



Hidden Variables, the EM Algorithm,
and Mixtures of Gaussians
Computer Vision
Docsity.com

























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The challenges of dealing with missing data problems in computer vision, specifically focusing on outliers, object discovery, and segmentation. The concepts of maximum likelihood estimation and probabilistic inference, and explains how to handle 'hidden' variables using the em algorithm and mixture of gaussians. The document also covers the concept of 'hard em' and its advantages.
Typology: Lecture notes
1 / 41

This page cannot be seen from the preview
Don't miss anything!
Computer Vision
Docsity.com
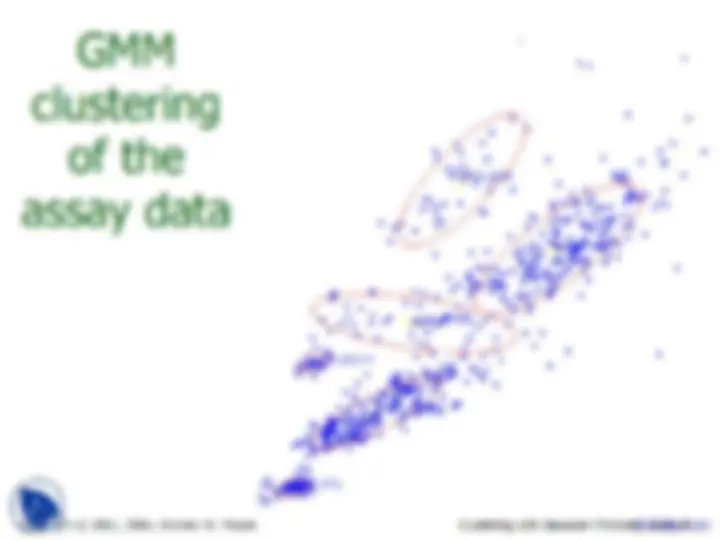
You have a collection of images and have extracted regions from them. Each is represented by a histogram of “visual words”.
Challenge: Discover frequently occurring object categories, without pre-trained appearance models.
http://www.robots.ox.ac.uk/~vgg/publications/papers/russell06.pdf Docsity.com
Foreground
Background
Foreground
Background
n
n
N
data (^) parameters
n
n
N
p x
p
x x
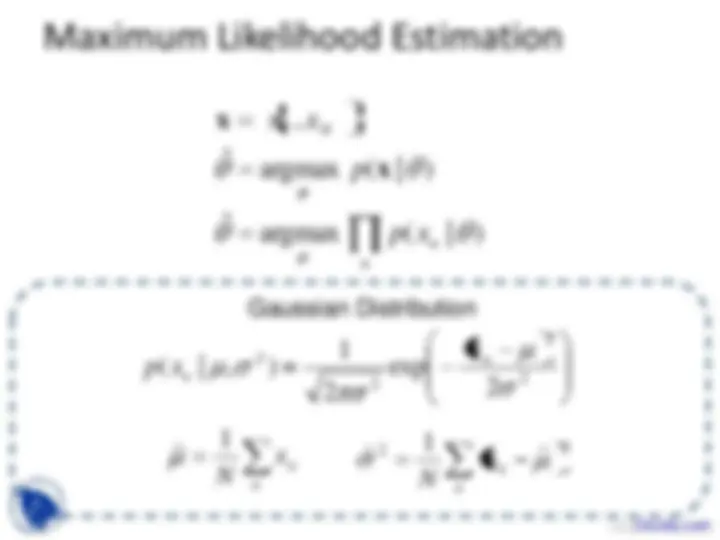
ˆ argmax ( | )
ˆ argmax ( | )
x
x
2
2
2
2
2
exp 2
1 ( | , )
n n
x p x
Gaussian Distribution
n
xn N
1 ˆ
n
xn N
2 2 ˆ
1 ˆ
mu_fg = mean(im(labels))
mu_fg = 0.
sigma_fg = sqrt(mean((im(labels)-mu_fg).^2))
sigma_fg = 0.
mu_bg = mean(im(~labels))
mu_bg = 0.
sigma_bg = sqrt(mean((im(~labels)-mu_bg).^2))
sigma_bg = 0.
pfg = mean(labels(:));
im labels
fg: mu=0.6, sigma=0. bg: mu=0.4, sigma=0.
Parameters used to Generate
component or label
component or label
n
n n m n n p x
p z m x p z m x
component or label
n
n n m n n p x
p z m x p z m x
k
n n k n k
n n m n m
p x z k p z k
p x z m p z m
k
n n k
n n m
p z k x
p z m x
pfg = 0.5;
px_fg = normpdf(im, mu_fg, sigma_fg);
px_bg = normpdf(im, mu_bg, sigma_bg);
pfg_x = px_fgpfg ./ (px_fgpfg + px_bg*(1-pfg));
fg: mu=0.6, sigma=0.1 im bg: mu=0.4, sigma=0.
Learned Parameters
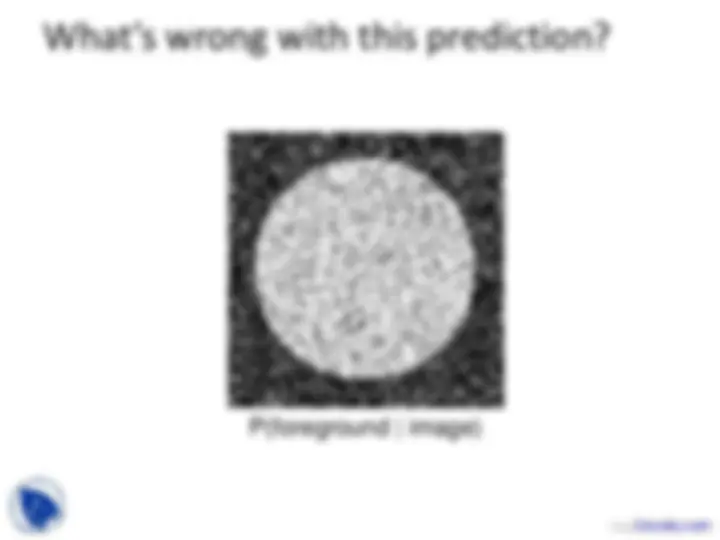
p(fg | im)
Result from “Bayesian Matting”, Chuang et al. 2001Docsity.com
Foreground
Background