AE420/ME471 – Homework assignment #1
Wednesday January 28, 2009
Due Wednesday February 11, 2009
Topic: Rayleigh-Ritz Method
Problem 1: Axially loaded bar
Consider the axially loaded bar shown below. The bar stiffness is E, its length is L and the cross-
section is A. The distributed axial load f(x) is given by
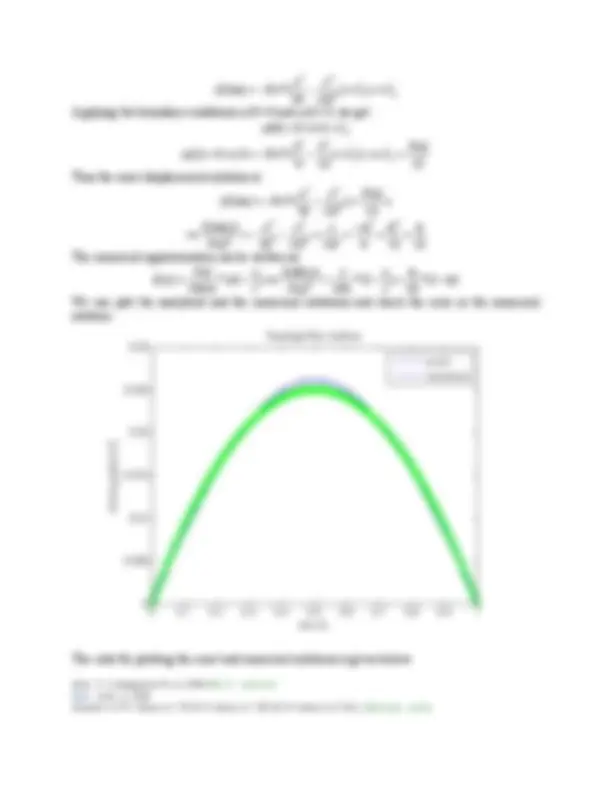
The exact solution for the maximum axial displacement measured in the middle of the bar as
The expression of the total potential energy for this structural system is
Using the simplest polynomial basis function, determine an approximate solution for the axial
displacement. Compare approximate and exact maximum axial displacements, i.e., compute the
relative error (in %).
Solution:
The governing differential equation is
This axial bar is constrained at both ends and hence the boundary conditions are
Both the b.c’s are essential boundary conditions and the choice of the basis function should
satisfy both the b.c’s.
The simplest polynomial basis function which satisfies both b.c’s is thus .
Thus the approximate solution to the problem using the Ritz method is
Substituting the approximate displacement into the expression of the potential energy yields: