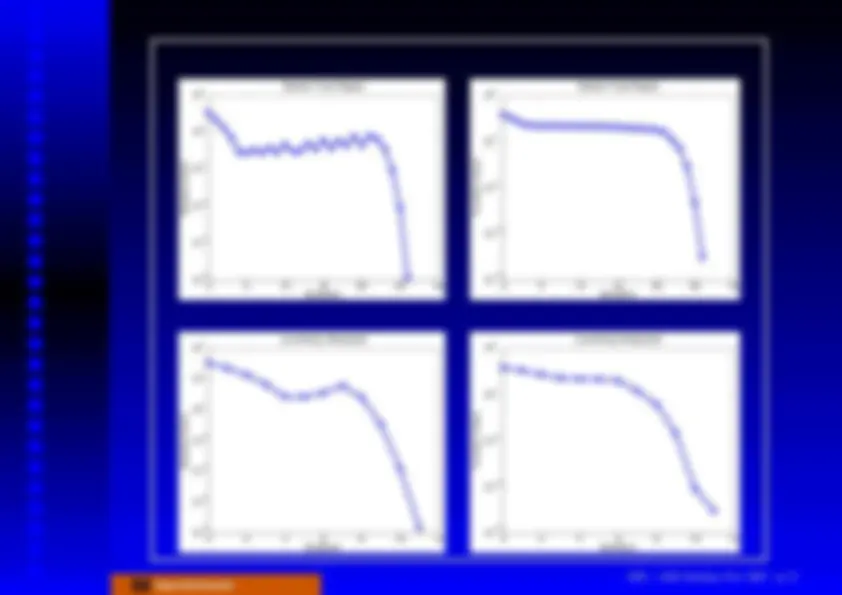
Gauss−Newton with Armijo rule 210 010 −2 10 −4 (^10) Gradient Norm−6 10 −8 100 1 2 3 4 5 Iterations
Gauss−Newton with Armijo rule 510 Iterations^ Pullbacks 010 −5 (^10) Function Value−10 10 −15 100 1 2 3 4 5 Iterations Steepest Descent with Armijo rule1.7 10 1.6 10 1.5 (^10) Gradient Norm1.4 10 0 2 4 6 8 10 Iterations
Steepest Descent with Armijo rule 410 Iterations^ Pullbacks (^310210) Function Value 110 0100 2 4 6 8 10 Iterations^ OSU – AMC Seminar, Nov. 2007 – p. 19
ν^ until a sufficient decrease criteria is satisfied is NOT a good idea(nor is it a line search). • Changing^ ν^ changes direction as well as steplength. • Increasing^ ν^ does insure your direction isdescending. • But, increasing^ ν^ too much makes your steplength small.
OSU – AMC Seminar, Nov. 2007 – p. 20