



Kinematics, Kinematics Chains









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The basics of kinematics, focusing on rigid body transforms and kinematic chains in the context of robotics. Topics include representation of rigid body motion, homogeneous coordinates, composition and inverse of transforms, kinematic chains, forward and inverse kinematics, and Jacobians. The document also touches upon mobile robot kinematics and different types of wheels.
Typology: Lecture notes
1 / 17

This page cannot be seen from the preview
Don't miss anything!
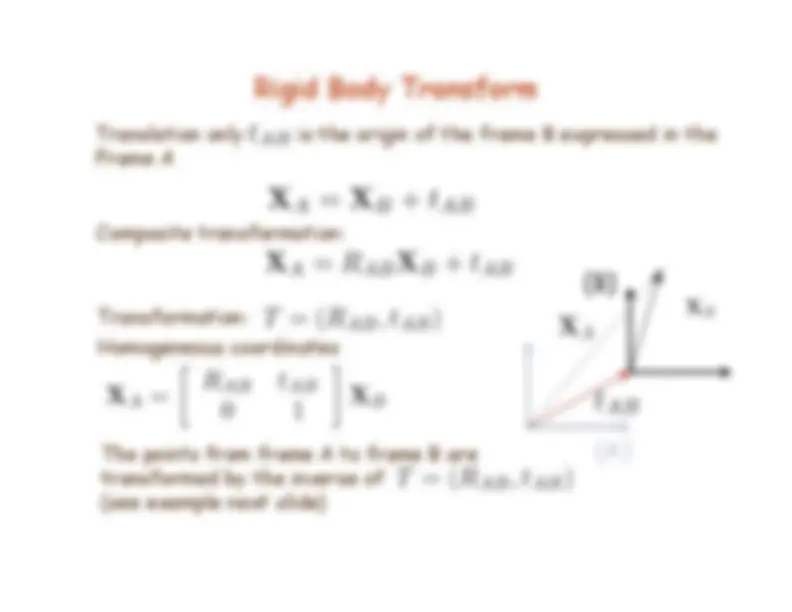
coordinate frames
coordinates
lined together (e.g. robot manipulator)
velocity, acceleration regardless of the forces
manipulator and mobile robot
the joint angles
In 2D we need only link length and joint angle to
specify the transform
In 3D Denavit-Hartenberg
parameters (see LaValle (chapter [3])
an arm controlled near these points
in joint space and velocities in end-effector space
can be determined knowing the joint angles
certain position
wheels
of the robot, history is important
Position and type of the wheels
Two types of wheels
a) Standard – rotation around
(motorized) wheel axel and
the contact point
b) Castor wheel – rotation around
wheel axes, contact point and
castor axel
c) Swedish wheels
d) Ball wheels
frame
€
cos θ −sin θ x
sin θ cos θ y
0 0 1
⎡
⎣
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
always tell where the end effector is
cannot tell where the robot is
changes in pose
chassis
frame
x ˙
y ˙
θ
R
v l +v r
2
vr −vl
l
v
ω
x ˙
y ˙
θ
R
cos θ sin θ 0
− sin θ cos θ 0
x ˙
y ˙
θ
I