


1
CMSC 132:
Object-Oriented Programming II
Graph Implementations &
Single Source Shortest Path
Algorithm
Department of Computer Science
University of Maryland, College Park













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth analysis of various graph implementations, including adjacency matrix, adjacency list, and adjacency set/map. It also covers the single source shortest path algorithm, specifically dijkstra's algorithm, which is used to find the shortest path between nodes in a graph.
Typology: Study notes
1 / 28

This page cannot be seen from the preview
Don't miss anything!
Graph Implementation
Adjacency matrix
2D array of neighbors Adjacency list
List of neighbors Adjacency set / map
Set / map of neighbors
Affects efficiency / storage
Adjacency Matrix
Single array for entire graph Undirected graph
Only upper / lower triangle matrix needed Since n
, nj
implies nk
, nk
j
Unweighted graph
Matrix elements
boolean
Weighted graph
Matrix elements
weight
Adjacency List
For each node, store
List of neighbors / successors
Linked list Array list For weighted graph
Also store weight for each edge Undirected graph
For every edge (a, b)
Nodes a & b need to store each other as neighbor Directed graph
May also need to store list of predecessors
Adjacency Set / Map
For each node, store
Set or map of neighbors / successors For unweighted graph
Use set of neighbors For weighted graph
Use map of neighbors, w/ value = weight of edge Undirected graph
For every edge (a, b)
Nodes a & b need to store each other as neighbor For directed graph
May also need to store map of predecessors
Graph Space Requirements
2 entries (for graph with N nodes, E edges) Many empty entries for large, sparse graphs
2×E entries
2×E entries Space overhead per entry
Higher than for adjacency list
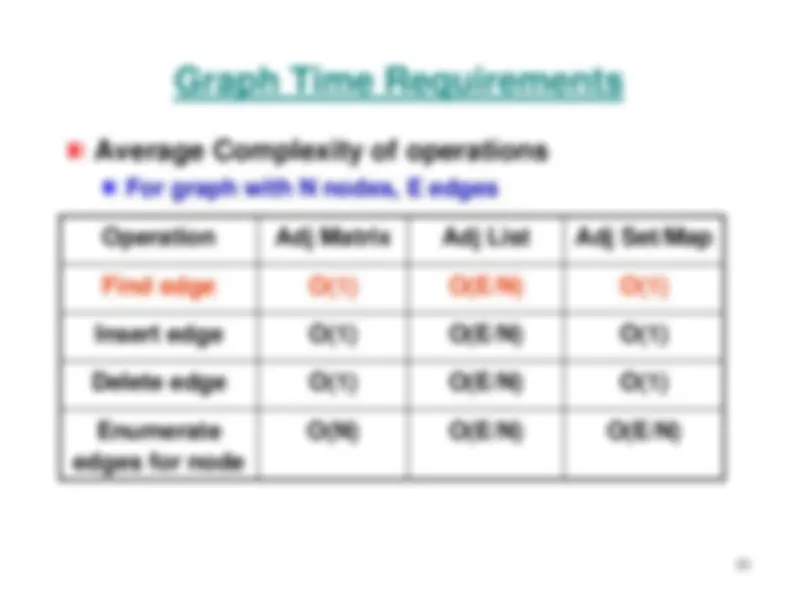
Graph Time Requirements
For graph with N nodes, E edges
Adj Set/Map
Find edge
Enumerateedges for node
Delete edge
Insert edge
Adj List
Adj Matrix
Operation
Choosing Graph Implementations Graph density
Ratio edges to nodes (dense vs. sparse)
Neighbor based
For each node X in graph
For each neighbor Y of X
// adj list faster if sparse
doWork( )
Connection based
For each node X in …
For each node Y in …if (X,Y) is an edge
// adj matrix faster if dense
doWork( )
Shortest Path – Dijkstra’s Algorithm^ Maintain
Nodes with known shortest path from start
Cost of shortest path to node K from start
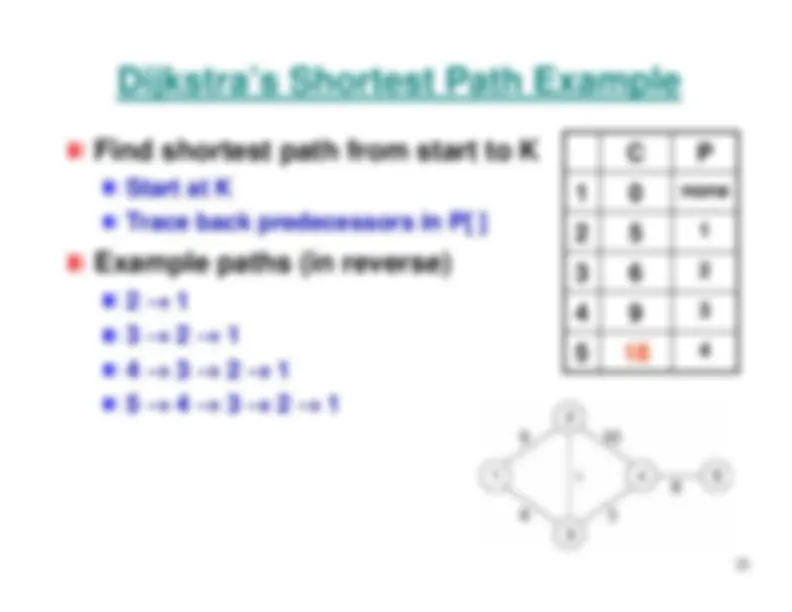
Only for paths through nodes in S Predecessor to K on shortest path
Updated whenever new (lower) C[K] discovered Remembers actual path with lowest cost
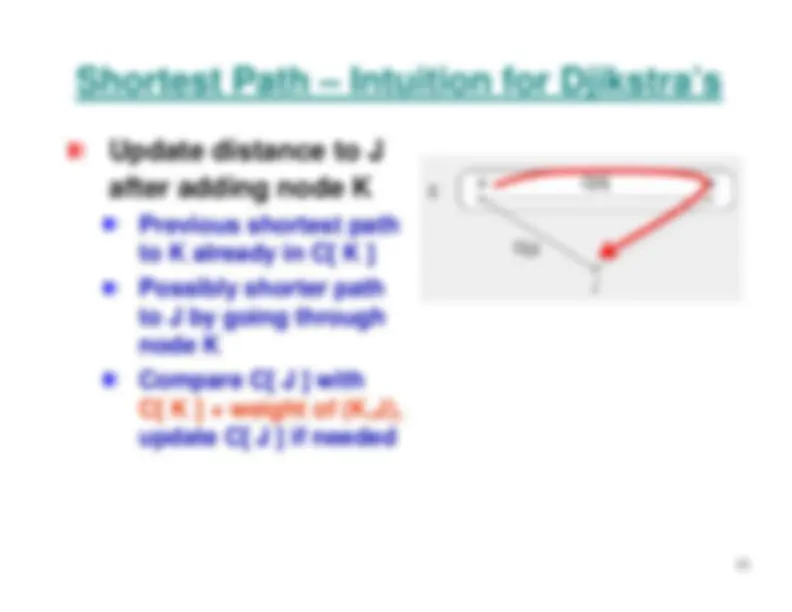
Shortest Path – Intuition for Dijkstra’s^ At each step inthe algorithm
Shortest pathsare known fornodes in
Store in
length ofshortest path tonode K (for allpaths throughnodes in { S } ) Add to { S } nextclosest node
Shortest Path – Dijkstra’s Algorithm S =^ ∅∅∅∅ P[ ] = none for all nodesC[start] = 0, C[ ] =
for all other nodes
while ( not all nodes in S
find node K not in S with smallest C[K] add K to Sfor each node J not in S adjacent to K
if ( C[K] + cost of (K,J) < C[J] )
C[J] = C[K] + cost of (K,J)P[J] = K
Dijkstra’s Shortest Path Example Initial state S =^
none ∞∞∞∞ 5
none ∞∞∞∞ 4
none ∞∞∞∞ 3
none ∞∞∞∞ 2
none 0 1
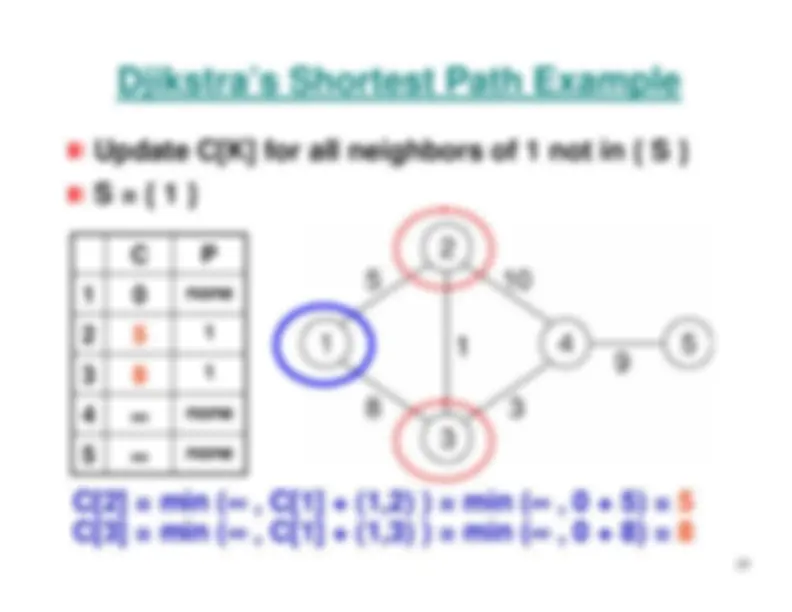
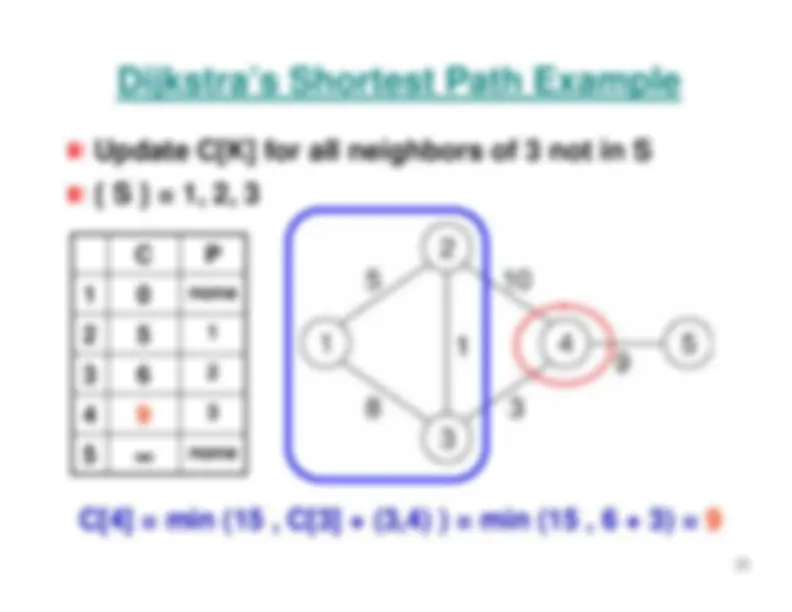
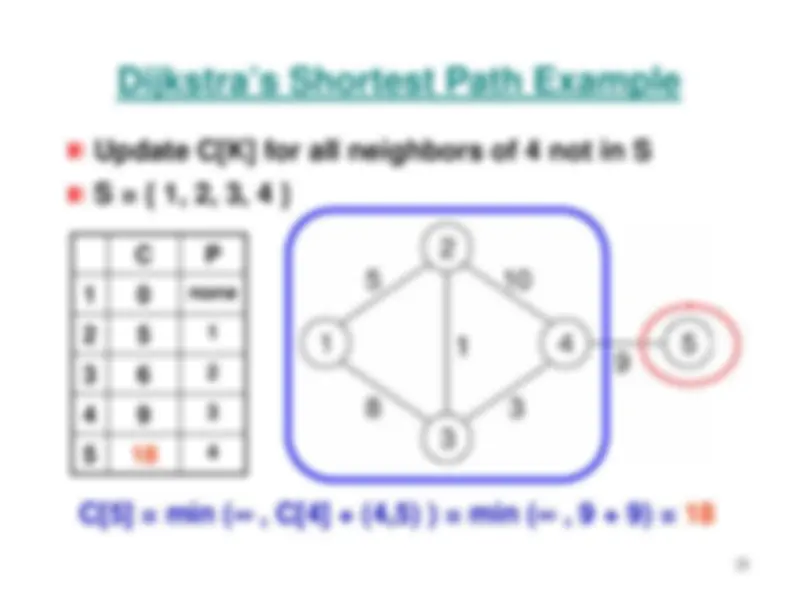
Djikstra’s Shortest Path Example Update C[K] for all neighbors of 1 not in { S } S = { 1 }
none ∞∞∞∞ 5
none ∞∞∞∞ 4
1 8 3
1 5 2
none 0 1
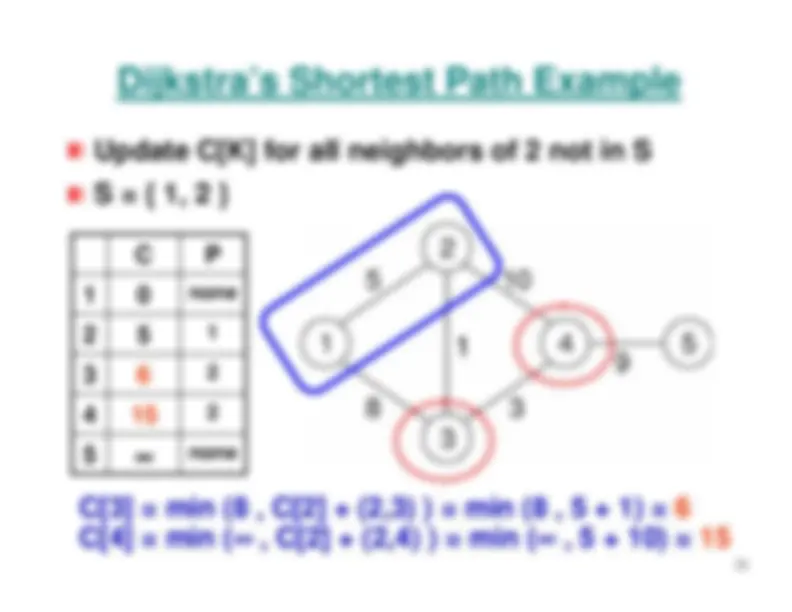
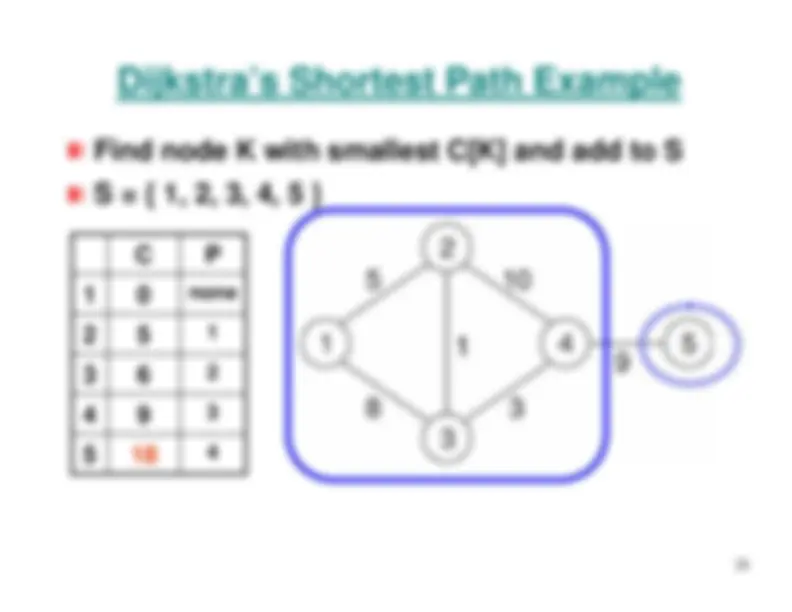
Djikstra’s Shortest Path Example Find node K with smallest C[K] and add to S S = { 1, 2 }
none ∞∞∞∞ 5
none ∞∞∞∞ 4
1 8 3
1 5 2
none 0 1