



docsity.com





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This course contains solution of non linear equations and linear system of equations, approximation of eigen values, interpolation and polynomial approximation, numerical differentiation, integration, numerical solution of ordinary differential equations. This lecture includes: Interpolation, Finite, Difference, Operators, Newton, Forward, Interpolation, Backward, Lagrange, Cubic, Spline
Typology: Slides
1 / 39

This page cannot be seen from the preview
Don't miss anything!
y^
y^
y
^
^
1
1 ,^1
k^ k^ , (^ 1),...,
k i^
i^
i
y^
y^
y
i^ n^
n^
k ^
^
^
^
^1
1 (1 2)^
(1 2)
n^
n^
n
i^
i^
i
y^
y^
y
^
^
^
^
Thus
(^
)^ ( )
x^ x
h^
x y^ y
y
f^
x^ h^
f^ x
^
^
^
y^
y^
y
^
^
^ ( )^
(^ )
x^ x^
x^ h y^ y
y^
f^ x^
f^ x^ h ^
^
^
^
(^ / 2)^
(^ / 2)^
x^ x^ h
x^
h
^
^
Similarly
The inverse operator
-1 E
is defined as
1 ( )
(^
)
E^ f
x^
f^ x^
h
^
^
( )^
(^
)
n E f^
x^
f^ x
nh
^
^
(^ / 2)^
(^ / 2) 1 ( )^
2
2
2
1 x^2
h^
h^ x h
h
f^ x^
f^ x^
f^ x
y^
y
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
Important Results
(^1) E ^
^
1
1 1
E (^) E E ^ ^
1/ 2^
1/ 2 E^
E ^
^
^ 1/ 2^
1/ 2 1 (^
) E^2
E ^
^
log hD^
E
Newton’sNewton’sForwardForwardDifferenceDifferenceInterpolationInterpolationFormulaFormula
2
0
0
0 3 0
0 (^ 1) 2! (^ 1)(
(^
1)^
Error ! x
n p^ p y^ y^
p^ y^
y
p^ p^
p^
y p^ p^
p^ n^
y n
^ ^
^ ^
^
^ ^
^ ^
^
NEWTON’SBACKWARDDIFFERENCE INTERPOLATION
FORMULA
2 (^ 1) 2!^3 (^ 1)(^
2)^ (^
1)^
Error ! x^ n^
n^
n n
n n p p y^ y^
p^ y^
y
p p^
p^
y p p^
p^
p^ n^
y n ^ ^ ^ ^
^
^ ^ ^
^ ^
^
x^ x^ ^ np h
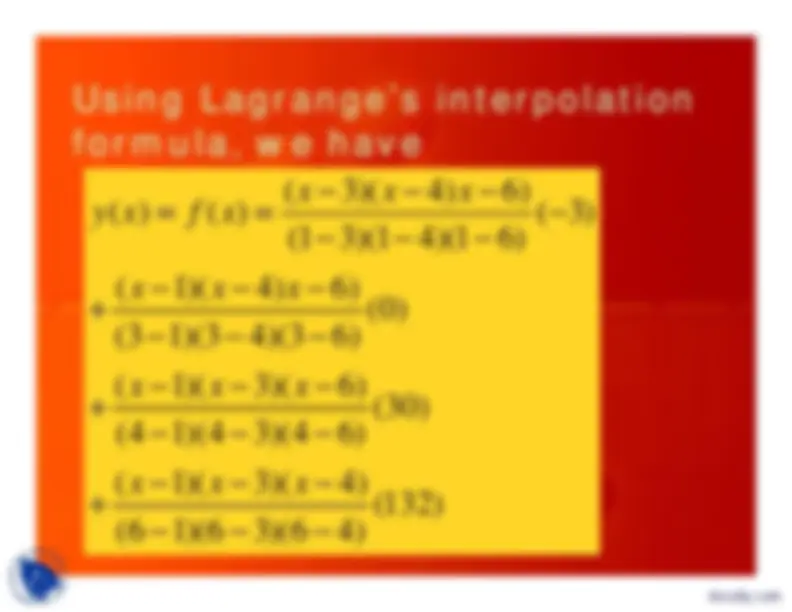
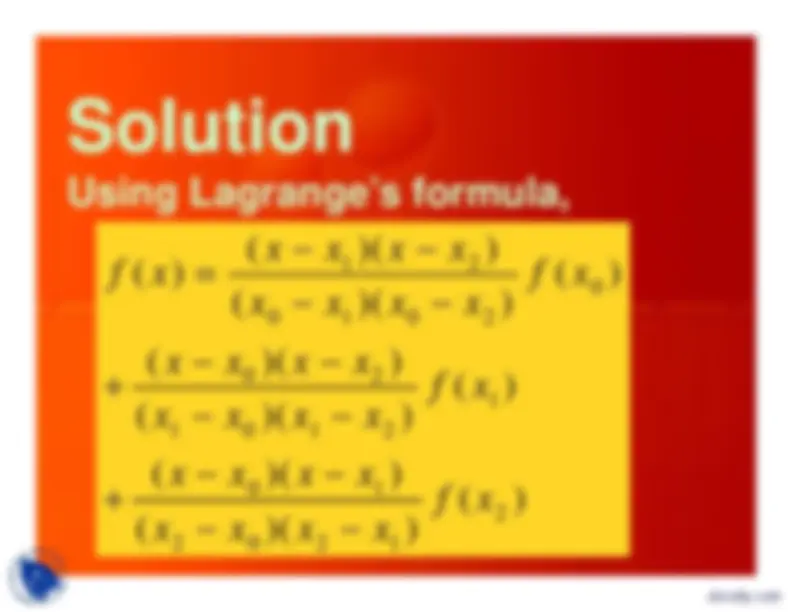
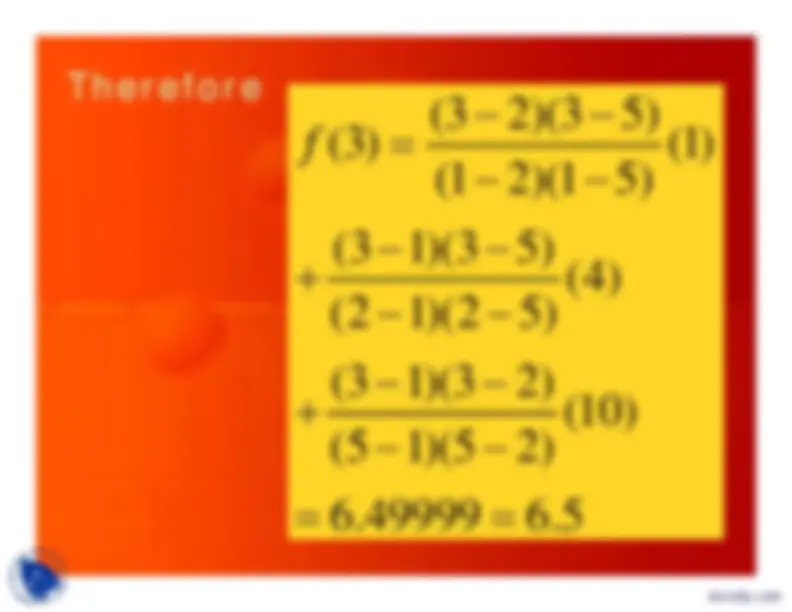
LAGRANGE’SINTERPOLATIONFORMULA
If the values of theindependent variable arenot given at equidistantintervals, then we have thebasic formula associatedwith the name of Lagrangewhich will be derived now.
Let^ y
=^ f^ ( x
) be a function
which takes the values, y, y^0
,…yn^
corresponding to x^ , x^0
, …x^ n
. Since there are ( n^ + 1) values of
y
corresponding to (
n^ + 1)
values of
x , we can represent the function
f^ ( x ) by a polynomial of degree
n****.