Download Image Alignment - Lecture Notes | COSC 6373 and more Study notes Computer Science in PDF only on Docsity!
Image Alignment
Acknowledgement: Notes by Profs. R. Szeliski, S. Seitz, S. Lazebnik, and S. Shah COSC 6373 Computer Vision
Image alignment
Image alignment: Challenges
Small degree of overlap Occlusion, clutter
Image alignment
- Two broad approaches: Direct (pixel-based) alignment Search for alignment where most pixels agree Feature-based alignment Search for alignment where extracted features agree Can be verified using pixel-based alignment
Alignment as fitting
- Last lecture: fitting a model to features in one image
- Alignment: fitting a model to a transformation
between pairs of features ( matches) in two images
Find model M that minimizes Find transformation T that minimizes M x i T x i x i '
Feature-based alignment outline
Feature-based alignment outline
- Extract features
- Compute putative matches
Feature-based alignment outline
- Extract features
- Compute putative matches
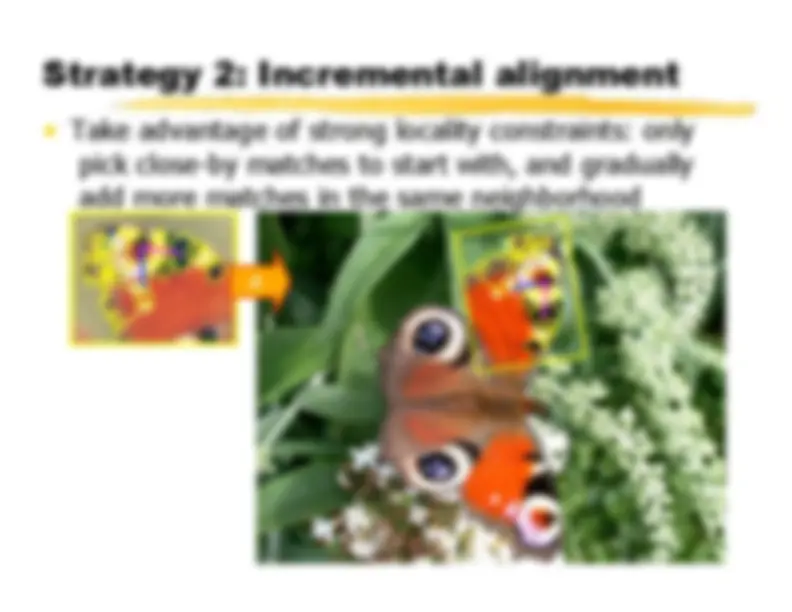
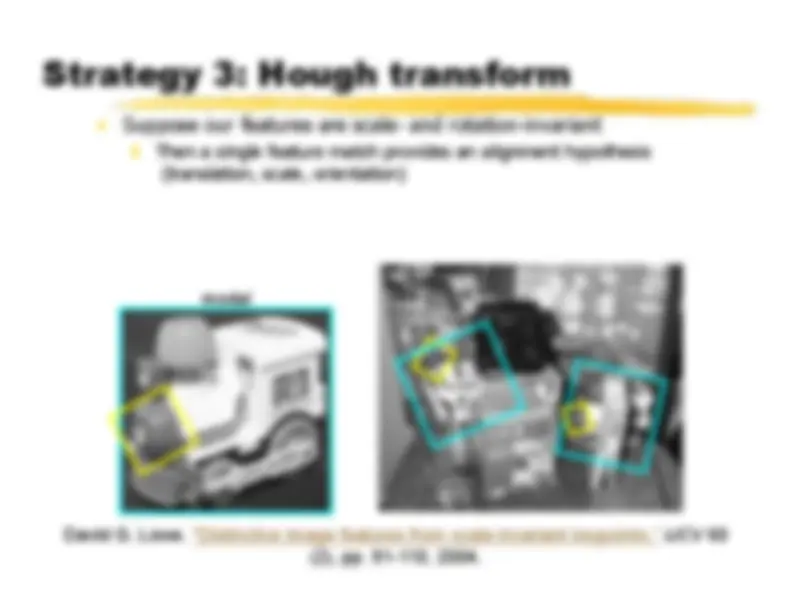
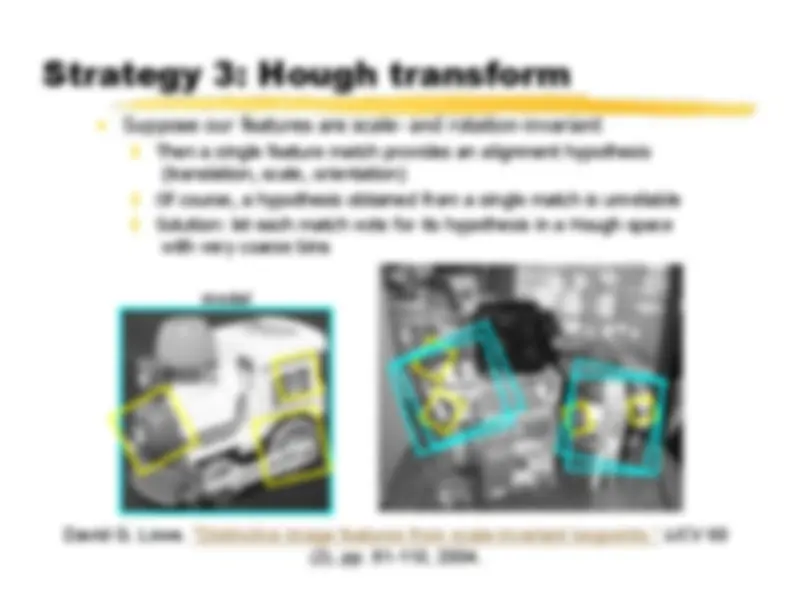
- Loop: Hypothesize transformation T (small group of putative matches that are related by T)
Feature-based alignment outline
- Extract features
- Compute putative matches
- Loop: Hypothesize transformation T (small group of putative matches that are related by T) Verify transformation (search for other matches consistent with T)
2D transformation models
- Similarity (translation, scale, rotation)
- Affine
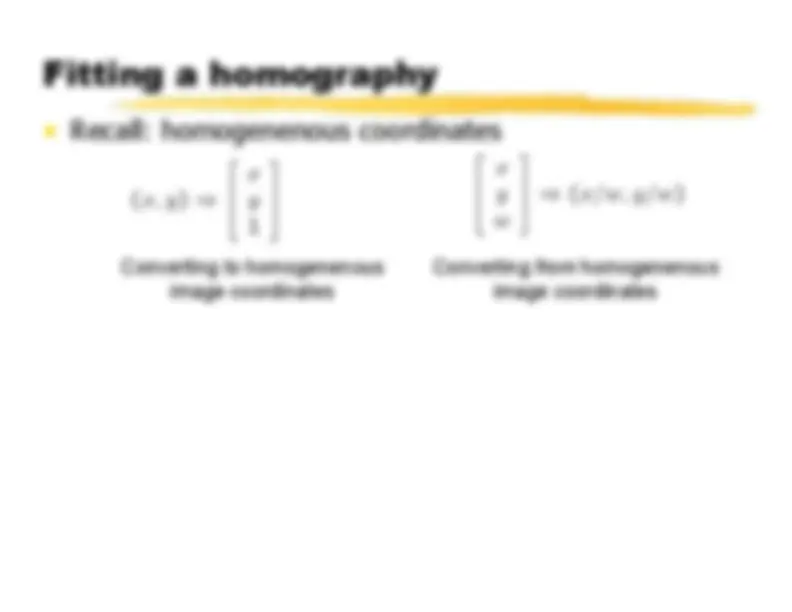
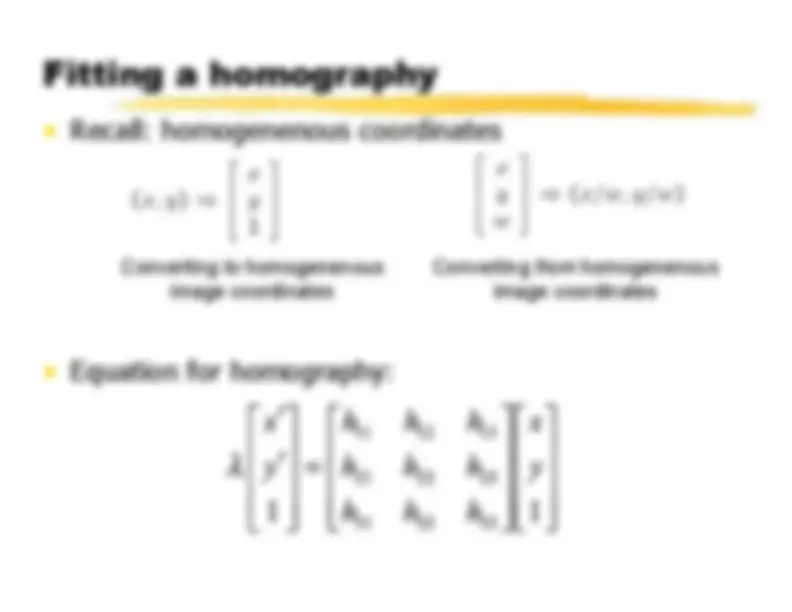
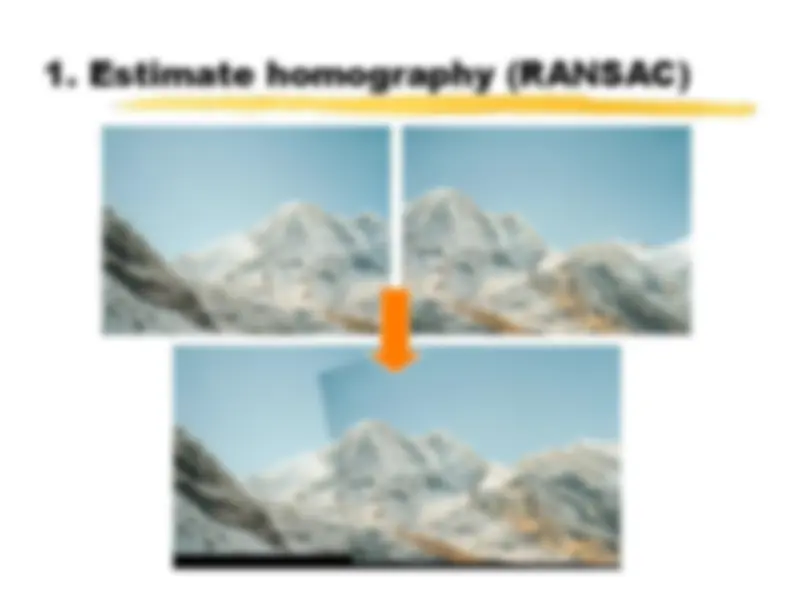
- Projective (homography)
Fitting an affine transformation
- Assume we know the correspondences, how do we get the transformation?
Fitting an affine transformation
- Linear system with six unknowns
- Each match gives us two linearly independent equations: need at least three to solve for the transformation parameters
What if we don’t know the correspondences?
- Need to compare feature descriptors of local patches surrounding interest points
feature descriptor feature descriptor
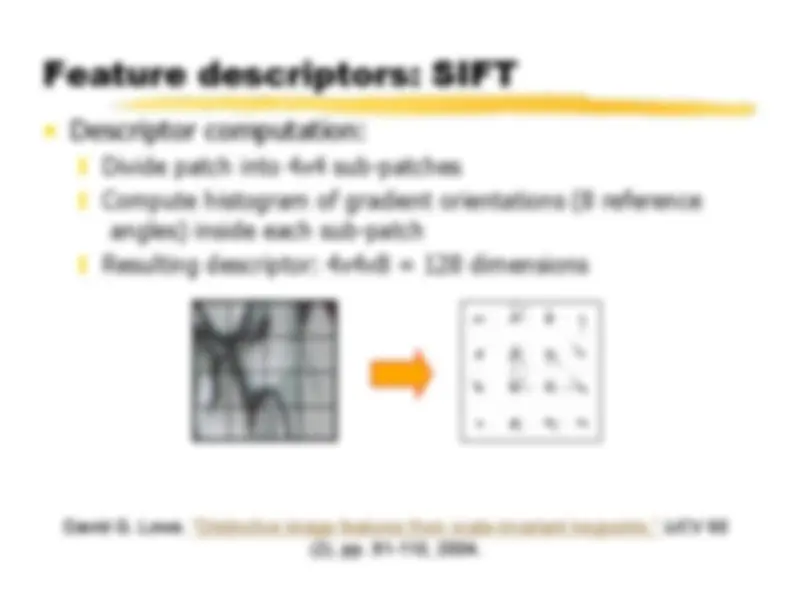
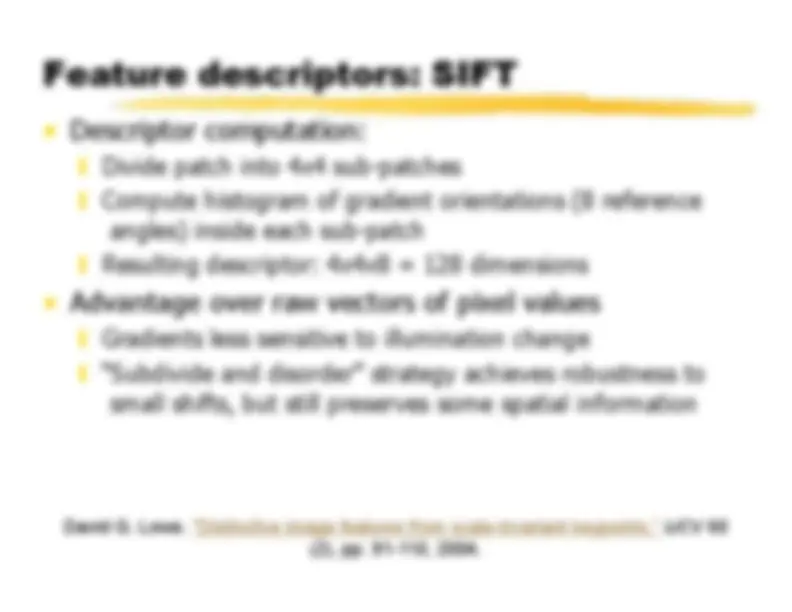
Feature descriptors
- Assuming the patches are already normalized (i.e., the local effect of the geometric transformation is factored out), how do we compute their similarity?
- Want invariance to intensity changes, noise, perceptually insignificant changes of the pixel pattern