Download Hyperbolic Partial Differential Equations - Lecture Notes | CSI 701 and more Study notes Computer Science in PDF only on Docsity!
Hyperbolic PDE’s
1.^
Analysis of numerical schemes
2.^
Finite difference methods
3.^
Finite volume methods
PDE solvers
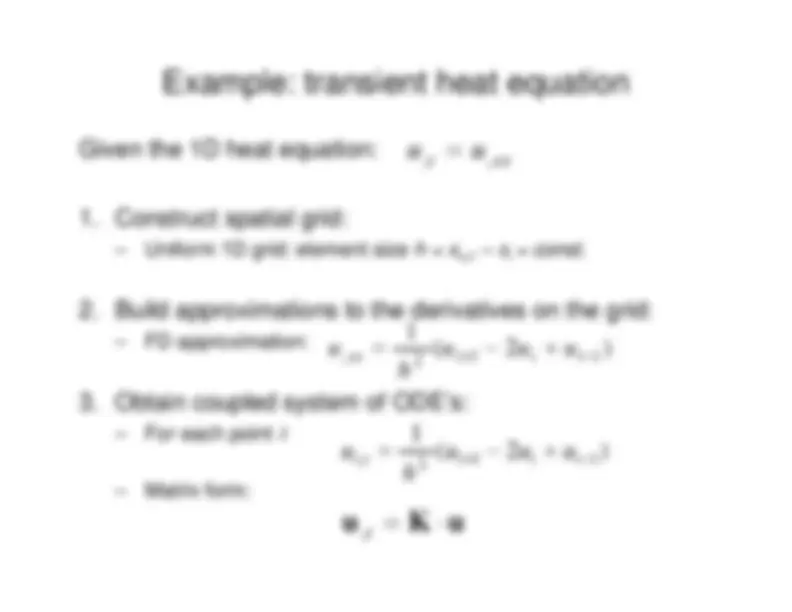
In general the solution of PDE’s proceeds as follows: 1.
Construct a spatial grid to represent continuousfunctions
Build approximations to the spatial derivatives on thisgrid (spatial discretization)
Obtain a system of ODE’s
Construct a temporal FD scheme to solve the ODEsystem
Advance the solution in time
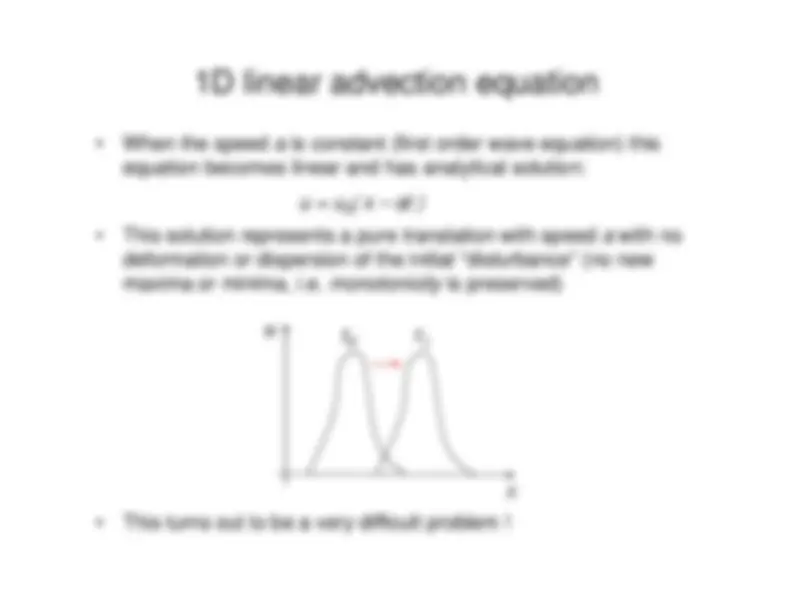
Example: transient heat equation
Construct the FD temporal scheme to solve the ODEsystem:
Code it and solve it
Remark 1: you will need to estimate the allowable time-step
for your solution scheme
Remark 2: you will also need to build approximations of the
boundary conditions and take them into account in thesolution algorithm
(^
1
1 2
1
n i n i
n i
n i
n i^
u
u
u
t h
u
u^
−
+^
Explicit and implicit schemes
-^
Typically time-dependent PDE’s are first discretized inspace using any of the methods described before
-^
This results in a system of coupled ODE’s that is thendiscretized usually using finite differences
-^
Numerical schemes are then classified as explicit orimplicit depending on how the time derivatives arediscretized
Mixed schemes
-^
Hybrid methods are obtained by linear combination ofexplicit and implicit schemes:
-^
: Forward Euler (explicit)
-^
θ=1/2: Crank-Nicholson (hybrid)
-^
: Backward Euler (fully implicit)
implicit
licit
t^
u
u
u^
exp
,
θ
θ^
(^
)^
(^
1 ) 1
1
(^11) 2
1
1 2
1
2
2
) (^1) (^
−
+^
−
Δ Δ
−
Δ Δ
−
−^
n i
n i
n i
n i n i
n i
n i
n i^
u
u
u tk x
u u
u tk x
u
u
Advancing explicit systems
(^
)
2
2
1 2 3
1 1 2 1 3 1 1
1 2 2 1 2 1
1
1 2
with
form
matrix
scheme
updating
scheme
explicit
tk x
b tk x
a
u u u u b a
a b a
a b a
b a
u u u u
u tk x
u tk x
u tk x
u
u u
u tk x
u
u
n n n n m
n n n n m
n i
n i
n i
n i
n i n i
n i
n i
n i
−
−
M
L
M M M M M M M
L L L
M
Explicit vs Implicit
-^
Explicit schemes require matrix multiplication
-^
Implicit schemes require matrix invertion (solution ofalgebraic system at each time step)
-^
So, why use implicit schemes? …
n
n
n
n
u
u A
u A
u
=
⋅
⋅ = +
1 1 :
scheme
implicit
:
scheme
explicit
Analysis of numerical schemes
Consistency •^
Approximation
PDE for
t,^
Δx
Stability •^
Long term effects of local and round-off errors
Convergence •^
Approximation
exact solution for
t,^
Δx
Accuracy •^
Magnitude of local errors
Efficiency •^
CPU and storage vs accuracy
Consistency
-^
Consistency expresses that the discretized equationsshould tend to the differential equations when
t and
x
tend to 0
-^
Condition on structure of numerical formulation
-^
Discretized equation
differential equation
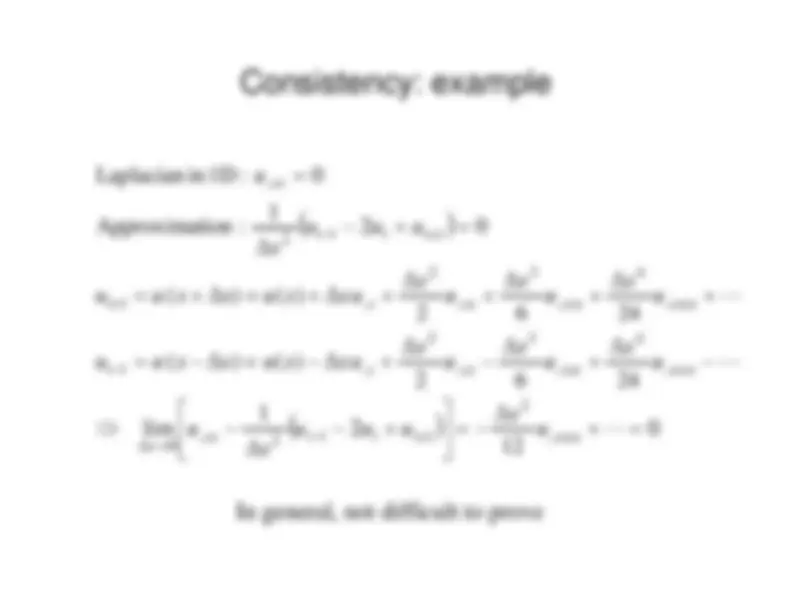
Consistency: example
(^
)
(^
)^
lim
ion
Approximat
1D
in
Laplacian
, 2 1 1 2 , 0
, 4 , 3 , 2 , 1 , 4 , 3 , 2 , 1
1
1
,^2
⎡^ ⎢ ⎣
−
→Δ
−
L
L L
xxxx
i i
i
xx
x
xxxx
xxx
xx
x
i
xxxx
xxx
xx
x
i
i i
i xx
u x u u u x u
u x u x u x
ux
x u x x u u
u x u x u x
ux
x u x x u u
u u
u u x
In general, not difficult to prove
Accuracy: example
(^
)
(^
)
accurate
order
Second
error of term
Leading
series
Taylor
ion
Approximat
1D
in
Laplacian
, 2
, 2 1 1 2 ,
1
1
,^2
−
−
xxxx
xxxx
i i
i
xx
i i
i xx
u x
u x u u u x u
u u
u u x
L
Stability
-^
The numerical scheme should not allow errors to growunbounded, i.e. amplified without bound between twosteps
-^
Condition on solution of numerical scheme
-^
Numerical solution
exact solution of discretized
equation
Convergence
-^
The numerical solution should approach the exactsolution of the differential equation as
t and
x tend to
zero
-^
Condition on solution of numerical scheme
-^
Numerical solution
exact solution of differential
equation
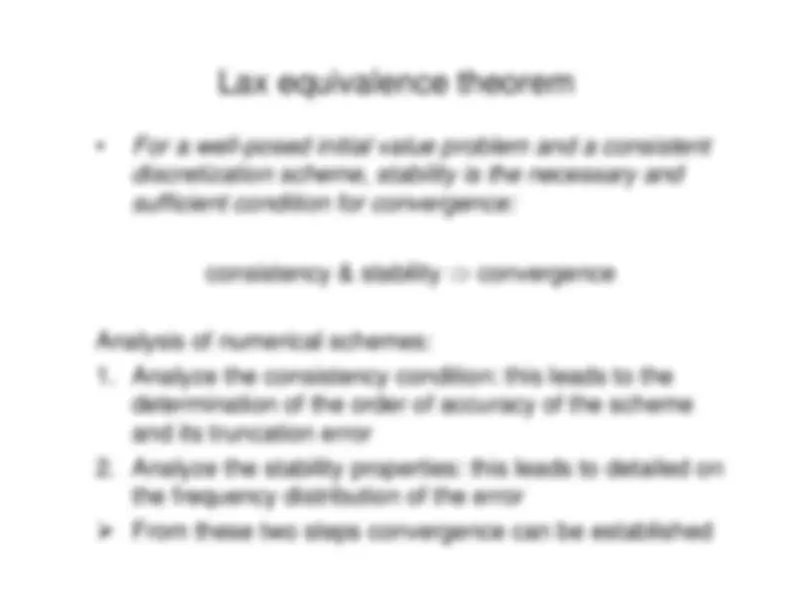
Lax equivalence theorem
-^
For a well-posed initial value problem and a consistentdiscretization scheme, stability is the necessary andsufficient condition for convergence:
consistency & stability
convergence
Analysis of numerical schemes: 1.
Analyze the consistency condition: this leads to thedetermination of the order of accuracy of the schemeand its truncation error
Analyze the stability properties: this leads to detailed onthe frequency distribution of the error
From these two steps convergence can be established