



Set 2: State-spaces and Uninformed
Search
ICS 271 Fall 2016
Kalev Kask
271-fall 2016
























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Introduction to Artificial Intelligence
Typology: Summaries
1 / 88

This page cannot be seen from the preview
Don't miss anything!
271 - fall 2016
271 - fall 2016
271 - fall 2016
271 - fall 2016
271 - fall 2016
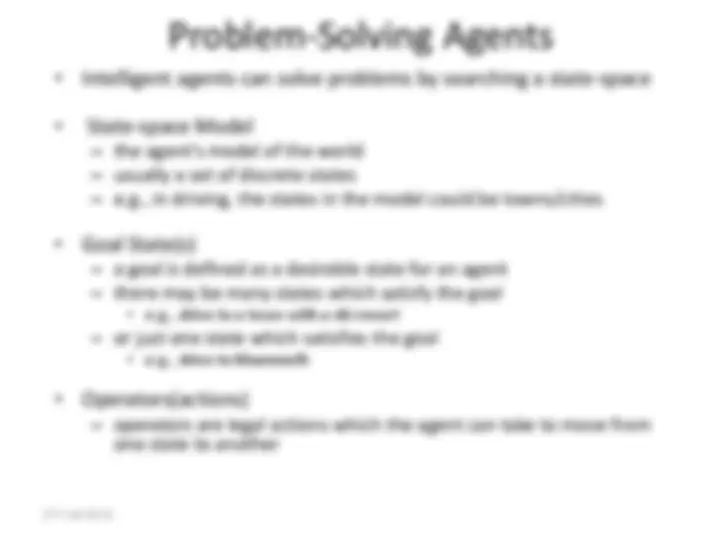
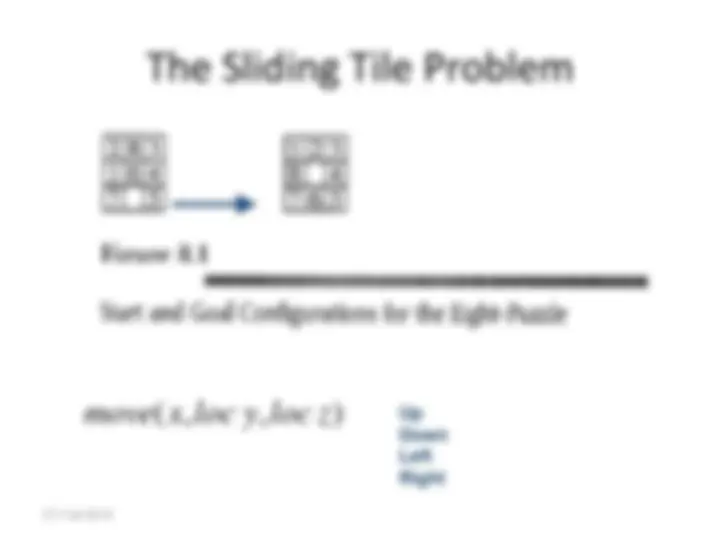
271 - fall 2016 State-Space Problem Formulation
271 - fall 2016
15
17
18
20
C A D E F B 271 - fall 2016