Download Introduction to Computer Vision - Lecture Notes | CS 510 and more Study notes Computer Science in PDF only on Docsity!
^ J. Ross Beveridge, February 16, 1999
Introduction to Computer Vision w^ Definitions w^ Related areas w^ Research and Application Areas^ ü^ Areas listed in Text Book^ ü^ CVPR 1999 Areas w^ Resources^ ü^ Journals & Conferences^ ü^ Web resources^ ü^ Support Environments w^ What we will cover this Semester
^ J. Ross Beveridge, February 16, 1999
Definitions
w^ General:^ To endow machines with the ability to see. w^ More technical^ Compute properties of the 3D world from digital imagery. w^ Active^ Control a autonomous processes with the aid of visual input. w^ Physics/Math^ Resolve mathematically ill-posed 3D reconstruction problemsusing general constraints derived from the physics. w^ Artificial Intelligence^ Infer semantically important properties of an environmentusing prior knowledge.
^ J. Ross Beveridge, February 16, 1999
Research Areas: TruccoImage Feature DetectionContour representationFeature-based SegmentationRange image analysisShape modeling and representationShape reconstruction from single-image cuesStereo visionMotion analysisColor visionActive visionInvariantsUncalibrated and self calibrating systems3-D object detection3-D object locationHigh-performance and real-time architectures
^ J. Ross Beveridge, February 16, 1999
Research Applications: TruccoIndustrial inspection and quality controlReverse engineeringSurveillance and securityFace recognitionGesture recognitionRoad monitoringAutonomous vehiclesHand-eye robotics systemsSpace applicationsMilitary applicationsMedical image analysisImage databasesVirtual Reality
^ J. Ross Beveridge, February 16, 1999
Resources - Publications w Conferences ü International Conference on Computer Vision (ICCV) ü Computer Vision and Patter Recognition (CVPR) ü European Conference on Computer Vision (ECCV) ü International Conference on Image Processing (ICIP) ü International Conference on Pattern Recognition (ICPR) w Journals ü International Journal of Computer Vision ü Transactions on Pattern Analysis and Machine Intelligence ü Computer Vision and Image Understanding ü Machine Vision and its Applications ü Image and Vision Computing Journal ü Pattern Recognition (and more)
^ J. Ross Beveridge, February 16, 1999
The Computer Vision Homepage
^ J. Ross Beveridge, February 16, 1999
Acquiring Digital Images w Basic Facts w Basic Radiometry w Spatial Sampling ü The continuity assumption w Acquisition Noise ü Perhaps the one correct use of the term “noise”. w Camera Parameters ü Intrinsic ü Extrinsic
^ J. Ross Beveridge, February 16, 1999
Dealing with Noise w Different Noise Models w Gaussian noise ü Each measurement slightly in error relative to truth. w Impulsive noise ü Small subset of measurements wildly in error. w Noise supression ü Gaussian smoothing ü Median filtering
^ J. Ross Beveridge, February 16, 1999
Image Features - Basic w Edge Detection, Walking through the Canny Algorithm ü Conceptual phases ß Noise smoothing ß Edge enhancements ß Edge localization ü Criteria for Optimal Edge Detection ß Good detection ß Good localization ß Single response
^ J. Ross Beveridge, February 16, 1999 CS510 - Computer Graphics, Spring 1999CS510 - Computer Graphics, Spring 1999
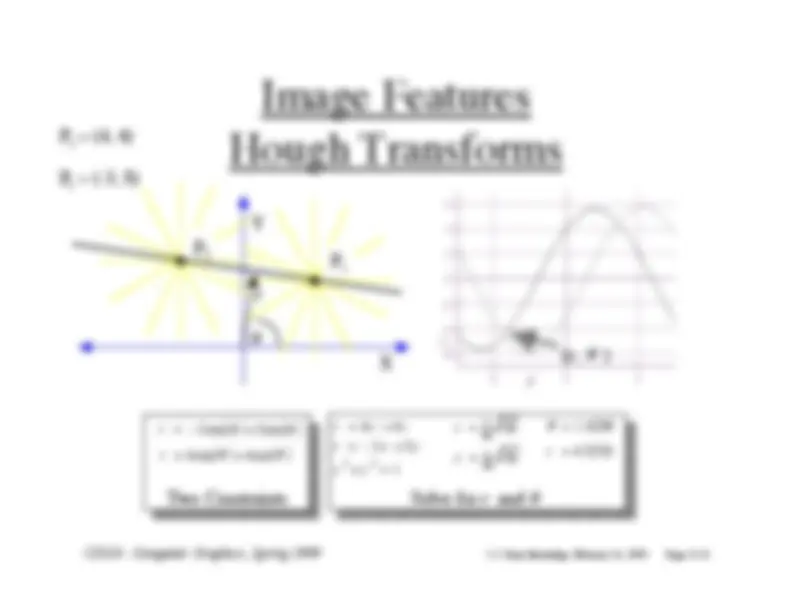
Image FeaturesHough Transforms^ r^^4 c^^4 s += r 3 cos θ− 5 sin^ θ+= −^^ r^^3 c^5 θ θ r 4 cos4 sin+=
7 θ^ s^50 = (^50) s +=^1 c^50 = (^2 250) s c (^) + 1 = 1.4289= r 4.5255= Two Constraints^
Solve for^ r^ and^ θ P = (4, 4)^1 P = (-3, 5)^2
Y X P^2 P (^1) r θ
θ^ ( r, )
^ J. Ross Beveridge, February 16, 1999
Combining Pose & Matching